Ciencia y tecnología
Modelamiento y control de un sistema de tráiler autónomo
Modeling and control of a self-contained trailer system
Modelamiento y control de un sistema de tráiler autónomo
Ingeniería Industrial, núm. 36, pp. 257-284, 2018
Universidad de Lima

Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial 4.0 Internacional.
Recepción: 05 Abril 2018
Aprobación: 15 Junio 2018
Resumen: Se propone una solución mediante un sistema de control de robot móvil tipo tráiler aplicado a una empresa que se encarga del transporte de material, y se demuestra que es una solución aplicable y viable. Se definió un modelo matemático que consiste en integrar dos técnicas de control: lineal LQR y lógica difusa. Se muestran resultados favorables del sistema de control y seguimiento de trayectoria, y se señalan las mejoras que se tienen al integrar ambas técnicas de control y que el sistema es capaz de responder correctamente a fin de guiar al robot por cualquier tipo de trayectoria.
Palabras clave: lógica difusa , control LQR , robots móviles , sistemas dinámicos no holonómicos.
Abstract: A solution is proposed by means of a trailer-type mobile robot control system applied to a company in charge of transporting material, demonstrating that it is an applicable and viable solution. A mathematical model was defined, involving the integration of two control techniques: linear quadratic regulator (LQR) and fuzzy logic. Favorable results of the trajectory control and tracking system are shown, pointing out the improvements achieved when integrating both control techniques and the ability of the system to respond correctly to guide the robot by any type of trajectory.
Keywords: fuzzy logic , LQR control , mobile robots , non-holonomic dynamical systems.
1. INTRODUCCIÓN
1.1 Robots móviles
Con el paso de los años, se ha ido observando un gran crecimiento en el uso de robots móviles tanto aéreos, terrestres y acuáticos en muchos ámbitos y áreas de investigación, con el fin de facilitar el acceso a lugares que resultan difíciles para un ser humano como transportar materiales en entornos complejos, analizar grandes áreas de manera autónoma, entre otras actividades.
El área de investigación, en el desarrollo de estos sistemas robóticos, se ha basado en el desarrollo de la estructura del robot de acuerdo con la aplicación que se le dará, la electrónica para controlar las partes y sensar el entorno en el cual se encuentra el robot y el aspecto más importante y de mayor desarrollo investigativo: la técnica de control. Esta última es la que permite al robot tener un comportamiento autónomo conociendo su entorno y logrando su objetivo de seguimiento de trayectoria. De esta manera no requiere el control manual de una persona que lo esté guiando a lo largo de su trayecto.
Dentro de los distintos modelos de vehículos móviles que existen, se encuentra el tipo tráiler, el cual viene siendo usado en diferentes campos de la industria, lo cual enfatiza su uso en el tema de entrega o transporte de material. La gran ventaja que tiene es que puede realizar labores de transporte de grandes cargas, lo cual incrementa su eficiencia de acuerdo con la cantidad de remolques conectados guiados por la parte de tracción. Sin embargo, los robots tipo tráiler tienen un muy complejo sistema de funcionamiento a controlar debido a su modelo no lineal, inestabilidad y no-holonómico, más aún en movimiento de retroceso, lo cual conlleva a que exista mucha investigación sobre cómo controlarlo mediante el análisis de movimiento que realiza. En la mayoría de investigaciones, el modelo cinemático utilizado es el que se considera un movimiento a baja velocidad y en el cual no hay deslizamiento de ruedas, con lo que el modelo es más práctico, por lo que, para esta investigación, se realiza el modelamiento sobre la base de un análisis geométrico.
Entre las diferentes técnicas de control utilizadas, la consideración se encuentra en la intención de querer controlar al robot en toda su región de funcionamiento o únicamente en una región local. Es así como este trabajo de investigación busca desarrollar una estrategia de control de un tráiler de dos cuerpos basado en un control lineal integrado con la lógica difusa, para así llevar al tráiler a la posición deseada o que llegue a seguir trayectorias lineales, circulares o sinusoidales y que limite el ángulo formado por ambos cuerpos para evitar que colapsen. De esta manera, poder aplicarlo al sistema autónomo de empresas como puertos o terminales de almacenamiento, que utilizan estos vehículos para realizar la carga y descarga de mercadería transportada y así automatizar el proceso, para que los tráilers funcionen automáticamente y sepan qué ruta tomar para llegar a los puntos de carga o descarga y así reducir el uso de personal únicamente para este proceso, que puede ser utilizado para otras actividades en paralelo, así como también reducir los riesgos que se pueden generar en una conducción manual, y brindar a la empresa mayor seguridad, eficacia, tiempo y más mano de obra disponible.
2. MODELAMIENTO DEL ROBOT MÓVIL TIPO TRÁILER
El desarrollo del modelamiento del tráiler se realiza a partir de un análisis geométrico, realizando un procedimiento de movimiento de retroceso en un pequeño intervalo de tiempo, generando así las condiciones de posición en un instante t y en un instante t + Δt. En la figura 1 se muestra como está compuesto el tráiler, que tiene en la parte frontal las ruedas de dirección y las ruedas de tracción, mientras que en la parte de la carga consiste únicamente de ruedas de giro libre.
