Artículos originales
About Lie algebra classification, conservation laws, and invariant solutions for the relativistic fluid sphere equation
Acerca de la clasificación del álgebra de Lie, leyes de conservación y soluciones invariantes para la ecuación de la esfera de fluidos relativista
About Lie algebra classification, conservation laws, and invariant solutions for the relativistic fluid sphere equation
Revista Integración, vol. 41, no. 2, pp. 83-101, 2023
Universidad Industrial de Santander
Received: 25 February 2023
Accepted: 30 September 2023
Abstract:
The optimal generating operators for the relativistic fluid sphere equation have been derived. We have characterized all invariant solutions of this equation using these operators. Furthermore, we have introduced variational symmetries and their corresponding conservation laws, employing both Noether’s theorem and Ibragimov’s method. Finally, we have classified the Lie algebra associated with the given equation.
MSC2010:35A30, 58J70, 76M60.
Keywords: Optimal algebra, Invariant solutions, Lie algebra classification, Lie symmetry group, Ibragimov’s method, Noether’s theorem, Conservation laws, Variational symmetries.
Resumen: Se han derivado los operadores generadores óptimos para la ecua-ción de la esfera de fluido relativista. Hemos caracterizado todas las solucio-nes invariantes de esta ecuación utilizando dichos operadores. Además, hemos introducido simetrías variacionales y sus correspondientes leyes de conserva-ción, empleando tanto el teorema de Noether como el método de Ibragimov. Finalmente, hemos clasificado el álgebra de Lie asociada a la ecuación dada.
Palabras clave: Álgebra óptima, Soluciones invariantes, Clasificación de las álgebras de Lie, Grupo de simetría de Lie, Método de Ibragimov, Teorema de Noether, Leyes de conservación, Simetrías variacionales.
1. Introduction
The Lie group symmetry method emerges as a potent tool employed for the analy-sis of differential equations (DEs), encompassing both ordinary differential equations (ODEs) and partial differential equations (PDEs), as well as fractional differential equa-tions (FDEs) and various other equation types. This theory, originating in the 19th century by the mathematician Sophus Lie [1], follows in the footsteps of Galois theory within the realm of algebra. The application of the Lie group method to differential equations has engendered considerable interest across a spectrum of scientific disciplines, including pure mathematics and both theoretical and applied physics. This stems from the invaluable physical interpretations it affords to the scrutinized equations. Conse-quently, this approach facilitates the construction of conservation laws, employing, for instance, the renowned Noether’s Theorem [2], and even symmetry solutions, a feat unattainable through conventional methods.
Moreover, this method contributes to the formulation of frameworks and the assessment of numerical methods, among other applications [3, 4, 5]. Present-day Lie symmetries have undergone extensive scrutiny, as evidenced by the comprehensive body of work available in the literature [6, 7, 8, 9, 10].
Within the study of the diffusions, specifically in the study of a relativistic fluid sphere by considering the so-called isotropic metric, Buchdahl [11] obtained the equation

the solution of which is,

In [12], the first three integrals of (1) are presented using the Prelle-Singer method. In [13], first integrals of (1) are also derived by employing the relation between sym-metries and extending the Prelle-Singer method. In [14], the first integrals of (1) are obtained through an extension of the Prelle-Singer method. All of the aforementioned authors have arrived at the same solution for (1)

where I1 and I2 are first integrals. It is worth noting that (2) and (3) are equivalent when the constants are arranged accordingly. In [15], Zaitsev and Polyanin present a solution to (1)

The primary objectives of this article are as follows: We will begin by presenting the 5 dimensional Lie symmetry group for (1), offering a comprehensive description of its computation. Next, we will utilize this Lie symmetry group to introduce an optimal system, also known as an optimal algebra, for (1). Using the elements of the optimal system, we will then proceed to derive invariant solutions for (1). Following this, we will construct the Lagrangian associated with equation (1), based on the calculated group of symmetries. This will enable us to determine variational symmetries through the application of Noether’s theorem, ultimately leading to the presentation of associated conservation laws. Furthermore, we will employ Ibragimov’s method to establish non-trivial conservation laws. Finally, leveraging the group of symmetries we have identified, we will undertake the classification of the Lie algebra associated with (1).
2. About the Lie group symmetries for relativistic fluid sphere equa-tion.
The purpose of this section is to determine for (1) the group of Lie symmetries. This objective is explained in the following proposition
Proposition 2.1. The Lie group of symmetries for theequation (1)consists of the fol-lowing elements:

