Detección de deterioros en pavimentos flexibles a partir del procesamiento de imágenes y modelos de su superficie.
Detection of deterioration in flexible pavements from the processing of images and models of its surface
Detección de deterioros en pavimentos flexibles a partir del procesamiento de imágenes y modelos de su superficie.
Revista de Arquitectura e Ingeniería, vol. 13, núm. 1, pp. 1-12, 2019
Empresa de Proyectos de Arquitectura e Ingeniería de Matanzas

Esta obra está bajo una Licencia Creative Commons Atribución 4.0 Internacional.
Recepción: 22 Enero 2019
Aprobación: 18/02/19
Resumen: En Cuba, la evaluación de los pavimentos, se lleva a cabo por inspección visual manual, la cual requiere un extenso trabajo de campo, nivel de exposición al tráfico y ofrece resultados subjetivos. La investigación se desarrolla por la necesidad de implementar la detección automática de deterioros en pavimentos flexibles, a partir del procesamiento digital de imágenes, para las condiciones de Cuba, en aras de resolver las cuestiones antes descritas. Se estableció un procedimiento para la obtención de imágenes en un tramo de pavimento flexible a partir del equipamiento disponible. Las imágenes fueron procesadas en el Software eCognition, a partir de la segmentación por multirresolución, para la detección y clasificación de los deterioros, fundamentalmente, los del tipo de grietas. Para la detección de deformaciones se emplearon los softwares Agisoft PhotoScan y GlobalMapper en el tratamiento del modelo de superficie del pavimento. Al analizar los resultados obtenidos se concluye que es factible el empleo del procedimiento digital de imágenes propuesto para en la evaluación de pavimentos.
Palabras clave: deterioros, detección automática, procesamiento digital de imágenes, fotogrametría, tratamiento de modelos de superficie.
Abstract: In Cuba, the evaluation of the pavements is carried out by manual visual inspection, which requires extensive field work, level of exposure to traffic and offers subjective results. The research is developed by the need to implement the automatic detection of deteriorations in flexible pavements, from the digital processing of images, for the conditions of Cuba, in order to solve the questions described above. A procedure was established for obtaining images on a stretch of flexible pavement from the available equipment. The images were processed in the eCognition Software, based on multiresolution segmentation, for the detection and classification of deteriorations, fundamentally, those of the crack type. For the detection of deformations, the Agisoft PhotoScan and GlobalMapper softwares were used in the treatment of the surface model of the pavement. When analyzing the results obtained, it is concluded that the use of the digital image procedure proposed for the pavement evaluation is feasible.
Keywords: deterioration, automatic detection, digital image processing, photogrammetry, treatment of surface models.
INTRODUCCIÓN
Existen varias metodologías que tratan la detección automática de deterioros, basadas fundamentalmente, en el análisis de las imágenes superficiales del pavimento, siendo los deterioros de tipo grietas, los más comunes tratados por estas. Sobre la detección automática de grietas, diversos autores definen a las grietas como un conjunto de pixeles más oscuros que el fondo y que mantienen una conexión entre sí con una orientación definida. Dentro de las metodologías se encuentran: métodos basados en transformadas, en umbrales, en filtros, en redes neuronales, en segmentación, monitoreo, entre otras. Estas, en su mayoría, se encargan de transformar las imágenes a otro espacio más allá de la percepción humana para extraer información oculta permitiendo identificar las características predominantes de la imagen.
Henrique Oliveira y Paulo Lobato Correia participan en la 17 Conferencia Europea de Procesamiento de Señales, en 2009, con una ponencia titulada, “Automatic road crack segmentation using entropy and image dynamic thresholding” [1], donde exponen una nueva forma de clasificación y detección automática de grietas a partir de la adquisición de imágenes de grietas en un vehículo de alta velocidad. Las imágenes resultantes fueron procesadas usando filtros morfológicos para la reducción de las distintas intensidades de los pixels. Entonces, un umbral dinámico se aplica para identificar los pixeles oscuros en las imágenes, ya que estos corresponden a los pixeles de grietas potenciales. El sistema de clasificación etiqueta la imagen de acuerdo a lo encontrado: Grietas horizontales, verticales, varias o ninguna. Las siguientes imágenes muestran el vehículo de inspección empleado y el esquema empleado para la detección y clasificación de grietas.