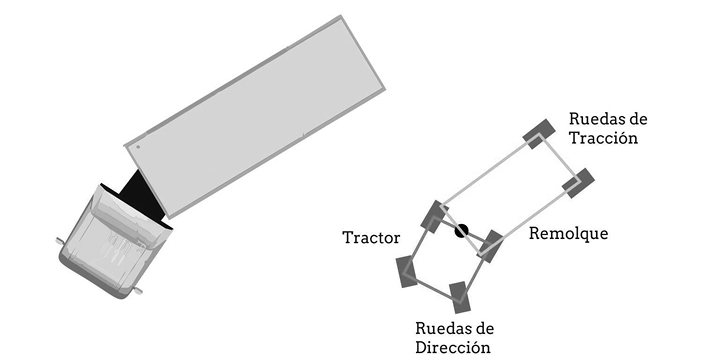
Figura 1
Robot móvil tipo tráiler
Elaboración propia
Considerando que las ruedas del lado derecho e izquierdo se mueven de igual manera, se realiza el análisis como si fueran dos barras, basado en el análisis del robot móvil tipo bicicleta como se muestra en la figura 2.
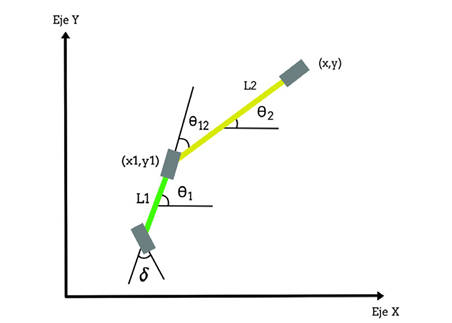
Figura 2
Análisis mediante el modelo tipo bicicleta
Elaboración propia
Primero se pasa a realizar el cálculo de las ecuaciones de las variables de posición; para esto, se analiza la figura 2.3 y se describe su posición luego de un instante de tiempo Δt de retroceso como en la siguiente figura 3:
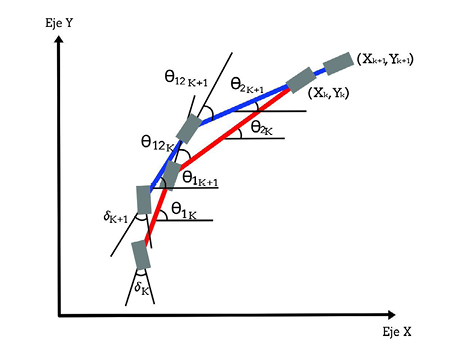
Figura 3
Análisis con movimiento en retroceso en uninstante de tiempo
Elaboración propia
Para obtener las ecuaciones del modelo del sistema, se realiza un análisis geométrico según los triángulos que se forman entre el cuerpo del tráiler en cada instante de tiempo, de tal manera que se analiza el triángulo formado por las ruedas de tracción en los puntos A y B y se traza un triángulo como en la figura 4:
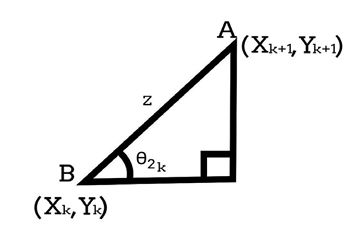
Figura 4
Primer triangulo para análisis del modelo matemático del tráiler
Elaboración propia
Donde z viene a ser la distancia recorrida en un instante de tiempo Δt, con lo que se pueden generar las siguientes ecuaciones
 (2.1)
(2.1)
 (2.2)
(2.2)Mediante este procedimiento, se logra obtener las ecuaciones del sistema en tiempo discreto:
 (2.3)
(2.3)
 (2.4)
(2.4)
 [2.5)]
[2.5)]
 (2.6)
(2.6)
 (2.7)
(2.7)Pasando las ecuaciones del sistema de tiempo discreto a tiempo continuo:
 (2.8)
(2.8)
 (2.9)
(2.9)
 (2.10)
(2.10)
 (2.11)
(2.11)
 (2.12)
(2.12)3. DISEÑO DEL SISTEMA DE CONTROL AUTÓNOMO
3.1 Estrategia de control lineal
Teniendo definidas las ecuaciones de modelado del robot tipo tráiler, se debe pasar a definir las variables de estado a utilizar en el sistema de control. Considerando que el vehículo realiza un movimiento en retroceso a una velocidad c/onstante , se define el vector de estado q y la señal de control u:
, se define el vector de estado q y la señal de control u:
3.1.1 Linealización y Ley de Control
El problema a resolver es el hacer que el robot móvil tenga un control autónomo de su posición y siga una trayectoria deseada de tal manera que converja a un valor deseado, por lo que se propone una estrategia de control, en la cual se busca que el vehículo converja a un valor deseado en la posición  con una orientación horizontal
con una orientación horizontal  y luego simplemente moverlo de manera recta hacia una posición x*y detenerlo, lo cual permite que no se requiera el control autónomo del vehículo mediante la variable x.
y luego simplemente moverlo de manera recta hacia una posición x*y detenerlo, lo cual permite que no se requiera el control autónomo del vehículo mediante la variable x.
De esta manera, para realizar el diseño de la ley de control lineal del sistema, se considera linealizar el modelo para que trabaje en una pequeña vecindad de funcionamiento alrededor de los valores de orientación  Aplicando los valores deseados para la linealización, se obtienen las siguientes ecuaciones del modelo linealizado:
Aplicando los valores deseados para la linealización, se obtienen las siguientes ecuaciones del modelo linealizado:
 (3.1)
(3.1)
 (3.2)
(3.2)
 (3.3)
(3.3)Llevando dichas ecuaciones a un diagrama espacio-estado de la forma:
 (3.4)
(3.4)Se tiene el siguiente modelo espacio-estado basado en la forma linealizada:
 (3.5)
(3.5)Donde:
Teniendo el modelo linealizado, se procede a definir la ley de control que permita generar la señal de control adecuada para estabilizar el sistema a su valor deseado, el cual se busca que tenga la siguiente forma.