And Γ5 = x2y3
Proof. The general form for the generator operators of a Lie group with an admissible parameter for (1) is as follows:

where is the group parameter. The vector field associated with this group of transfor-mations is given by:

with ξ and η being differentiable functions in ℝ2. To calculate the infinitesimals η and ξ in (6), we employ the second extension operator

to the equation (1), resulting in the following symmetry condition:

where η [x] and η[xx] are the coefficients in Γ2 given by:
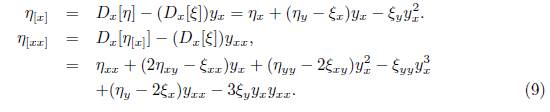
where Dx is the total derivative operator: Dx = ∂x + yx∂y + yxx∂yx + .
After applying (9) to (8) and substituting the resulting expression for yxx with (1), we obtain the following:

after analyzing the coefficients in regard to the independent variables yx3; yx2; yx; 1 we get the following system of determining equations:
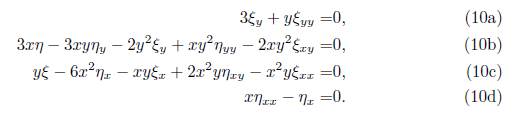
Solving in (10a) and (10d) we get

Using these equations in (10b) and (10c) to solve for c1(x); c2(x); c3(y), and c4(y), we obtain the following:
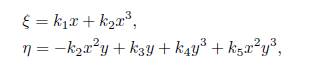
where k1; k2; k3; k4, and k5 are arbitrary constants. Thus, by usingand in the operator (6) and grouping the constants, we obtain Γ1 through Γ5, which constitute the generators of the symmetry group for the equation (1), as proposed in the statement of Proposition 2.1.
3. About optimal system
Considering [16, 18, 19, 20, 21, 17], we will now present the optimal system for (5). To determine the optimal algebra, it is essential to first obtain the corresponding commutator table. This can be calculated using the following operator:

where i = 1; 2, with α, β = 1; …; 5 and ξiα; ξiβ are the corresponding coefficients of the Γα, Γβ:
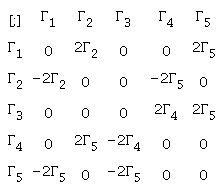
In Table 1, we present the results obtained by applying the operator (11) to the symmetry group (1).
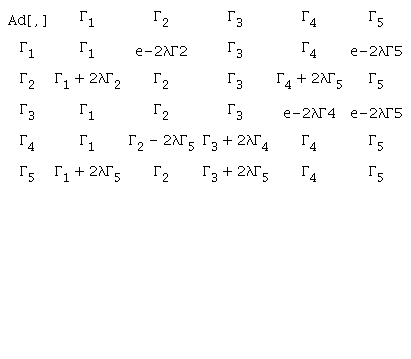
Following the objective for determining the optimal algebra, we must now obtain the ‘Adjoint Representation’ using Table 1 and the next operator (Ad):

In Table 2, we display the adjoint representation for each Γ i, with each entry in this table calculated using the operator mentioned above.
Proposition 3.1. The vector fields that represent the optimal algebra associated with the equation (1) are as follows:
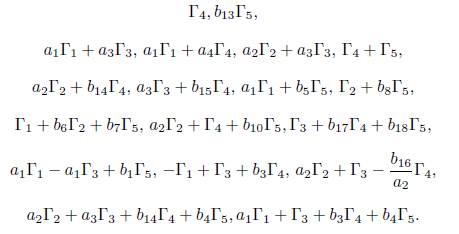
Proof. Considering the generic operator G, which is a linear combination of the symmetry group (5). Let

Using the adjoint operator (Ad) in G and the elements from Table 2, we can simplify the coefficients αi as much as possible, which will be our goal at every step of this proof.
1) Assuming α5 = 1 in (12) we have that G = α1Γ1 + α2Γ2 + α3Γ3 + α4Γ4 + Γ5. Using the adjoint operator to (Γ1; G) and (Γ3; G) no reductions are available, but applying the adjoint operator to (Γ2; G) we obtain

1.1) Case α1 # 0. applying λ1 = with α1 # 0, in (13), Γ2 is eliminated, therefore G1 = α1Γ1 + α3Γ3 + α4Γ4 + b1Γ5, where b1 = 1 - . Now, using the adjoint operator to (Γ4, G1), we obtain G2 = Ad (exp (λ2 Γ4)) G1 = α1Γ1 + α3Γ3 + (α4 + 2α3λ2) Γ4 + b1Γ5.
1.1.A) Case α3 # 0. Using λ2 =, with α3 # 0, is eliminated Γ4, then G2 = α1Γ1+ α3Γ3 + b1Γ5. Using the adjoint operator to (Γ5, G2), we obtain

1.1.A.A1) Case α1 + α3 # 0. Using λ3= - , with α1 + α3 # 0, in (14), Γ5 is eliminated, therefore G3 = α1Γ1+ α3Γ3. This is how the first optimal element appears

Then, we obtain the first reduction of the generic element (12).
1.1. A.A2) Case α1 + α3 = 0. We get in (14), G3 = α1Γ1 - α1Γ3 + b1Γ5. This is how the other optimal element appears