En el artículo titulado “Automatic Pavement Crack Detection Using Texture and Shape Descriptors.” [2]; realizado por Yong HU y otros, se propuso un nueva técnica de detección automática de deterioros en pavimentos, basado en el análisis de texturas y descripción de formas. Comparado con detectores de bordes tradicionales, los resultados experimentales demostraron que todas las grietas son detectadas correctamente por el método propuesto, aún en fondos con textura compleja o en superficies con iluminación desigual.
En el año 2010, es publicado en la Sexta Conferencia Internacional de Comunicación Natural, titulado"Recongnition of pavement surface crack" [3], por Zhang y Li, que propuso una arquitectura de harware para sistemas de reconocimiento de grietas en imagenes de pavimentos y describió cada uno de sus subsistemas. También evaluó y comparó otras técnicas conocidas de detención de fronteras y bordes como los argoritmos de Sobel o Prewitt y propuso un nuevo algoritmo que mejoró los resultados de los antes mencionados. El sistema reconoció grietas mayores de 3mm con un exactitud de 90%.El método propuesto se basó en el principio de que el deterioro genera pixeles más oscuros que el resto de la losa. También se utilizó la técnica del tensor Voting para unir las discontinuidades presentes en el deterioro al momento de realizar la detención.
En el año 2010, Na Wei y otros, expusieron un artículo titulado “Beamlet Transform Based Pavement Image Crack Detection.” [4], en la Conferencia Internacional de Tecnología de Computación Inteligente y Automatización, el cual se enfocó en la detección de grietas superficiales mediante imágenes del pavimento, usando la transformada Beamlet con el objetivo de identificar líneas, curvas u objetos en imágenes con mucho ruido o imágenes segmentadas. Esta investigación permitió comprobar que el uso de la transformada Beamlet para detección de grietas es inmune al ruido presente en las imágenes, lo que garantiza eficiencia en el análisis generado al hacer el procesamiento.
En 2011, He Youquan y otros, exponen un artículo, titulado “Studying of road crack image detection method based on the mathematical morphology.” [5], en el Cuarto Congreso Internacional de Procesamiento de Imágenes y Señales (CISP), por sus siglas en inglés, que muestra la introducción de una morfología matemática dentro de las aplicaciones para el análisis y procesamiento de las imágenes del pavimento, para luego detectar las grietas. Los resultados experimentales, mostraron que el método no elimina el ruido totalmente, pero extrae los bordes de la imagen con precisión y claridad, resolviendo el problema del daño en el borde de la imagen causado por la supresión del ruido. Adicional a las metodologías propuestas anteriormente, existen sistemas que integran algunas de las técnicas mencionadas con elementos hardware, con la finalidad de crear un sistema que abarque todas las etapas necesarias para la adquisición, detección y clasificación de fallas en el pavimento.
En el año 2012, Qin Zou y otros, publican el artículo "CrackTree: Automatic crack detection from pavement images." [6], donde exponen un método automático de detección de grietas a partir de imágenes del pavimento. El método propuesto constó de tres pasos: primero se realiza un algoritmo geodésico para la eliminación de sombras, luego se construye un mapa de probabilidad de la grieta usando tensor Voting para mejorar la conexión de los fragmentos de la grieta y finalmente se construye un modelo gráfico de representación en árbol muestreando la fuente de las grietas halladas en el paso anterior, con el fin de minimizar la extensión de sus bifurcaciones y eliminar las aristas de los mismos detectando la forma de la grieta. El método fue evaluado en 206 imágenes de pavimentos y los resultados mostraron un mejor rendimiento respecto a varios métodos existentes.