 (3.6)
(3.6)Donde k1, k2, k3 son las ganancias del controlador y sus valores deben ser calculados adecuadamente para garantizar una buena estabilización del sistema en lazo cerrado.
Antes de definir la técnica para el diseño del controlador, se debe verificar que el sistema es controlable, por lo que se debe analizar que la matriz de controlabilidad sea de rango completo (n = 3), igual a la cantidad de variables de estado del sistema. En caso contrario, el sistema no puede ser controlado.
Siendo la matriz de controlabilidad definida por:
 (3.7)
(3.7)Para realizar el cálculo de la matriz de controlabilidad, se reemplazan los valores constantes del modelo lineal: v=3m/seg, L1 = 2m, L2 = 2m, L2 = 4m, teniendo el siguiente sistema espacio-estado:
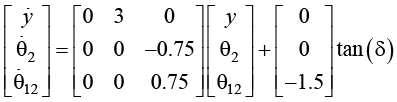 (3.8)
(3.8)Siendo:
La matriz de controlabilidad queda definida por:
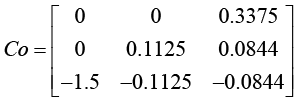
Y calculando el rango de la matriz:
Y, siendo coincidente con la cantidad de variables de estado, se concluye que el sistema es controlable en lazo cerrado.
3.2 Diseño de la lógica difusa
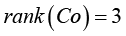
Se utiliza un controlador difuso aplicado al rango de variación del ángulo θ12 el cual es particionado en tres particiones, con lo que se busca poder tener un control indirecto del ángulo de acuerdo con la señal de control.
La forma con la cual se utilizará el controlador difuso es que, cuando el ángulo θ12 esté cercano a su punto de operación θ*12 = 0, funcione de manera normal el controlador LQR, pero, cuando el ángulo se esté disparando hacia sus extremos, forzar la señal de control de tal manera que lleve al ángulo θ12 de vuelta dentro del rango de su punto de operación.
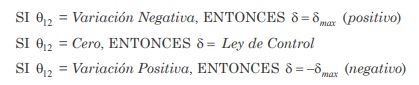
La función de pertenencia propuesta es la que se muestra en la figura 5:
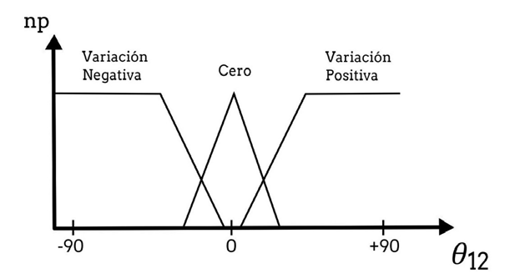
Figura 5
Función de pertenencia para el ángulo
Elaboración propia
La cual es diseñada sobre la base de analizar cómo varía el ángulo θ12 y qué efecto tendría la señal de control para cambiar su variación, y esto se puede apreciar en la figura 3.1, que al analizar se observa que, para que exista una variación positiva de θ12 , la señal de control debe ser positiva y, de igual manera, si se desea que la variación sea negativa, se requiere una señal de control negativa.
Entonces cuando el ángulo θ12 este variando positivamente, se requerirá generarle una variación negativa para que vuelva a su punto de operación, con lo que se tendría que aplicar una señal de control negativa, que significa aplicarle el máximo ángulo posible de giro de dirección en el sentido negativo y regresarlo cercano a cero; y lo mismo cuando ocurra una variación negativa, se requerirá generarle una variación positiva, con lo que se tendría que aplicar una señal de control positiva. Y se expresaría en la forma SI-ENTONCES:
De esta manera se estaría corrigiendo el problema del ángulo entre los dos cuerpos, que, para garantizar la mejor respuesta, simplemente se debe jugar con el rango de variación de las particiones, de acuerdo con el máximo ángulo que se desea que llegue θ12.
3.3 Pruebas de convergencia con el sistema de control híbrido
Para el control del tráiler se han integrado dos técnicas de control: una ley de control lineal alrededor de un punto de operación y la lógica difusa para controlar el ángulo de unión de los dos cuerpos del tráiler y evitar que supere un máximo y lo lleve hacia el punto de operación a trabajar.
A continuación, se realizan pruebas para analizar la respuesta del sistema de control utilizando LQR con lógica difusa. Para esto se define la siguiente función de pertenencia para el control del ángulo θ12 que se muestra en la figura 6.
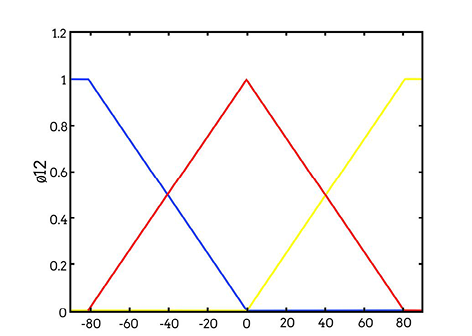
Figura 6
Función de pertenencia utilizada en el algoritmo de Matlab
Elaboración propia
3.4 Diseño de la función de pertenencia para la variable de posición
Debido a que los valores de las ganancias del controlador fueron calculados de acuerdo con su modelo lineal bajo un punto de operación y* = 0, ocurre que estas ganancias no funcionarán correctamente cuando la posición se encuentre alejada de dicho punto de operación, lo cual generará que no se tenga una respuesta óptima o se desestabilice el robot.