Then, we obtain one more reduction of the generic element (12).
Case α3 = 0. We get, G2 = α1Γ1 + α4Γ4 + b1Γ5. Now, applying the adjoint operator to (Γ5,G2), we have G15 = Ad (exp(λ15Γ5)) G2 = α1Γ1 + α4Γ4 + (b1 + 2α1λ15)Γ5. Then, as Γ1 = 0, we can substitute λ15 = , then Γ5 is removed, then an another item of the optimal algebra is

1.2) Case α1 = 0. Now, we have, G1 = α2Γ2 + α3Γ3 + Γ4 + (1 + 2α4λ1)Γ5.
1.2. A) Case α4 # 0. Using λ1 = with α4 # 0, Γ5 is removed, therefore G1= α2Γ2 + α3Γ3 + Γ4. Now, applying the adjoint operator to (Γ4, G1), we get

1.2.A.A1) Case α3 # 0. Using λ16 = with α3 # 0, Γ4 is eliminated, therefore G16 = α2Γ2 + α3Γ3 + b9Γ5, where b9 = . Now, using the adjoint operator to (Γ5,G16), we obtain

Then, α3 # 0, we can substitute λ17 = , then Γ5 is removed, after we get other item

1:2:A:A2) Case α3 = 0. We get in (18), G16 = α2Γ2 + Γ4 - 2 α2λ16Γ5.
1:2:A:A2:1) Case α2 6= 0. Applying λ16= with α2 # 0, we get G16 = α2Γ2 + Γ4 + b10Γ5. Now, applying the adjoint operator to (Γ5;G16), it is not possible to further reduce, this is how the other optimal element appears:

1:2:A:A2:2) Case α2 = 0. We have G16 = Γ4. Now, using the adjoint operator to (Γ5;G16), Therefore, there are no reductions, this is how the other optimal element appears:

1:2:B) Case α4 = 0. We get, G1 = α2Γ2 + α3Γ3 + Γ4 + Γ5. Now, applying the adjoint operator to (Γ4;G1), we have

1:2:B:1) Case α3 # 0. Using λ19 = , with α3 # 0, Γ4 is eliminated, therefore G19 = α2Γ2 + α3Γ3 + b11Γ5, with b11 = 1 + . Now, using the adjoint operator to (Γ5;G19), we obtain

Then, as α3 # 0, we can substitute λ20 = , then Γ5 is removed, after we get other item of the optimal algebra

Then, we obtain one more reduction of the generic element (12).
1:2:B:2) Case α3 = 0. We have in (22), G19 = α2Γ2 + Γ4 + (1 - 2α2λ19)Γ5.
1:2:B:2:A1) Case α2 # 0. Using λ19 = , with α2 # 0, Γ5 is eliminated, therefore G19 = α2 Γ2+Γ4. Now, applying the adjoint operator to (Γ5;G19), it is not posible to further reduce, this is how the other optimal element appears

1:2:B:2:A2) Case α2 = 0. We get G19 = Γ4 + Γ5. Now, applying the adjoint operator to (Γ5;G19), it is not possible to further reduce, this is how the other optimal element appears:

2) Assuming α5 = 0 and α4 = 1 in (12), we have that G = α1Γ1 + α2Γ2 + α3Γ3 + Γ4. Using the adjoint operator to (Γ1;G) and (Γ3;G) and there is no reduction, but applying the adjoint operator to (Γ2;G) we obtain

2:1) Case α1 # 0. Using λ4 = , with α1 # 0, in (27), Γ2 is eliminated, therefore G4 = α1Γ1 + α3Γ3 + Γ4+ b2Γ5, where b2 = λ4 = . Now, using the adjoint operator to (Γ4, G4), we obtain G5 = Ad (exp (λ5Γ4)) G4 = α 1Γ1 + α 3Γ3 + (1 + 2 α 3λ5)Γ4 + b2Γ5.
2.1.A) Case α3 # 0. Using λ5 = with α3 # 0, Γ4 is eliminated, therefore G5 = α 1Γ1 + α3Γ3 + b2Γ5. Now, using the adjoint operator to (Γ5, G5), we obtain G6 = Ad (exp (λ6Γ5)) G5 = α1Γ1 + α3Γ3 + (b2 + 2λ6(α1 + α3))Γ5
2:1:A:A1) Case α1 + α3 # 0. Using λ6 = with α1 + α3# 0, Γ5 is eliminated, therefore G6 = α1Γ1 + α3Γ3. This is how the other optimal element appears:

2.1.A.A2) Case α1 + α 3 = 0. we get G6 = α 1Γ1-α 1Γ3 + b2Γ5. This is how the other optimal element appears:

2.1.B) Case α3 = 0. We have G5 = α1Γ1 + Γ4 + b2Γ5. Now, applying the adjoint operator to (Γ5, G5), we have G21 = Ad (exp (λ21Γ5)) G5 = α1Γ1 + Γ4 + (b2 +2 α1λ21)Γ5. Then, as αa1 # 0, we can substitute λ21 = , then Γ5 is removed, after we get another item of the optimal algebra