En el 2012, Sandra Magaly Ramírez Jiménez, en su tesis de maestría titulada “Detección de grietas en la cinta asfáltica mediante análisis de imágenes.” [7], propuso un método invariante a la iluminación para detectar grietas en la superficie de la cinta asfáltica. En la primera etapa del método se mejoró la imagen creando y extrayendo un patrón de iluminación. En la segunda etapa se aplicó la transformada Wavelet, se calculó un umbral y se binarizó la imagen. Finalmente se calcularon dos parámetros de forma: excentricidad y el grado. Se concluyó que un objeto con valor de excentricidad cercano a 1 y grado cercano a 0, se consideraba una grieta. Se evaluó el método propuesto y una variación que consistió en aplicar la transformada Wavelet por ventanas. Se observó que los métodos evaluados eran robustos ante la presencia de sobras y manchas, aun cuando la sensibilidad fue menor para formas curvas y finas. Sin embargo, por el método de la transformada Wavelet por ventanas, las grietas se detectaron automáticamente con una especificidad de 1mm de ancho, siendo ésta metodología la que proporcionó un resultado más rápido.
En el año 2015, Uriel García Carrasco y otros, publicaron un artículo titulado “Detección y evaluación de daños en pavimento asfáltico mediante procesamiento de imágenes digitales." [8], que describió un procedimiento para la detección y evaluación de daños en pavimento asfáltico mediante técnicas de PDI. Inicialmente, se eliminó el ruido presente en la imagen, y se realizó la calibración, para obtener una referencia equivalente en unidades de longitud.
1. MÉTODOS Y MATERIALES
Para la ejecución y desarrollo de este trabajo fue necesaria la obtención de imágenes, tomadas con una cámara fotográfica Nikon D300, que cubran totalmente el área de estudio, con un solape entre imágenes adyacentes superior al 60 %, el procesamiento fotogramétrico de estas imágenes, se llevó a cabo en el software Agisoft Photoscan, para obtener el ortomosaico y el modelo digital de la superficie del pavimento y el posterior tratamiento de estos resultados con el software eCongnition Developer, para detectar los deterioros tipo grieta que se presentan en tramo de pavimento seleccionado, y el software GlobalMapper para la obtención de los perfiles transversales de las deformaciones.
1.1. Parámetros de cámara y toma fotográfica
La planificación de la toma fotográfica es un tema de gran importancia dentro del proceso fotogramétrico, pues el resultado exitoso del proyecto quedará definido por una buena planificación. Por ello, primeramente, se deben definir los datos iniciales necesarios, relacionados con el elemento a fotografiar, así como datos específicos de la cámara a utilizar en el proceso, antes de adentrarse al cálculo del proyecto fotogramétrico. A continuación, se exponen las características principales de la cámara empleada para la investigación (Figura 1) y los datos de la toma fotográfica.
Características de la cámara
- Formato: 23,6 x 15,8 mm
- Tamaño de la imagen: 4288 x 2848 pixeles (12.1 MP)
- Distancia focal: 18.0 mm
- Resolución 5.5 µm
Datos de la toma fotográfica
- Solape longitudinal: 70 %
- Distancia: 1,70 m
- GSD: 0,50 mm
- Distancia entre fotografías: 0,50 m
- Cantidad de fotografías: 21

Fig1
Cámara Nikon D300 utilizada en toma fotográfica.
Los requisitos generales, esenciales que se deben tener en cuenta respecto a la toma fotográfica son los siguientes:
Para obtener una buena calidad en las imágenes, es recomendable emplear una cámara fotográfica con una resolución mayor de 10Mpx.
La distancia focal del lente debe permanecer fija durante la toma de las imágenes y no se debe utilizar el zoom. Preferentemente deberán utilizarse lentes con distancia focal fija, de utilizar lentes de zoom, la distancia focal se debe poner en su valor máximo o mínimo.
Se recomienda utilizar trípode para apoyar la cámara fotográfica y evitar movimientos innecesarios.
El valor de apertura debe ser alto para producir la profundidad focal suficiente, esto es importante para mantener la mayor parte de los detalles visibles claramente y no borrosos.