Para eso se propone el uso de particiones para la variable de posición del robot, de tal manera que para cada cierto rango de la posición y se le asignen unos valores de ganancia de controlador, y así funcionen correctamente para la posición del robot dentro del rango de la partición. El análisis parte de revisar el valor de la variable y, revisar la función de pertenencia y ver qué parámetros de ganancia corresponden de acuerdo con la partición correspondiente.
De esta manera se tendrían distintos valores de ganancia del controlador según la posición, los cuales deben ser calculador y probados para cada rango de la partición y así se solucionaría el problema.
Se propone una función de pertenencia de 7 particiones, como se muestra en la figura 7, donde cada partición contará con un grupo de parámetros de ganancias del controlador que serán simétricos de acuerdo con el punto de operación, los cuales deben ser generados variando los pesos hasta obtener una buena respuesta para cada partición.
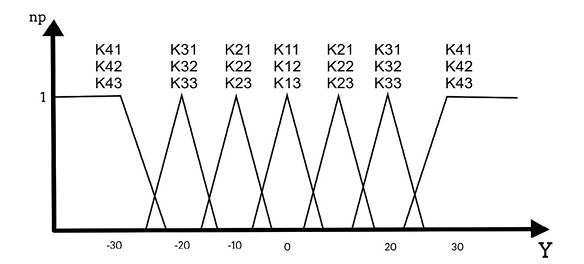
Figura 7
Modelo de la función de pertenencia para la variablede posición
Elaboración propia
En la figura 7, correspondiente a la función de pertenencia de la posición para corregir el problema de alejamiento del punto de operación, se observa que se definen las ganancias de controlador para cada partición, pero que son simétricas con su contraparte al otro lado del punto de operación.
El análisis de selección de las ganancias del controlador se da de acuerdo con qué partición corresponde la ubicación actual de Y, en la cual se utilizarían los niveles de pertenencia y el método de la media ponderada para así poder asignarle el valor adecuado.
4. CONTROL DEL ROBOT MÓVIL PARA SEGUIMIENTO DE TRAYECTORIAS
En el apartado anterior se vio cómo llevar al robot móvil a una convergencia con respecto a un valor deseado de valor constante. Ahora se propone el tema de seguimiento de trayectoria, en donde se definen dos tipos de trayectorias básicas: lineal y circular, y cuando se tiene una trayectoria diseñada como una función general, partiendo del análisis de una señal sinusoidal.
El objetivo para el seguimiento de trayectoria es poder definir correctamente los valores deseados para cada caso, de tal manera que permitan llevar al tráiler por dicha trayectoria, de modo que se deberán definir las ecuaciones correspondientes para cada valor deseado en cada tipo de trayectoria de acuerdo con un análisis geométrico que se realiza al conocer cómo debería ser el movimiento y qué parámetros están involucrados.
4.1 Trayectoria deseada lineal
En la figura 8 se puede observar cómo es la trayectoria lineal a seguir por el robot móvil y los parámetros a contemplar para el análisis de las variables deseadas requeridas.
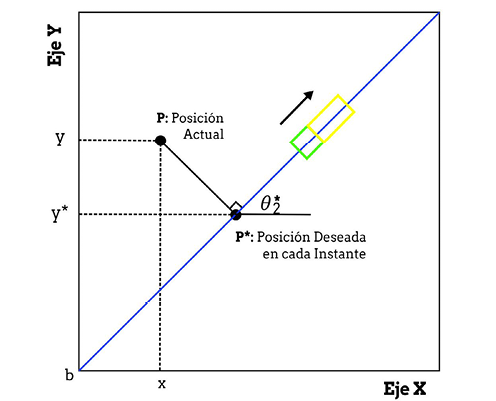
Figura 8
Trayectoria lineal y sus parámetros
Elaboración propia
Realizando el análisis geométrico, cogemos el triángulo en la figura 9 obtenido de la figura 9:
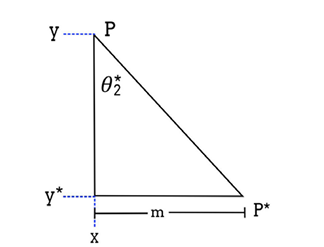
Figura 9
Primer triángulo para análisisde la trayectoria lineal
Elaboración propia
Se pueden obtener la siguiente ecuación:
 (4.1)
(4.1)Y analizando el siguiente triángulo de la figura 8:
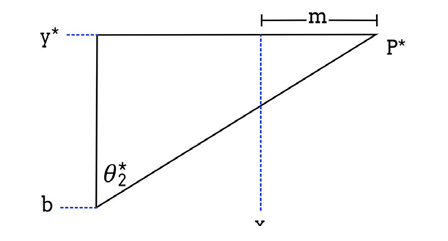
Figura 10
Segundo triángulo para análisis de la trayectoria lineal
Elaboración propia
Se puede generar la siguiente ecuación:
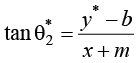 (4.2)
(4.2)Reemplazando (4.1) en (4.2) y despejando:
 (4.3)
(4.3)
 (4.4)
(4.4)Despejando con respecto a y*
 (4.5)
(4.5)Obteniendo el valor deseado de para una línea recta con pendiente igual a θ*2 .