2.2) Case α1 = 0. We have in (27), G4 = α2Γ2 + α3Γ3 +Γ4 + 2λ4Γ5, using λ4 = , get G4 = α2Γ2 + α3Γ3 + Γ4 + b13Γ5. Now, using the adjoint operator to (Γ4, G4), we obtain G21 = Ad (exp (λ21Γ4)) G4 = α2Γ2 + α3Γ3 + 2 α3λ21Γ4 +(b13 − 2α2λ21)Γ5.
2.2.A) Case α2 # 0. Using , with α2 # 0, Γ5 is eliminated, therefore G21 = α2Γ2 + α3Γ3 + b14, where b14 = . Now, using the adjoint operator to (Γ5, G21), we obtain

2:2:A:1) Case α3 # 0. It is clear that is not possible to further reduce, then using λ22 = , with α3 # 0, this is how the other optimal element appears:

Then, we obtain one more reduction of the generic element (12).
2:2:A:2) Case α3 = 0. We obtain G22 = α2Γ2 + b14Γ4. This is how the other optimal element appears:

2:2:B) Case α2 = 0. We have G21 = α3Γ3 + 2α3λ21Γ4 + b13Γ5.
2:2:B:1) Case α30. Using λ21 = , we get G21 = α3Γ3 + b15Γ4 + b13Γ5. Now, applying the adjoint operator to (Γ5, G21) we have

Then, as α 3 # 0, we can substitute λ23 = , then Γ5 is removed, after we get another item of the optimal algebra

2:2:B:2) Case α3 = 0. We have G21 = b13Γ5. Now, using the adjoint operator to (Γ5, G21), therefore, there are not any more reductions. This is how the other optimal element appears:

3)Assuming α4 = α5 = 0 and α3 = 1 in (12), we have that G = α1Γ1+ α2Γ2+Γ3. Using the adjoint operator to (Γ1, G) and (Γ3, G) there is no reduction, but applying the adjoint operator to (Γ2, G) we obtain

3:1) Case α1 # 0. Using λ7 = with α1 # 0, in (35), Γ2 is eliminated, therefore G7 = α1Γ1 + Γ3. Now, using the adjoint operator to (Γ4;G7), we obtain G8 = Ad (exp (λ8Γ1))G7 = α1Γ1 + Γ3 + 2λ8 Γ4. It is clear that is not possible to further reduce, then substituting λ8 = then G8 = α1Γ1 + Γ3 + b3Γ4. Using the adjoint operator to (Γ5;G8), we obtain

3:1:A) Case 1 + α1 # 0. It is clear that it is not possible to further reduce. Then substituting λ9= , this is how the other optimal element appears:

3:1:B) Case 1 + α1 = 0. We have G9 = - Γ1 + Γ3 + b3Γ4, then we have other element of the optimal algebra

3.2) Case α1 = 0. We have G7 = α2Γ2 + Γ3. Now, using the adjoint operator to (Γ4, G7), we get G24 = Ad (exp (λ24Γ4)) G7 = α2Γ2 + Γ3 + 2λ24Γ4 − 2a2λ24Γ5.
3.2.A1) Case α2 # 0. It is clear that is not possible to further reduce, then substituting λ24 = , we get G24 = α2Γ2 + Γ3 Γ4 + b16Γ5. Now, using the adjoint operator to (Γ5,G24), we obtain

Using λ25 = , Γ5 is removed, this is how the other optimal element appears:

3:2:A2) Case α2 = 0. We have G24 = Γ3 + 2λ24Γ4. Using λ24 = , we obtain G24 = Γ3 + b17Γ4. Now, using the adjoint operator to (Γ5; G24), we obtain

Thus, we do not get any more reduction, then using λ26 = this is how the other optimal element appears:

4) Using α3 = α4 = α5 = 0 and α2 = 1 in (12), we obtain that G = α1Γ1 + Γ2. Using the adjoint operator to (Γ1;G) and (Γ3;G) we conclude that there is no reduction, but using the adjoint operator to (Γ2;G) we obtain

4:1) Case α1 # 0. Using λ10 = with a1 # 0, in (40), Γ2 is eliminated, therefore G10 = α1Γ1. Now, applying the operator (Γ4;G10), it is clear that is not possible to further reduce, but using the adjoint operator to (Γ5;G10), we obtain G11 = Ad (exp (λ11Γ5))G10 = α1Γ1 + 2 α 1λ11Γ5. Thus, we do not get any more reduction, then using λ11= , this is how the other optimal element appears:

4:2) Case α1 = 0. We have G10 = Γ2. Now, using the operator (Γ5;G10), it is not possible to further reduce; however, by applying the adjoint operator to (Γ4;G10), we get