Las imágenes se deben tomar a la resolución máxima posible que permita la cámara y se recomienda capturar siempre las imágenes crudas, en formato RAW, con el objetivo de poder realizar cambios de iluminación en ellas sin alterar su contenido.
Las imágenes no se deben redimensionar, rotar o de cualquier modo transformarlas desde el punto de vista geométrico, ya que el software que se utiliza para el procesamiento fotogramétrico utiliza las imágenes originales.
Es preferible convertir las imágenes de formato RAW a formato TIFF, ya que el formato JPG es un formato comprimido que elimina información redundante e introduce ruido no deseado a las imágenes.
1.2. Procesamiento de las imágenes con deterioros del tipo grietas
Procedimiento para el procesamiento fotogramétrico de las imágenes obtenidas
Una vez obtenidas las imágenes en formato TIFF, estas se importan en el software Agisoft Photoscan para su procesamiento fotogramétrico.
Con el objetivo de orientar correctamente los ejes de coordenadas, se crea un fichero en formato TXT, con las coordenadas aproximadas de las posiciones de la cámara, a la primera imagen se le asignan coordenadas arbitrarias y al resto de las imágenes, se va adicionando a las abscisas (X), el intervalo entre fotografías, mientras que las ordenadas (Y) se mantienen constante.
Se establecen el sistema de coordenadas y las precisiones a priori de las posiciones de la cámara y se importa el fichero creado anteriormente.
Seguidamente procedemos a orientar las imágenes, el software a partir de la detección automática de puntos homólogos, determina las posiciones exactas de la cámara en cada imagen. Como resultado de este proceso se obtienen, la nube de puntos de los puntos homólogos (nube dispersa) y las posiciones exactas de la cámara en cada una de las imágenes.
Conocidas con exactitud las posiciones de la cámara en cada una de las imágenes y los elementos de orientación de estas, procedemos a confeccionar la nube de puntos densa, determinando la posición espacial de cada pixel.
Una vez obtenida la nube de puntos densa, procedemos a obtener el modelo digital de la superficie del pavimento.
Con el modelo digital de superficie y las posiciones exactas de la cámara en cada toma, podemos obtener el ortomosaico del tramo, es decir una imagen libre de deformaciones geométricas.
Detección y clasificación de las grietas en el pavimento
Para detectar y clasificar las grietas presentes en las imágenes del pavimento, utilizaremos el software eCognition, donde primeramente creamos un nuevo proyecto, importando el ortomosaico y el modelo digital de la superficie del pavimento, resultados del procesamiento fotogramétrico de las imágenes.
El siguiente paso para poder detectar y clasificar las grietas presentes en el pavimento, es realizar la segmentación de las imágenes. El software eCognition, cuenta con varios procedimientos para realizar la segmentación de imágenes, siendo el método de segmentación por multiresolución el que ofrece mejores resultados.
El algoritmo de segmentación por multiresolución fusiona repetidamente los pixeles de una imagen, siempre que no se exceda localmente un umbral superior de homogeneidad. Como primer paso del procedimiento, el pixel semilla busca el vecino que mejor se adapte para una posible fusión. Si el ajuste no es mutuo, el pixel candidato se convierte en el nuevo pixel semilla y encuentra su mejor compañero de ajuste. Cuando la adaptación es mutua, los objetos de imagen se fusionan. Los bucles continúan hasta que no sea posible una nueva fusión (Figura 2).

Fig2
Segmentación por multiresolución
Una vez segmentada la imagen, procedemos a realizar la clasificación de los objetos de imagen obtenidos. El software eCognition asigna un objeto a una clase determinada en función de que cumplen o no con los criterios establecidos. Por las características de los objetos a detectar, los criterios geométricos son los más idóneos y entre ellos, específicamente la Asimetría, que describe la longitud relativa de un objeto de imagen, en comparación con un polígono regular (Figura 3). Una elipse se aproxima a un objeto de imagen dado, que se puede expresar por la relación de las longitudes de sus ejes menor y mayor.