4.2 Trayectoria deseada circular
En la figura 11, se puede observar cómo es la trayectoria circular a seguir por el robot móvil y los parámetros a contemplar para el análisis de las variables deseadas requeridas.
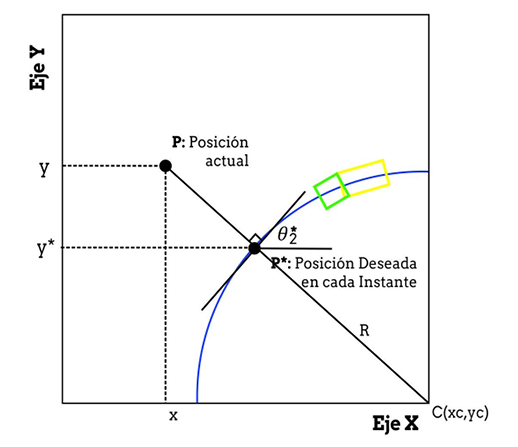
Figura 11
Trayectoria circular y sus parámetros
Elaboración propia
Realizando el análisis geométrico para la trayectoria circular, se toma en cuenta el triángulo indicado en la figura 11:
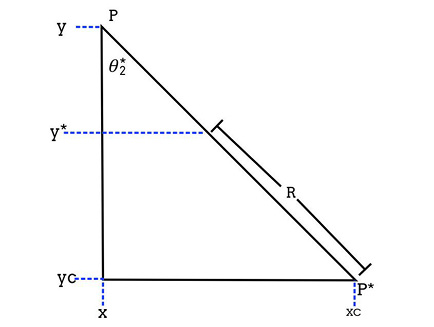
Figura 12
Triángulo para el análisis de latrayectoria circular
Elaboración propia
Del cual se pueden obtener las siguientes relaciones:
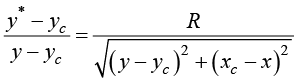 (4.6)
(4.6)Despejando la variable de posición deseada:
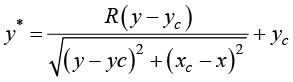 (4.7)
(4.7)También se obtiene:
 (4.8)
(4.8)Obteniendo los ángulos deseados:
 (4.9)
(4.9)
 (4.10)
(4.10)
 (4.11)
(4.11)En este caso es necesario obtener los valores deseados del ángulo  y
y  , ya que debido al movimiento circular que se daría por la trayectoria, estas variables, pese a ser constantes, requieren de un valor numérico específico de acuerdo con el tipo de movimiento circular dado.
, ya que debido al movimiento circular que se daría por la trayectoria, estas variables, pese a ser constantes, requieren de un valor numérico específico de acuerdo con el tipo de movimiento circular dado.
4.3 Trayectoria general
En este caso, se busca definir los valores deseados de las variables del sistema para que cumplan frente a cualquier tipo de trayectoria definida por una función matemática. Para poder encontrar las ecuaciones que cumplan con una función general, se realiza el análisis utilizando una función sinusoidal, con el objetivo que al final se reemplazase la función sinusoidal por una función general.
Utilizando la trayectoria sinusoidal de la figura 13:
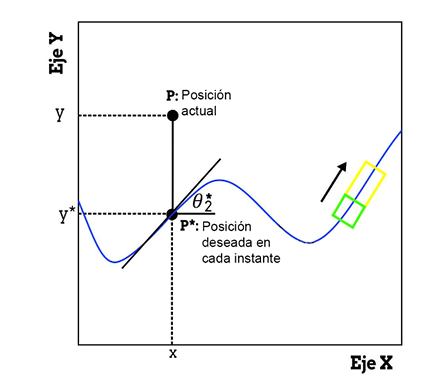
Figura 13
Trayectoria sinusoidal y sus parámetros
Elaboración propia
En este tipo de trayecto se define la trayectoria f (x), que sería una señal sinusoidal.
 (4.12)
(4.12)
 (4.13)
(4.13)
 (4.14)
(4.14)Dividiendo las ecuaciones (3.32) y (3.33), se obtiene:
 (4.15)
(4.15)
 (4.16)
(4.16)Observando que se puede calcular el ángulo θ2 sobre la base de dividir las derivadas de las posiciones, pero utilizando el criterio:
Se deriva (4.14) con respecto ax, resultando:
 (4.17)
(4.17)Reemplazando (4.17) en (4.16):
 (4.18)
(4.18)Despejando se obtiene la ecuación para el valor deseado de θ2:
 (4.19)
(4.19)Derivando (4.19) con respecto al tiempo:
 (4.20)
(4.20)Reemplazando (3.32) en (4.20);
 (4.21)
(4.21)Reemplazando (3.34) en (4.21):
 (4.21)
(4.21)Acomodando para despejar θ12:
 (4.22)
(4.22)
 (4.23)
(4.23)
 (4.24)
(4.24)Se obtiene la ecuación para el valor deseado de θ12 :
 (4.25)
(4.25)Derivando (4.25) con respecto al tiempo:
 (4.26)
(4.26)Reemplazando (3.32) y (3.34) en (4.26), se tiene:
 (4.27)
(4.27)Acomodando y despejando para obtener δ :
 (4.28)
(4.28)
 (4.29)
(4.29)
 (4.30)
(4.30)
 (4.31)
(4.31)
 (4.32)
(4.32)
 (4.33)
(4.33)
 (4.34)
(4.34)
 (4.35)
(4.35)
 (4.36)
(4.36)
 (4.37)
(4.37)
 (4.38)
(4.38)Sabiendo que:
 (4.39)
(4.39)Derivando con respecto a x se tiene que:
 (4.40)
(4.40)
 (4.41)
(4.41)
 (4.42)
(4.42)Por lo que se puede expresar las ecuaciones (4.19), (4.25), (4.38), de acuerdo con cualquier función dependiente de x, de tal manera que se tiene cuatro ecuaciones de referencia para las variables de estado y de control en función de cualquier tipo de trayectoria que pueda ser expresada en una función.