Thus, it is not possible to further reduce it, then using λ14 = , this is how the other optimal element appears:

5) Using α2 = α3 = α4 = α5 = 0 and α1 = 1 in (12), we obtain that G = Γ1. Applying the adjoint (Adj) to (Γ1;G) , (Γ3;G) and (Γ4;G) it is not possible to further reduce, but applying the adjoint operator to (Γ2;G) we obtain

it is not possible to further reduce, then substituting λ12 = we have that G12 = Γ1 + b6Γ2. Using the adjoint operator to (Γ5;G12), we obtain

It is not possible to further reduce, then substituting λ13 = , this is how the other optimal element appears:

4.About invariant solutions
We will characterize the invariant solutions using the operators from Proposition 3.1. To achieve this objective, we will apply the technique of the invariant curve condition ([17], Section 4.3; see also [22]), which is as follows:

An example will be presented below: by taking the element4 from Proposition 3.1 in (45), we get Q = η4 yxξ4 = 0, then (y3) yx(0) = 0, thus y(x) = 0, which is the trivial solution for (1).
Table 3 presents both implicit and explicit solutions obtained following the procedure described in the previous paragraph for each element of Proposition (3.1).
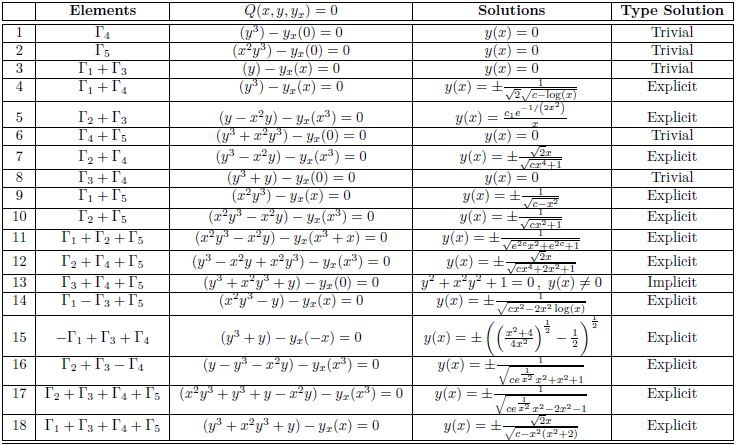
Remarks : Note that the solution in numeral 10 coincides with a particular solution presented in [11]. The solution in numeral 9 coincides with the solution presented in [12] and [14].
5.On the calculation of variational symmetries and the presentation of conserved quantities
We will calculate the variational symmetries of (1), and using Noether’s theorem [2], we will present the conserved quantities.
According to Nucci [23], our first step will be to use the Jacobi Last Multiplier method to calculate the inverse of the determinant Δ with the ultimate goal of obtaining the
Lagrangian.
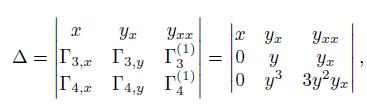
where Γ4,x, Γ4,y, Γ3,x, and Γ3,y are the components of the symmetries Γ3 and Γ4 presented in Proposition 5, and Γ41, Γ31 as their first prolongations. Then, we have ∆ = 2y3yx , thus M = =
. According to [23], M = Lyxyx, so Lyxyx =
 After integrating twice with respect to yx, we obtain the following Lagrangian:
After integrating twice with respect to yx, we obtain the following Lagrangian:

with arbitrary functions f1 and f2. In (46), consider f1 = f2 = 0. (Note: other Lagrangians can be calculated for (1) using different vector fields in Proposition 5). Thus, we obtain the following:

Applying (46) and (9), we have the following:
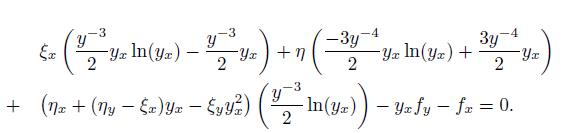
In the last equation, associating terms in regard to 1; yx; yx2 and yx3; and simplifying some terms we obtain the following determinant equations:
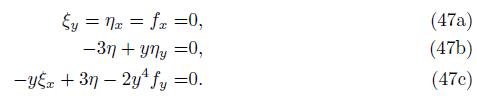
If we solve the system (47a), (47b) and (47c) for ; and f, we obtain the generators of the variational Noether’s symmetries, these solutions are

where α1; α2; α3 and a4 are constants. Thus, the Noether symmetry group or variational symmetries are