Fig3
Asimetría en un objeto de imágen.
Esta característica se rige por parámetros como la varianza en x (Var X) y la varianza en y (Var Y), parámetros que dan lugar a la expresión (1):

Ecuación1
Ecuación
Concluye así de esta manera el proceso de segmentación y clasificación de objetos en la imagen; dando lugar a la exportación a formato Shape (.SHP) para la posterior evaluación de la segmentación.
Luego de haber detectado cada objeto en la imagen, se procede a la clasificación de los mismos, a través de la dirección principal (Figura 5), característica que se define como la dirección del vector propio que pertenece al mayor de los dos valores propios, derivado de la matriz de covarianza de la distribución espacial del objeto de imagen.
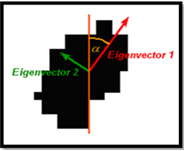
Fig4
Dirección principal de un objeto de imagen.
1.3. Procesamiento de las imágenes con deterioros del tipo deformaciones
Creación del Perfil del pavimento mediante el software GlobalMapper
Para la creación del perfil del pavimento se utilizó el software GlobalMapper, que es una herramienta fundamental en los trabajos geográficos. Una vez obtenido el modelo digital de superficie y el ortomosaico por el procesamiento fotogramétrico, los cuales se emplean la obtención de los perfiles longitudinales con sus desniveles representados en el mismo.
En la ortofoto aparece una marca que fue hecha previamente en el pavimento y en esta se marca el punto 0 y a los 10 m marcamos el punto 1 con las herramientas que nos brinda el GlobalMapper. Teniendo los 2 puntos marcados creamos una línea uniendo el punto 0 y el punto 1 (Figura 5).
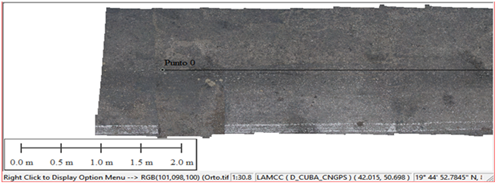
Fig5
Creación de la línea.
Mediante las herramientas del GlobalMapper creamos líneas perpendiculares espaciadas cada 50 cm sobre la línea anteriormente realizada (Figura 6), a estas líneas perpendiculares le damos un ancho de 1,6m para que esté de acuerdo con los trabajos realizados en el campo.
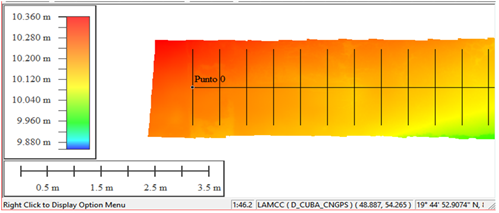
Fig6
Líneas perpendiculares para trazar los perfiles.
Con el modelo digital de superficie, obtenido mediante la fotogrametría, y con las líneas perpendiculares creadas anteriormente, seleccionamos las secciones de la primera a la última y marcamos una opción llamada Phat Profile la cual genera un perfil a lo largo de la línea especificada (Figura 7).
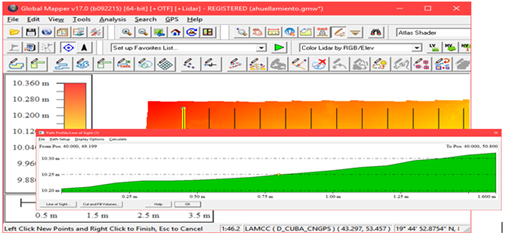
Fig7
Generación de los perfiles.
Generar modelo de pendientes
Como primer paso y con el objetivo de acentuar aún más la información que nos brinda el MDS y discriminar mejor las grietas de otras marcas superficiales que pudieran existir sobre el pavimento, como señales del tránsito, marcas de neumáticos, manchas de grasa, etc., generamos a partir del MDS el modelo de pendientes. Como algoritmos escogemos Surface calculation, y Slope, como banda de entrada la banda 4, correspondiente al MDS y como banda de salida Slope. Una vez creado el modelo de pendientes, este figura como banda 5. Como ya hemos planteado, el método de segmentación que emplearemos será el de Segmentación por multiresolución, ya que es el que mejor se adapta a este tipo de proyecto y por ende donde se obtienen los mejores resultados. Se establecieron otros parámetros: como dominio pixel level, como nombre del nivel, establecemos Primer Nivel, a las cinco bandas le establecemos como peso la unidad y los parámetros de escala, forma y compacidad, lo establecemos en 100, 0.1 y 0.5 respectivamente. A continuación, se muestra un detalle de la imagen con el resultado de la segmentación superpuesto al ortomosaico (Figura 9).
2. RESULTADOS Y DISCUSIÓN
2.1. Análisis de los resultados obtenidos para la detección y clasificación de grietas
Creación de un nuevo proyecto e importación de los datos iniciales
Como materiales de partida, constamos con un ortomosaico, con tres bandas espectrales (RGB) y un Modelo Digital de Superficie (MDS), con una sola banda, que contiene las irregularidades de la superficie del pavimento. Ambos productos, son el resultado del procesamiento fotogramétrico de las imágenes capturadas sobre el pavimento, están en formato TIFF y tienen una resolución espacial de 1 mm.
Como primer paso, se crea un nuevo proyecto, nombrándolo convenientemente e importando las diferentes bandas de entrada (3 del ortomosaico y 1 del MDS). Es importante que el orden de las bandas sea: primero las tres bandas del ortomosaico (banda 1 – rojo, banda 2 – verde y banda 3 – azul) y como banda 4 el MDS, ya que los diferentes procedimientos se diseñaron siguiendo este orden. La siguiente figura muestra un detalle del ortomosaico importado (Figura 8).

Fig8
eCognition con el nuevo proyecto creado.
Detectar grietas
En el siguiente paso utilizaremos las potencialidades de clasificación orientada a objetos que presenta eCognition, para clasificar todas las posibles grietas presentes en el pavimento analizado, y agruparlas en una clase denominada Grietas, para posteriormente clasificarlas de acuerdo a su tipo. El algoritmo escogido es clasification, como primera condición se escoge el rasgo geométrico Asymmetry y su umbral se establece en mayores de 0.9, como segunda condición se escoge el valor medio de la pendiente, estableciendo el umbral a valores medios superiores a 0.5 y como clase activa, se crea una nueva clase denominada Grietas. Este algoritmo de clasificación, compara las características de cada uno de los objetos de imagen, obtenidos en la segmentación, con las condiciones establecidas, agrupando aquellos que cumplan ambas condiciones en la clase activa. En la figura siguiente se expone el resultado del paso, la figura muestra un detalle de la imagen, con la clase Grietas (Color amarillo) superpuesta al ortomosaico (Figura 10).
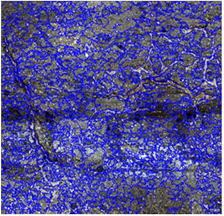
Fig9
Resultado de la segmentación de la imagen.
Generar modelo de pendientes
Como primer paso y con el objetivo de acentuar aún más la información que nos brinda el MDS y discriminar mejor las grietas de otras marcas superficiales que pudieran existir sobre el pavimento, como señales del tránsito, marcas de neumáticos, manchas de grasa, etc., generamos a partir del MDS el modelo de pendientes. Como algoritmos escogemos Surface calculation, y Slope, como banda de entrada la banda 4, correspondiente al MDS y como banda de salida Slope. Una vez creado el modelo de pendientes, este figura como banda 5. Como ya hemos planteado, el método de segmentación que emplearemos será el de Segmentación por multiresolución, ya que es el que mejor se adapta a este tipo de proyecto y por ende donde se obtienen los mejores resultados. Se establecieron otros parámetros: como dominio pixel level, como nombre del nivel, establecemos Primer Nivel, a las cinco bandas le establecemos como peso la unidad y los parámetros de escala, forma y compacidad, lo establecemos en 100, 0.1 y 0.5 respectivamente. A continuación, se muestra un detalle de la imagen con el resultado de la segmentación superpuesto al ortomosaico (Figura 9).
Detectar grietas
En el siguiente paso utilizaremos las potencialidades de clasificación orientada a objetos que presenta eCognition, para clasificar todas las posibles grietas presentes en el pavimento analizado, y agruparlas en una clase denominada Grietas, para posteriormente clasificarlas de acuerdo a su tipo. El algoritmo escogido es clasification, como primera condición se escoge el rasgo geométrico Asymmetry y su umbral se establece en mayores de 0.9, como segunda condición se escoge el valor medio de la pendiente, estableciendo el umbral a valores medios superiores a 0.5 y como clase activa, se crea una nueva clase denominada Grietas. Este algoritmo de clasificación, compara las características de cada uno de los objetos de imagen, obtenidos en la segmentación, con las condiciones establecidas, agrupando aquellos que cumplan ambas condiciones en la clase activa. En la figura siguiente se expone el resultado del paso, la figura muestra un detalle de la imagen, con la clase Grietas (Color amarillo) superpuesta al ortomosaico (Figura 10).

Fig10
Resultado de la detención de grietas.
Clasificar grietas
Una vez agrupadas todas las grietas en una misma clase, y aisladas del resto de los objetos contenidos en la imagen del pavimento, podemos separarlas y clasificarlas en Grietas longitudinales o Grietas transversales, de acuerdo a su orientación o dirección principal. Para la clasificación de las grietas longitudinales, al tratarse de un intervalo continuo (> 45, < 135), se puede realizar en un solo procedimiento, mientras que para las grietas transversales existen dos procedimientos, uno para clasificar los objetos ≤ 45 y el otro para los ≥ 135. El algoritmo de clasificación, compara las características de cada uno de los objetos de la clase Grieta Longitudinal, obtenida en el paso anterior, con las condiciones establecidas, agrupando aquellos que cumplan ambas condiciones en la clase activa. Los procedimientos para clasificar las grietas transversales se aplican uno a continuación de otro y en ambos se establece como clase activa, la clase Grieta Transversal. En la figura siguiente se expone el resultado de la clasificación final de las grietas presentes en el tramo de pavimento analizado, la figura muestra un detalle de la imagen, con las clases Grieta Longitudinal (Color verde) y Grieta Transversal (Color rojo) superpuestas (Figura 11).
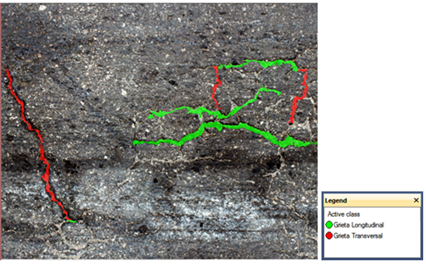
Fig11
Resultado final de la clasificación de las grietas
Exportar los resultados
Por último, podemos exportar los resultados de la clasificación de las grietas presentes en el pavimento analizado, tanto en formato ráster como en formato vectorial, para ser analizados y tratados en otros softwares. También pueden generarse reportes estadísticos sobre cada una de las clases lo que permite realizar disimiles análisis y confección de documentos gráficos sobre el estado superficial del pavimento analizado. La siguiente figura nos muestra el cuadro de diálogo para exportar los resultados a formato (.SHP) (Figura 12).
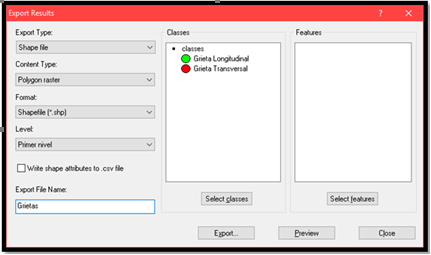
Fig12
Exportación de los resultados.
2.2. Análisis de los resultados obtenidos para las deformaciones
Resultados obtenidos de los perfiles en las diferentes estaciones
A continuación, se muestra una tabla que recoge las elevaciones de puntos espaciados a 10 cm en cada una de las estaciones (Tabla 1), según la información generada por los perfiles.
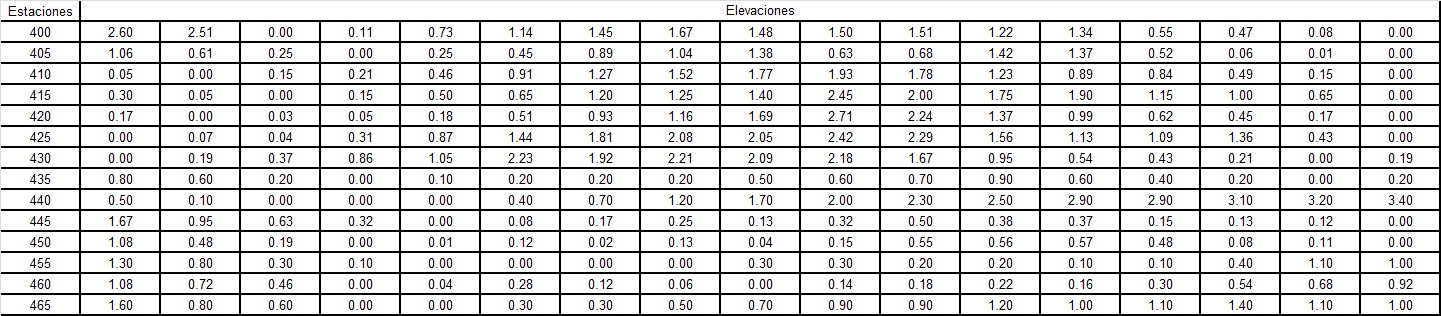
Tabla1
Elevaciones de los puntos en cada estación.
Tabla elevaciones.
Los perfiles demuestran claramente la presencia de deformaciones en el pavimento. Seguidamente se muestran ejemplos de perfiles para las estaciones 400 y la 495 (Figuras 13 y 14)

Fig13
Perfil de la estación 400.
Perfil 400

Fig14
Perfil de la estación 495.
3. CONCLUSIONES
eCongnition constituye una potente herramienta de clasificación orientada a objeto y quedando demostrada su factibilidad para detectar y clasificar de manera automática grietas presentes en los pavimentos. Resulta de vital importancia la correcta parametrización de los diferentes procedimientos, ya que de ello depende, en alto grado los resultados que se obtengan.
Por otra parte, los resultados obtenidos en los perfiles, demuestran la validación del procesamiento fotogramétrico para la detección de deformaciones en el pavimento.
Automatic road crack segmentation using entropy and image dynamic thresholding. in Signal Processing Conference
Oliveira, H. and P.L. Correia. Automatic road crack segmentation using entropy and image dynamic thresholding. in Signal Processing Conference, 2009 17th European. 2009. IEEE.
Hu, Y., C.-x. Zhao, and H.-n. Wang, Automatic pavement crack detection using texture and shape descriptors. IETE Technical Review, 2010. 27(5): p. 398-405.
Zhang, P. and H. Li. Recognition of pavement surface crack. in Natural Computation (ICNC), 2010 Sixth International Conference on. 2010. IEEE.
Wei, N., et al. Beamlet transform based pavement image crack detection. in Intelligent Computation Technology and Automation (ICICTA), 2010 International Conference on. 2010. IEEE.
Youquan, H., et al. Studying of road crack image detection method based on the mathematical morphology. in Image and Signal Processing (CISP), 2011 4th International Congress on. 2011. IEEE.
Zou, Q., et al., CrackTree: Automatic crack detection from pavement images. Pattern Recognition Letters, 2012. 33(3): p. 227-238.
García-Carrasco, U., Detección y evaluación de daños en pavimento asfáltico mediante procesamiento de imágenes digitales. Revista de Aplicación Científica y Técnica, 2015. Vol.2: p. 12-18.
Referencias
Ramírez Jiménez, S.M., Detección de grietas en la cinta asfáltica mediante análisis de imágenes. 2012.
Notas