 (4.43)
(4.43)
 (4.44)
(4.44)
 (4.45)
(4.45)
 (4.46)
(4.46)5. PROPUESTA DE IMPLEMENTACIÓN DEL SISTEMA AUTÓNOMO
Debido a que se busca darle una aplicación industrial al sistema autónomo mediante robots móviles tipo tráiler, se propone la implementación en una empresa enfocada en el transporte de carga, para lo cual se deben tener los siguientes conocimientos previos del lugar a ser aplicado:
-
Área de funcionamiento.
-
Posiciones iniciales y finales donde se ubicarán los robots tipo tráiler.
-
La trayectoria a seguir.
-
Panel remoto de control para iniciar el proceso.
Con estas consideraciones, se debe realizar el análisis de implementación para obtener el funcionamiento esperado.
5.1 Simulación del proceso de la propuesta de implementación
Luego de tener definidas las etapas de funcionamiento, las coordenadas y trayectorias, se procede a realizar la simulación del proceso, de tal manera que se corrobore que es posible realizar el proceso de carga de inicio a fin permitiendo un correcto seguimiento de trayectoria del robot móvil tipo tráiler. Se realizan las siguientes pruebas, utilizando el algoritmo en Matlab, donde se varían las posiciones iniciales, posición de puerta de carga y posiciones finales para el recorrido del robot tipo tráiler.
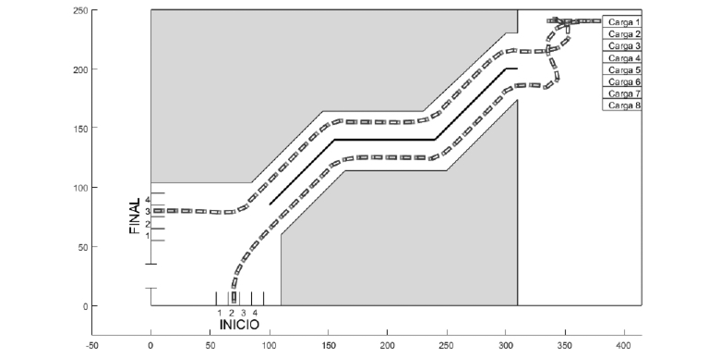
Figura 14
Prueba 1 – Recorrido total del robot tipo tráiler dentro de un almacén
Elaboración propia
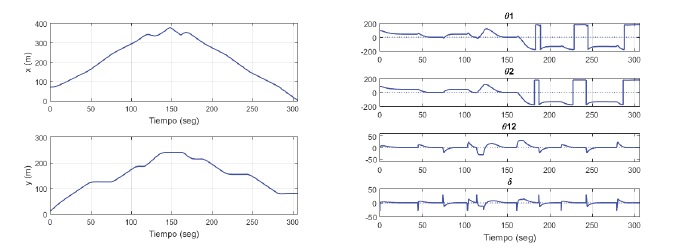
Figura 15
Prueba 1 - Variables del robot tipo tráiler durante el recorrido
Elaboración propia
Prueba 2:
Posición de estacionamiento inicial: 4
Puerta de carga: 5
Posición de estacionamiento final: 1
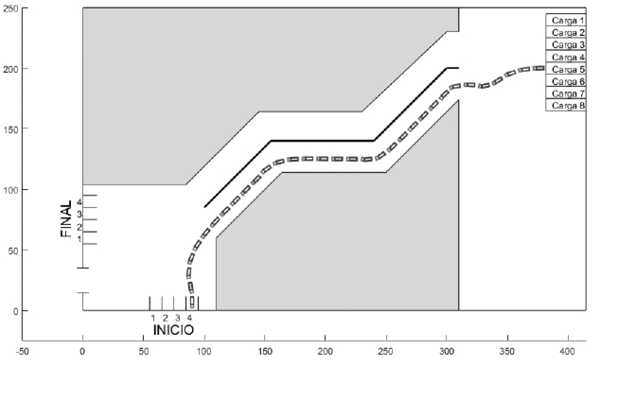
Figura 16
Prueba 2 - Recorrido de ida del robot tipo tráiler dentrode un almacén
Elaboración propia
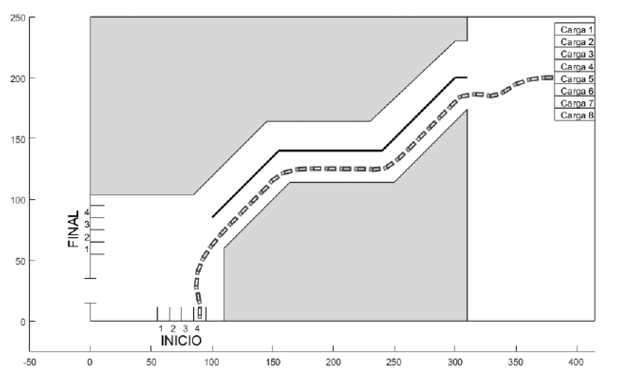
Figura 17
Prueba 2 - Recorrido de vuelta del robot tipo tráiler dentrode un almacén
Elaboración propia
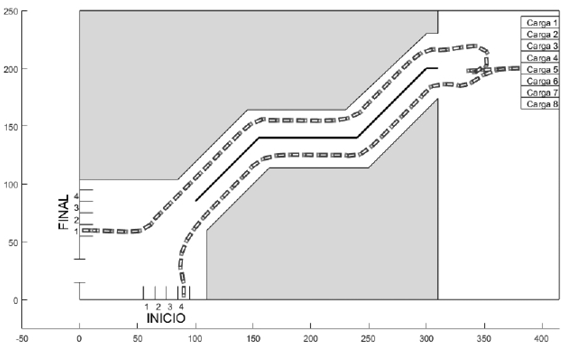
Figura 18
Prueba 2 – Recorrido total del robot tipo tráiler dentrode un almacén
Elaboración propia
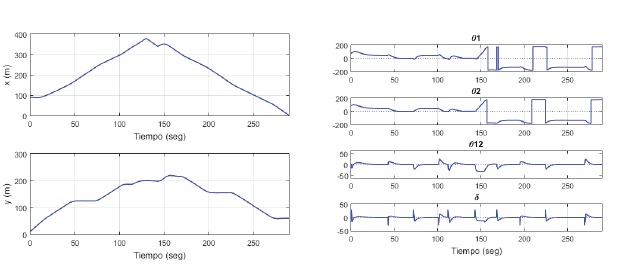
Figura 19
Prueba 2 - Variables del robot tipo tráiler durante el recorrido
Elaboración propia
En las pruebas se ha demostrado que es posible realizar la implementación del sistema autónomo utilizando robots tipo tráiler, de tal manera que puedan cumplir con el trabajo básico de realizar el proceso de carga o descarga de los contenedores, ya que, al utilizar el control para seguimiento de trayectoria, se puede guiar al robot móvil por cualquier tipo de ruta que pueda ser definida como función matemática, y que normalmente suelen ser rutas rectas o circulares.
6. CONCLUSIONES Y RECOMENDACIONES
-
Se diseñó de manera satisfactoria un sistema autónomo para el control y seguimiento de trayectoria de un robot tipo tráiler basado en controlador lineal y lógica difusa.
-
Se logró realizar el modelamiento de un robot móvil tipo tráiler de acuerdo con un análisis de movimiento en retroceso en un instante de tiempo, y se obtuvieron así las ecuaciones de modelado del robot.