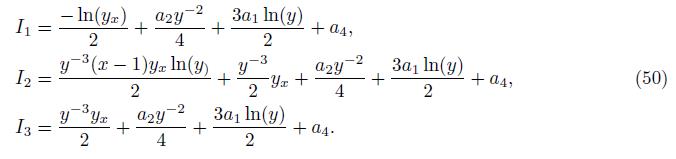
Remarks : Note that V1 = Γ4 and V2 = Γ1, this implies that, two of the symmetries of equation (1), are variational symmetries. If we follow what is proposed in [24], the way to calculate the conserved quantities is to solve the expression

so, using (46), (48) and (49). Therefore, the conserved quantities are given by
6. About Nonlinear Self-Adjointness
In this section, we present the main definitions in N. Ibragimov’s approach to nonlinear self adjointness of differential equations adopted to our specific case. For further details the interested reader is directed to [25, 26, 27].
Consider second order differential equation

with independent variables x and a dependent variable y, where y(1); y(2); y(s) the collection of 1; 2;…; s -th order derivatives of y:
Definition 6.1. Let ℒ be a differential function and = (x)-the new dependent variable, known as the adjoint variable or nonlocal variable [27]. The formal Lagrangian for ℒ = 0 is the differential function defined by

Definition 6.2. Let ℒ be a differential function and for the differential equation (51), denoted by ℒ[y] = 0, we define the adjoint differential function to ℒ by

and the adjoint differential equation by

where the Euler operator

and Dxi is the total derivative operator with respect to xi defined by

Definition 6.3. The differential equation (51) is said to be nonlinearly selfadjoint if there exists a substitution

such that

for some undetermined coefficient λ = λ(x, y, · · · ). If ν = φ(y) in (56) and (57), the equation (51) is called quasi self-adjoint. If ν = y, we say that the equation (51) is strictly self-adjoint.
Now we shall obtain the adjoint equation to the eq. (1). For this purpose we write (1) in the form (51), where

Then the corresponding formal Lagrangian (52) is given by

and the Euler operator (55) transfomed into:

Now, the explicit form of the operator (60), which was applied to ℒ, have the form (59).
Thus, we get the adjoint equation (54) for (1):

The following proposition presents the most important result of the current section.
Proposition 6.4. The following substitution (x; y) makes equation (1) nonlinearly self-adjoint

where k1; k2are arbitrary constants.
Proof. Substituting in (61), and then in (58), v= (x; y) and its respective derivatives, and comparing the corresponding coefficients we get five equations:
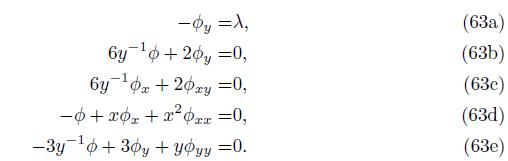
Now, we studies only Eqs. (63b),(63d) and (63e) because the Eq.(63c) is obtaned from
Eq.(63b) by differentiation with respect to x:
When solving the system (63a)-(63e) for we obtain

Then the proposition is proved.
7. About conservation laws
In this section, using the conservation theorem of N. Ibragimov in [27], we will establish some conservation laws for (1). Since the Eq. (1) is of second order, the formal Lagrangian contains derivatives up to order two. Thus, the general formula in [27] for the component of the conserved vector is reduced to