-
Se diseñó un control lineal LQR basado en el modelo linealizado del robot móvil, el cual se realizó para puntos de operación cercanos a cero, y se permitió tener un buen control del robot móvil y poder llevarlo a sus valores deseados.
-
Se integró la lógica difusa aplicada al ángulo formado por los dos cuerpos del tráiler, de tal manera que solucione el problema de que dicho ángulo supere los límites permitidos, ya que el controlador lineal por sí solo no tenía un control directo.
-
De igual manera, se integró la lógica difusa aplicada a la variable de posición, de tal manera que, pese a haberse diseñado el controlador lineal para un punto de operación, el sistema sea capaz de trabajar correctamente para mayores rangos de la variable de posición, lográndolo gracias a que se definieron particiones por sectores de trabajo de la variable de posición y asignando a cada partición las ganancias del controlador adecuadas para un buen funcionamiento.
-
Se propusieron métodos para definir los valores de referencia para casos de trayectoria lineal o circular, definiendo las ecuaciones respectivas para cada variable de estado y de control, de tal manera que permita al controlador llevar al robot por dicha trayectoria.
-
Mediante la aplicación de una trayectoria tipo sinusoidal, se propuso un procedimiento para poder definir las referencias de cada variable del sistema de acuerdo con una función general, de tal manera que cualquier tipo de trayectoria, capaz de definirse según una función matemática, pueda integrarse como trayectoria deseada al sistema.
-
Se propuso una aplicación a la industria, de tal manera que este trabajo de investigación pueda brindar una solución viable para la problemática dada en una empresa, y así promover el desarrollo tecnológico aplicable a la sociedad.
-
Se demostró, sobre la base de simulación, que la implementación del sistema autónomo utilizando robot móvil tipo tráiler es posible aplicarlo a nivel industrial en el área de carga/descarga, permitiendo un proceso preciso y automático.
-
Se sugiere realizar el sistema de control que integra un controlador lineal y lógica difusa, aplicado a un tráiler con N cuerpos, incrementando los criterios en cada controlador de acuerdo con la cantidad de cuerpos del tráiler.
Referencias
Cárdenas, A. M. (2004). Intelligent car parking using fuzzy-neural networks. In Proceedings of the 2nd LACCEI International Latin American and Caribbean Conference for Engineering and Technology (pp. 2-4). Florida: LACCEI.
Cheng, J., Zhang, Y. y Wang, Z. (febrero, 2015). Orientation tracking control of mobile robot with three trailers. In 2015 IEEE International Conference on Robotics and Biometrics (ROBIO) (pp. 739-744). Zhuhai: IEEE.
Cheng, J., Zhang, Y. y Wang, Z. (julio, 2015). A direct Lyapunov approach for tracking control of mobile robot with two on-axle hitching trailers. In 2015 27th Chinese Control and Decision Conference (CCDC). (pp. 3429-3432). Singapore: IEEE Industrial Electronics.
Elhassan, A. (2015). Autonomous driving system for reversing an articulated vehicle. Stockholm: KTH Royal Institute of Technology.
Evestedt, N., Ljungqvist, O. y Axehill, D. (agosto, 2016). Path tracking and stabilization for a reversing general 2-trailer configuration using a cascaded control approach. In Intelligent Vehicles Symposium (IV), 2016 IEEE (pp. 1156-1161). Gothenburg: IEEE.
Evestedt, N., Ljungqvist, O. y Axehill, D. (diciembre, 2016). Motion planning for a reversing general 2-trailer configuration using Closed-Loop RRT. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (pp. 3690-3697). Daejeon: IEEE.
Kayacan, E., Kayacan, E., Ramon, H. y Saeys, W. (2015). Learning in centralized nonlinear model predictive control: Application to an autonomous tractor-trailer system. IEEE Transactions on Control Systems Technology, 23(1), 197-205.
Kural, K., Hatzidimitris, P., van de Wouw, N., Besselink, I. y Nijmeijer, H. (2017). Active Trailer Steering Control for High Capacity Vehicle Combinations. IEEE Transactions on Intelligent Vehicles, 2(4), 251-265.
Leng, Z. y Minor, M. A. (2017). Curvature-Based Ground Vehicle Control of Trailer Path Following Considering Sideslip and Limited Steering Actuation. IEEE Transactions on Intelligent Transportation Systems, 18(2), 332-348.
Li, B., Wang, K. y Shao, Z. (diciembre, 2015). Time-optimal trajectory planning for tractor-trailer vehicles via simultaneous dynamic optimization. In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3844-3849). Hamburg: IEEE.
Liao, Y., Ou, Y. y Meng, S. (julio, 2017). Wheeled mobile robot based on Adaptive Linear Quadratic Gaussian control. In 2017 29th Chinese Control And Decision Conference (CCDC) (pp. 5768-5775). Chongqing: IEEE.
Lin, F., Lin, Z. y Qiu, X. (agosto, 2016). LQR controller for car-like robot. In 2016 35th Chinese Control Conference (CCC) (pp. 2515-2518). Chengdu: IEEE.
Michałek, M. M. (2017). Cascade-Like Modular Tracking Controller for non-Standard N-Trailers. IEEE Transactions on Control Systems Technology, 25(2), 619-627.
Moran, A. y Hayase, H. (agosto, 1995). Shortest-trajectory control of autonomous mobile robots using nonlinear observers. In SICE’95. Proceedings of the 34th SICE Annual Conference. International Session Papers (pp. 1415-1418). Hokkaido: IEEE.
Prasad, A., Sharma, B. y Vanualailai, J. (junio, 2016). A Geometric Approach to Motion Control of a Standard Tractor-Trailer Robot. In 2016 3rd Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE) (pp. 53-59). Nadi: IEEE.
Rigatos, G., Siano, P., Wira, P., Busawon, K. y Binns, R. (agosto, 2017). Nonlinear optimal control for autonomous navigation of a truck and trailer system. In 2017 18th International Conference on Advanced Robotics (ICAR) (pp. 505-510). Hong Kong: IEEE.
Ritzen, P., Roebroek, E., van de Wouw, N., Jiang, Z. P. y Nijmeijer, H. (2016). Trailer Steering Control of a Tractor–Trailer Robot. IEEE Transactions on Control Systems Technology, 24(4), 1240-1252.
Tan, P. y Cai, Z. (diciembre, 2015). Modelling and Planning of Mobile Robot Navigation Control in Unknown Environment. In 2015 International Conference on Computational Intelligence and Communication Networks (CICN) (pp. 1532-1536). Jabalpur: IEEE.
Van Hau, P., Nam, D. P., Ha, N. T., Thanh, P. T., Hai, H. T. y Hanh, H. D. (julio, 2017). Asymptotic stability of the whole tractor-trailer control system. In System Science and Engineering (ICSSE), 2017 International Conference on (pp. 423-427). IEEE.
VR, D. A. S. T. (2017). Non-model-based control of a wheeled vehicle pulling two trailers to provide early powered mobility and driving experiences. IEEE Transactions on Neural Systems and Rehabilitation Engineering.
Wu, T. y Hung, J. Y. (junio, 2017). Lateral position control for a tractor-trailer system using steering rate input. In 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE) (pp. 503-507). Edinburgh: IEEE.
Wu, T. y Hung, J. Y. (marzo, 2017). Lateral position control for a tractor-trailer system using coordinate transformation and hybrid controllers. In 2017 SoutheastCon (pp. 1-6). North Carolina: IEEE.
Wu, T. y Hung, J. Y. (marzo, 2017). Path following for a tractor-trailer system using model predictive control. In SoutheastCon, 2017 (pp. 1-5). North Carolina: IEEE.
Yuan, J., Sun, F. y Huang, Y. (2015). Trajectory generation and tracking control for double-steering tractor–trailer mobile robots with on-axle hitching. IEEE Transactions on Industrial Electronics, 62(12), 7665-7677.
Yue, M., Hou, X. y Yang, L. (julio, 2017). An efficient trajectory tracking control for tractor-trailer vehicle system. In 2017 36th Chinese Control Conference (CCC) (pp. 546-551). Dalian: IEEE.
Zheltoukhov, A. A. y Stankevich, L. A. (febrero, 2017). A survey of control architectures for autonomous mobile robots. In 2017 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus) (pp. 1094-1099). St. Petersburg: IEEE.