Where
j = 1; ; 5 the formal Lagrangian (59)
and ηj, ξj are the infinitesimals of a Lie group symmetry admitted by Eq. (1), stated in (5). From (1), (5) and (62) into (65) we get the following conservation vectors for each symmetry indicated in (5).
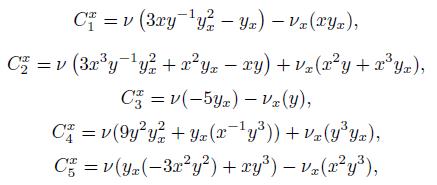
where = y-3 k1x-1 + k2x and vx = y-3 (k1x-1 + k2x)
8. Classification of Lie algebra
Using Levi’s theorem, it is possible to classify a finite-dimensional Lie algebra with char-acteristic 0. Also, this theorem makes it possible to deduce the existence of two important classes of Lie algebras: The solvable algebra and the semisimple algebra. As it is known, for the mentioned algebras, there are certain particularities, for example, within the soluble ones there are the Nilpotent Lie algebras.
If we look at the group of generators present in the Table 1, we get a five dimensional Lie algebra. A basic and classical way to classify a Lie algebra is by means of the Cartan-Killing form, which is denote as K(:;:), this form is expressed in accordance with the following propositions [28].
Proposition 8.1. (Cartan’s theorem) A Lie algebra is semisimple if and only if its Killing form is nondegenerate.
Proposition 8.2. A Lie subalgebra g is solvable if and only if K(X; Y ) = 0 for all X 2 [g; g] and Y 2 g. Other way to write that is K(g; [g; g]) = 0.
We also need the next statements to make the classification.
Definition 8.3. Let g be a finite-dimensional Lie algebra over an arbitrary field k. Choose a basis ej , 1 ≤ i ≤ n, in g where n = dim g and set [ei, ej ] = Cijkek . Then the coefficients Cijk are called structure constants.
Proposition 8.4. Let g1and g2be two Lie algebras of dimension n. Suppose each has a basis with respect to which the structure constant are the same. Then g1and g2are isomorphic.
Let be g the Lie algebra related to the group of infinitesimal generators of the equation (1). Analyzing the table of the commutators (Table 1), it is enough to consider the next relations:
[Γ1, Γ2] = 2Γ2, [Γ1, Γ5] = 2Γ5, [Γ2, Γ4] = -2Γ5, [Γ3, Γ4] = 2Γ4, [Γ3, Γ5] = -2Γ5.
The matrix form of the Cartan-Killing K representation is:
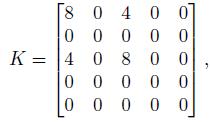
which the determinant vanishes, and thus by Cartan criterion it is not semisimple, (see Proposition 8.1). Since a nilpotent Lie algebra has a Cartan-Killing form that is identi- cally zero, we conclude, using the counter-reciprocal of the last claim, that the Lie algebra g is not nilpotent. We verify that the Lie algebra is solvable using the Cartan criteria to solvability, (Proposition 8.2), and then we have a solvable nonnilpotent Lie algebra. The Nilradical of the Lie algebra g is generated by Γ2, Γ4, Γ5, that is, we have a Solvable Lie algebra with three dimensional Nilradical. Let m the dimension of the Nilradical M of a Solvable Lie algebra. In this case, in fifth dimensional Lie algebra we have that 2 ≤ m ≤ 5. Mubarakzyanov in [29] classified the 5-dimensional solvable nonlilpotent Lie algebras, in particular the solvable nonnilpotent Lie algebra with three dimensional Nilradical, this Nilradical is isomorphic to h3 the Heisenberg Lie algebra. Then by the Proposition 8.4, and consequently we establish a isomorphism of Lie algebras with g and the Lie algebra g5,34 . In summery we have the next proposition.
Proposition 8.5. The 5-dimensional Lie algebra g related to the symmetry group of the equation (1) is a solvable nonnilpotent Lie algebra with three dimensional Nilridical. Besides that Lie algebra is isomorphich with g5;34in the Mubarakzyanov’s classification.
9. Conclusion
Utilizing the Lie symmetry group (see Proposition 2.1), we obtained the optimal algebra (see Proposition 3.1), applying these operators it was possible to determine all the in-variant solutions (see Table 3), with the exception of those presented in numerals 9 and 10, the rest of these solutions have not been presented so far in the literature.
We have presented the variational symmetries for (1) as described in (49), along with their respective conservation laws in (50). Additionally, by leveraging nonlinear self-adjointness (refer to Proposition 6.4), we have constructed non-trivial conservation laws using Ibragimov’s method (66). The Lie algebra associated with the equation (1) is a solvable non-nilpotent Lie algebra with a three-dimensional nilradical. Furthermore, this Lie algebra is isomorphic to g5;34 in Mubarakzyanov’s classification.
The objectives initially proposed for the Lie algebra classification of (1) have been ac-complished.
For future research, it would be valuable to explore the theory of equivalence groups, as it can facilitate preliminary classifications to structure a comprehensive classification of equation (1).
Acknowledgments
G. Loaiza, O.M.L Duque and Y.Acevedo are grateful to EAFIT University, Colombia, for the financial support in the project "Study and applications of diffusion processes of importance in health and computation" with code 11740052022.
References
Lie S., Theorie der Transformationsgruppen, Mathematische Annalen, vol. 2, 1970.
Noether E., “Invariante Variationsprobleme”, in Nachrichten der Königlichen Gesellschaft der Wissenschaften (Dieterich), vol. 2, 1918, 235-257. doi: 10.1007/978-3-642-39990-9_13
Kumar S., Dhiman S. K., Baleanu D., Osman M. S. and Wazwaz A., “Lie Symme-tries, Closed-Form Solutions, y Various Dynamical Profiles of Solitons for the Variable Coefficient (2+1)-Dimensional KP Equations”, Symmetry, 14 (2022), No. 3, 597. doi: 10.3390/sym14030597.
Yao R. and Lou S., “A Maple Package to Compute Lie Symmetry Groups and Symmetry Reductions of (1+1)-Dimensional Nonlinear Systems”, Chinese Physics Letters, 25 (1927), No. 6, 1927. doi: 10.1088/0256-307X/25/6/002.
Kumar S., Ma W. and Kumar A., “Lie Symmetries, Optimal System, and Group-Invariant Solutions of the (3+1)-Dimensional Generalized KP Equation”, Chinese Journal of Physics, 69 (2021), 1-23. doi: 10.1016/j.cjph.2020.11.013.
Bluman G. y Kumei S., Symmetries and Differential Equations, Springer, 1989, Applied Mathematical Sciences (81), New York, 1989.
Ovsyannikov L.V., Group Analysis of Differential Equations, Academic Press, New York, 1982.
Cantwell B.J., Introduction to Symmetry Analysis, Cambridge University Press, Cambridge Texts in Applied Mathematics, 2002.
Stephani H., Differential Equations: Their Solution Using Symmetries, Cambridge University Press, 1989.
Kumar S. and Dhiman S.K., “Lie Symmetry Analysis, Optimal System, Exact Solutions, and Dynamics of Solitons of a (3+1)-Dimensional Generalized (BKP) Boussinesq Equation”, Pramana, 96 (2022), No. 1. doi: 10.1007/s12043-021-02269-9.
Buchdahl H.A., “A Relativistic Fluid Sphere Resembling the Emden Polytrope of Index 5”, Astrophysical Journal, 140 (1964), 1512-1516. doi: 10.1086/148055.
Duarte L.G., Duarte S.E., da Mota L.A. and Skea J.E., “Solving Second Order Equations by Extending the Prelle Singer Method”, J. Phys. A: Math. Gen., 34 (2001), 3015-3039. doi: 10.1088/0305-4470/34/14/308.
Muriel C. and Romero J.L., “First Integrals, Integrating Factors, and -Symmetries of Second-Order Differential Equations”, J. Phys. A: Math. Theor., 42 (2009), 365207. doi: 10.1088/1751-8113/42/36/365207.
Chandrasekar V.K, Senthilvelan M. and Lakshmanan M., “On the Complete Integrability and Linearization of Certain Second-Order Nonlinear Ordinary Differential Equations”, Proc. R. Soc., 461 (2005), 2451-76. doi: 10.1098/rspa.2005.1465.
Polyanin A.D. and Zaitsev V.F., Exact Solutions for Ordinary Differential Equations, Chap-man and Hall/CRC, 2002. doi: 10.1201/9781315117638.
Olver P.J., Applications of Lie Groups to Differential Equations, Springer-Verlag, 1986. doi: 10.1007/978-1-4684-0274-2.
Hydon P.E. and Crighton D.G., Symmetry Methods for Differential Equations: A Beginner’s Guide, Cambridge University Press, Cambridge Texts in Applied Mathematics, 2000. doi: 10.1017/CBO9780511623967.
Kumar S. and Rani S., “Invariance Analysis, Optimal System, Closed Form Solutions, and Dynamical Wave Structures of a (2 + 1) Dimensional Dissipative Long Wave System”, Physica Scripta, 96 (2021), No. 12, 125202. doi: 10.1088/1402-4896/ac1990.
Zewdie G., “Lie Symmetries of Junction Conditions for Radiating Stars”, Thesis, University of KwaZulu-Natal, Durban, 2011. doi: 10.10413/9840.
Kumar S. and Rani S., “Symmetries of Optimal System, Various Closed-Form Solutions, and Propagation of Different Wave Profiles for the Boussinesq Burgers System in Ocean Waves”, Physics of Fluids, 34 (2022), No. 3. doi: 10.1063/5.0085927.
Hussain Z., “Optimal System of Subalgebras and Invariant Solutions for the Black-Scholes Equation”, Thesis, Blekinge Institute of Technology, Karlskrona, 2009.
Kumar S., Kumar D. and Wazwaz A., “Lie Symmetries, Optimal System, Group-Invariant Solutions, and Dynamical Behaviors of Solitary Wave Solutions for a (3+1)-Dimensional KdV-Type Equation”, The European Physical Journal Plus, 136 (2021), No. 5. doi: 10.1140/epjp/s13360-021-01528-3.
Nucci M.C. and Leach P.G., “An Old Method of Jacobi to Find Lagrangians”, Journal of Nonlinear Mathematical Physics, 16 (2009), No. 4, 431-441. doi: 10.1142/S1402925109000467.
Gelfand I.M. and Fomin S.V., Calculus of Variations, Dover Publications, New Jersey, 2000.
Gandarias M.L., “Weak Self-Adjoint Differential Equations”, Journal of Physics A: Mathematical and Theoretical, 44 (2011), No. 26. doi: 10.1088/1751-8113/44/26/262001.
Ibragimov N.H., “A New Conservation Theorem”, Journal of Mathematical Analysis and Applications, 333 (2007), No. 1, 311-328. doi: 10.1016/j.jmaa.2006.10.078.
Ibragimov N.H., “Nonlinear Self-adjointness in Constructing Conservation Laws”, Archives of ALGA, 7/8 (2011), 1-90. doi: 10.48550/arXiv.1109.1728.
Humphreys J., Introduction to Lie Algebras and Representation Theory, Springer New York, New York, 1972. doi: 10.1007/978-1-4612-6398-2.
Mubarakzyanov G.M., “Classification of Real Structures of Lie Algebras of Fifth Order”, Izv. Vyssh. Uchebn. Zaved, 3 (1963), No. 1, 99-106.
To cite this article: