Artículos
Área óptima para zapatas combinadas rectangulares asumiendo que la superficie de contacto con el suelo trabaja parcialmente a compresión
Optimal area for rectangular combined footings assuming that the contact surface with the soil works partially to compression
 Pablo Montes-Paramo pmontesp@hotmail.com
Arnulfo Luevanos-Rojas arnulfol_2007@hotmail.com
Sandra López-Chavarría sandylopez5@hotmail.com
Manuel Medina-Elizondo drmanuelmedina@yahoo.com.mx
Ricardo Sandoval-Rivas ricardo_sandoval_rivas@hotmail.com
Pablo Montes-Paramo pmontesp@hotmail.com
Arnulfo Luevanos-Rojas arnulfol_2007@hotmail.com
Sandra López-Chavarría sandylopez5@hotmail.com
Manuel Medina-Elizondo drmanuelmedina@yahoo.com.mx
Ricardo Sandoval-Rivas ricardo_sandoval_rivas@hotmail.com
Área óptima para zapatas combinadas rectangulares asumiendo que la superficie de contacto con el suelo trabaja parcialmente a compresión
Ingeniería, investigación y tecnología, vol. XXIV, núm. 2, pp. 01-15, 2023
Universidad Nacional Autónoma de México, Facultad de Ingeniería
Recepción: 29 Octubre 2021
Aprobación: 25 Diciembre 2022
Resumen: Este documento presenta un modelo matemático para obtener el área mínima de la superficie de contacto con el suelo (el suelo se considera elástico) para zapatas combinadas rectangulares rígidas asumiendo que la superficie de contacto trabaja parcialmente a compresión, es decir, una parte del área de contacto de la zapata está sujeta a compresión y en la otra parte de la zapata no hay presión (presión cero). Algunos documentos presentan el costo mínimo (el costo mínimo depende del área de contacto de la zapata con el suelo) para diseño de zapatas combinadas rectangulares (Velázquez et al., 2018), pero se considera el área de la zapata con el suelo trabajando completamente en compresión, y otros documentos muestran las ecuaciones para las dimensiones de la zapata combinada rectangular trabajando parcialmente a compresión, pero el momento sobre el eje transversal no se considera (Luévanos, 2016). La metodología se desarrolla para los cinco casos posibles de zapatas sometidas a flexión biaxial y cuatro casos posibles de zapatas sometidas a flexión uniaxial (dos en dirección transversal y dos en dirección longitudinal de la zapata), tomando en cuenta las propiedades geométricas que se generan del diagrama de presiones producidas por el suelo sobre la zapata. Ejemplos numéricos se muestran para encontrar el área mínima de zapatas combinadas rectangulares bajo flexión biaxial y uniaxial. El modelo propuesto presenta una reducción significativa en el área mínima de contacto en el suelo, respecto al modelo propuesto por otros autores, si la fuerza resultante se encuentra fuera del núcleo central.
Descriptores: Área mínima, zapatas rectangulares combinadas, flexión biaxial, flexión uniaxial, area trabaja parcialmente bajo compresión.
Abstract: This paper presents a mathematical model to obtain the minimum area of the contact surface with soil (the soil is considered elastic) for rigid rectangular combined footings assuming that the contact surface works partially to compression, i.e., a part of the contact area of the footing is subject to compression and the other there is not pressure (pressure zero). Some papers present the minimum cost (the minimum cost depends on the contact area of the footing with the soil) for design of rectangular combined footings (Velázquez et al., 2018), but the footing area with the soil working completely in compression is considered, and other papers show the equations for the dimensions of the rectangular combined footing partially working to compression, but the moment on the transverse axis is not considered (Luévanos, 2016). The methodology is developed for the five possible cases of footings subjected to biaxial bending, and four possible cases of footings subjected to uniaxial bending (two in the transverse direction and two in the longitudinal direction of the footing), taking into account the geometric properties generated from the diagram of pressures produced by the soil on the footing. Numerical examples are shown to find the minimum area of rectangular combined footings under biaxial and uniaxial bending. The proposed model presents a significant reduction in the minimum contact area on the soil with respect to the model proposed by other authors, if the resultant force is located outside the central nucleus.
Keywords: Minimum area, rectangular combined footings, biaxial bending, uniaxial bending, area works partially under compression.
Introducción
Las zapatas o cimientos de concreto reforzado (subestructura) son elementos estructurales para soportar las cargas de las columnas y los muros para transmitir y distribuir sus cargas al suelo.
El miembro estructural más importante de una estructura es la base o subestructura, porque la falla de dicha subestructura es muy costosa y muy difícil de reparar. Por otro lado, la falla de la superestructura es posible repararla o modificarla para salvar esos elementos estructurales.
La Figura 1 muestra la distribución de esfuerzos de contacto bajo la base de la cimentación sometida a una carga concentrada ubicada en el centro de gravedad de la cimentación bajo suelos arcillosos y arenosos para cimentaciones rígidas. Las Figuras 1a y 1b se presentan para cimentaciones rígidas que muestran asentamientos uniformes y esfuerzos variables en contacto con el suelo. Además, dado que las zapatas extendidas reales se acercan a la rigidez perfecta, la distribución de los esfuerzos de contacto no es uniforme. No obstante, por simplicidad, se supone que la distribución de esfuerzos de contacto es uniforme para facilitar el cálculo de la capacidad portante y el asentamiento, como se muestra en la Figura 1c. La diferencia del momento máximo entre la Figura 1b y la Figura 1c es Mmax Figura 1b = 1.27 Mmax Figura 1c (Zeevaert, 1973). El error debido a esta suposición no es significativo (Coduto, 2001).
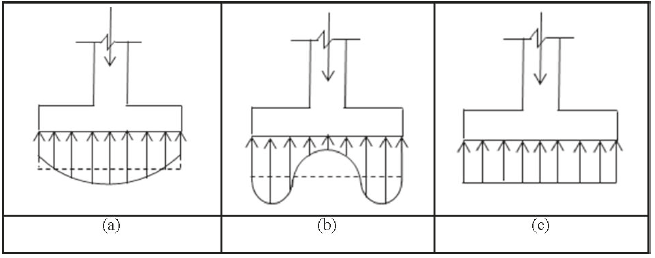
Figura 1
Distribución de la presión a lo largo de la base de zapatas poco profundas sometidas a cargas concentradas: a) Zapatas rígidas sobre suelos arenosos, b) Zapatas rígidas sobre suelos arcillosos, c) Distribución simplificada (Coduto, 2001)
El objetivo principal de un ingeniero estructural es obtener el dimensionamiento óptimo de la zapata para soportar las cargas que descienden de la superestructura.
Las investigaciones más importantes presentadas en el pasado respecto a las zapatas aisladas rectangulares para el manejo eficiente de los problemas de interacción suelo-zapata se han llevado a cabo mediante el uso de métodos analíticos (Peck et al., 1974; Jiang & Jiang, 1983; Vitone & Valsangkar, 1986; Irles-Más & Irles-Más, 1992; Algin, 2000, 2001, 2007; Özmen, 2011; Bezmalinovic, 2016; Aydogdu, 2016; Girgin, 2017; Rawat et al., 2020), por graficas o ayudas de diseño (Teng, 1979; Highter & Anders, 1985; Young & Budynas, 2002; Galvis & Smith, 2020), y por métodos analíticos y graficas o ayudas de diseño (Rodriguez & Aristizabal, 2004, 2013a y b). Estos documentos se desarrollan para obtener la capacidad de carga axial y momento biaxial de la zapata, o la distribución de presión en el área de contacto de una zapata aislada rectangular rígida descansando sobre el suelo, y si se desean obtener las dimensiones de la zapata debe ser a través de un procedimiento iterativo.
Las aportaciones más importantes sobre los estudios de zapatas combinadas rectangulares son de Konapure & Vivek (2013) y Vivek et al. (2014), quienes presentaron un estudio comparativo sobre el análisis elástico convencional simplificado por el Método de Elementos Finitos y el Modelo de Winkler para zapatas combinadas rectangulares, utilizando el software MATLAB para resolver el problema que incluye las reacciones en los apoyos, los esfuerzos de flexión y cortante y los desplazamientos. Luévanos (2014) presentó el diseño de zapatas combinadas rectangulares delimitadas por una línea de propiedad asumiendo que la presión del suelo es lineal, la presión se presenta en función de una carga axial P, momento en el eje transversal Mx y momento en el eje longitudinal My en cada columna. Luévanos (2016) propuso un modelo analítico para obtener las dimensiones de las zapatas rectangulares combinadas teniendo en cuenta que la fuerza resultante está ubicada sobre el eje transversal, es decir, la fuerza resultante está ubicada en el centro de gravedad de la zapata en la dirección longitudinal. Luevanos et al. (2017) presentaron un estudio comparativo para el diseño de zapatas combinadas trapezoidales y rectangulares de concreto reforzado y delimitadas por una línea de propiedad. Ravi et al. (2018) estudiaron la presión de contacto bajo la zapata combinada rectangular que descansa sobre el suelo considerando parámetros variables como las relaciones de largo a ancho, la relación de Poisson y la rigidez relativa de la zapata. Velázquez et al. (2018) desarrollaron un diseño óptimo basado en un criterio de costo mínimo para zapatas combinadas rectangulares de concreto reforzado para obtener las dimensiones (lados y profundidad efectiva) y las áreas de acero de refuerzo transversal (superior e inferior) y longitudinal (superior e inferior) del zapatas.
De acuerdo con la revisión de la literatura, los aportes relacionados con el tema presentado en este trabajo son de Luévanos (2016), quien propuso un modelo analítico para obtener las dimensiones de las zapatas combinadas rectangulares, tomando en cuenta que el área de contacto con el suelo trabaja parcialmente a compresión y asumiendo que la fuerza resultante se encuentra en el eje transversal, es decir, la fuerza resultante se ubica en el centro de gravedad de la zapata en dirección longitudinal. Este trabajo está limitado ya que no considera el momento sobre el eje transversal y no presenta el área mínima. Velázquez et al. (2018) presentaron el costo mínimo para zapatas combinadas rectangulares, pero se considera que el área de la zapata con el suelo está trabajando completamente en compresión. Por lo tanto, no existen trabajos con el nivel de conocimiento actual sobre el área mínima de zapatas combinadas rectangulares considerando que el área trabaja parcialmente a la compresión.
Formulacion de los modelos
La ecuación general para flexión biaxial para cualquier tipo de cimentación es:
Donde:
σ = esfuerzo o presión generada por el suelo en cualquier punto sobre la zapata
P = carga axial aplicada sobre la zapata
A = área o superficie de contacto de la zapata con el suelo
Mx = momento sobre el eje X
My = momento sobre el eje Y
Ix = momento de inercia sobre el eje X
Iy = momento de inercia sobre el eje Y
La Figura 2 muestra una zapata combinada rectangular sometida a carga axial y dos momentos flexionantes ortogonales en cada columna.
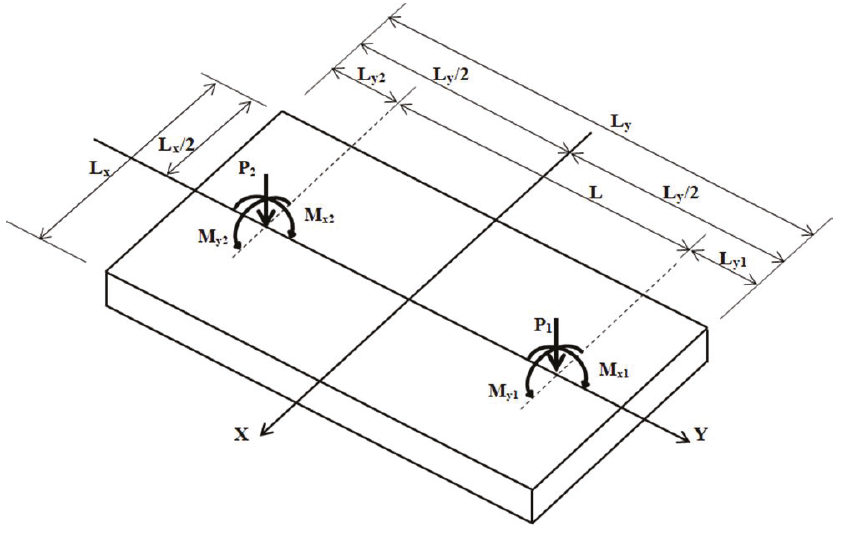
Figura 2
Zapata combinada rectangular sometida a flexión biaxial
La zapata combinada rectangular rígida se deforma en forma plana, es decir, el diagrama de distribución de la presión del suelo se considera lineal bajo la zapata.
Donde:
R (fuerza resultante total) = P1 + P2, MxT (momento resultante total aplicado en el eje X) = Mx1 + Mx2 + P1 (Ly/2 - Ly1) - P2 (Ly/2 - Ly2), MyT (momento resultante total aplicado en el eje Y) = My1 + My2.
La ecuación de flexión biaxial no es válida, cuando la fuerza resultante R está fuera del núcleo central, una zona delimitada y bien conocida, lo que indica un área sin comprimir.
La Figura 3 muestra el diagrama de excentricidad resultante completo de toda la base para una zapata combinada rectangular, este diagrama se generó a partir de las zapatas aisladas rectangulares (Irles & Irles, 1992; Özmen, 2011).
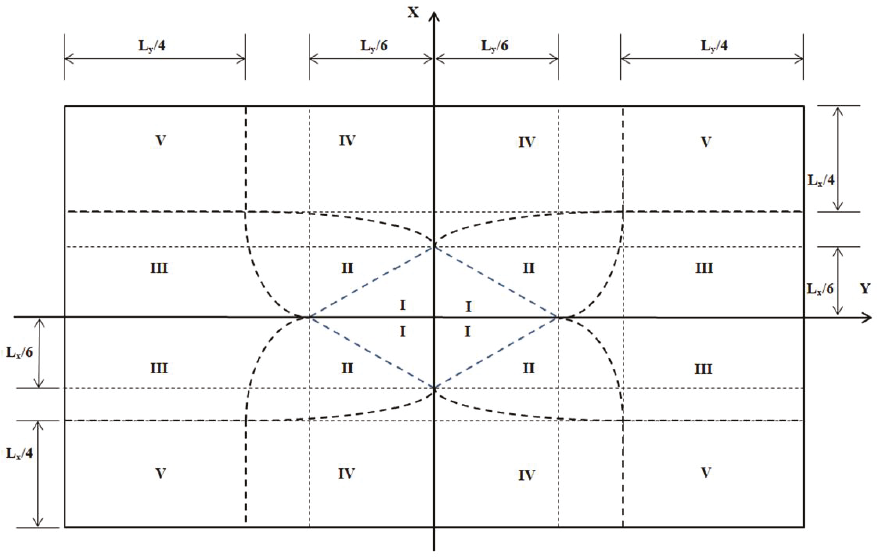
Figura 3
Diagrama de excentricidad resultante completo de una zapata combinada rectangular rígida de acuerdo con la ubicación de la fuerza resultante
Zapata combinada rectangular sometida a flexión biaxial
La Figura 4 muestra los cinco casos posibles para una zapata combinada rectangular sometida a carga axial y dos momentos flexionantes ortogonales en cada columna.
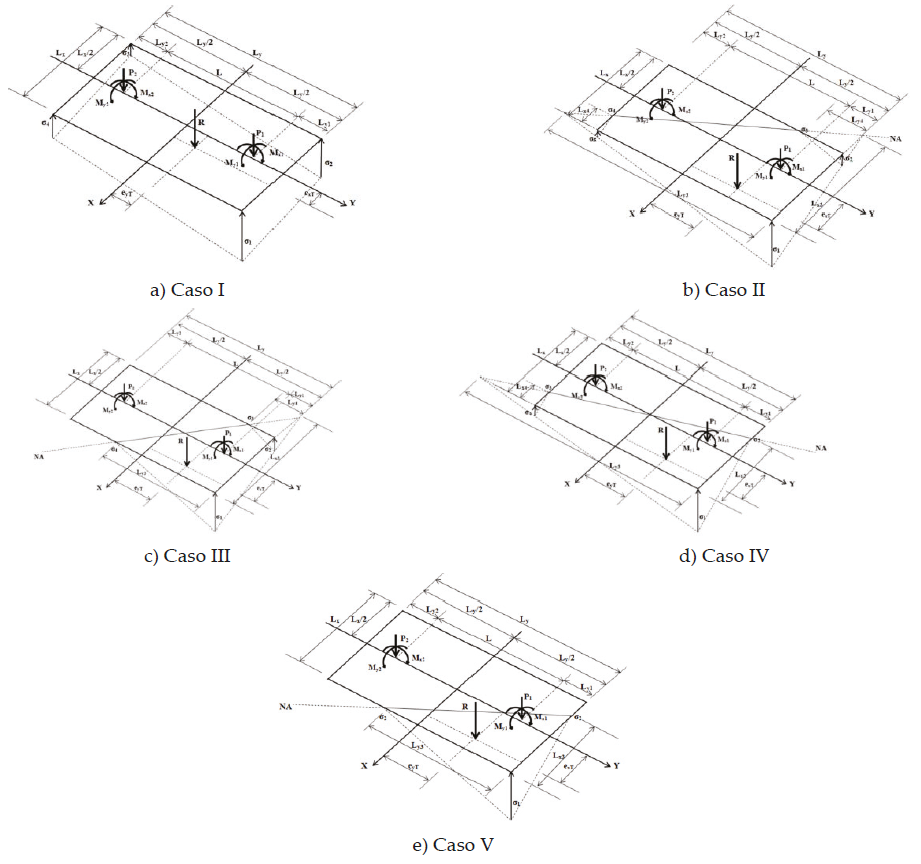
Figura 4
Zapata combinada rectangular sometida a flexión biaxial
Para el caso 1, se asume que toda la superficie inferior de la zapata trabaja bajo compresión. Las presiones generadas por el suelo sobre la zapata se obtienen mediante la ecuación de la flexión biaxial.
Para los casos II, III, IV y V, se asume que toda la superficie inferior de la zapata trabaja parcialmente bajo compresión, es decir, parte de la superficie de contacto no tiene presión, y por las propiedades geométricas de una pirámide de base triangular se obtienen la fuerza resultante R, el momento en el eje X MxT y el momento en el eje Y MyT.
Las presiones generadas por el suelo sobre la zapata se obtienen mediante la ecuación general del plano de presiones por la ecuación (1), a partir de tres puntos conocidos.
La ecuación general de un plano de presiones en 3-D es:
Donde: A, B, C y D son constantes.
Para los casos II, III, IV y V, los tres puntos conocidos del plano de presiones son:
La ecuación general del plano de presiones se obtiene de la siguiente manera:
El valor de la presión en cualquier punto σz se obtiene resolviendo el determinante:
Caso I
La Figura 4a muestra cuando R se ubica dentro del núcleo central. Las de relaciones de excentricidades son:
Las ecuaciones generales de la presión del suelo en cada esquina de las zapatas sometidas a carga axial y dos momentos en los ejes X e Y de cada columna se obtienen de la siguiente manera:
Donde:
σmax = presión máxima del suelo sobre la zapata
σmin = presión mínima del suelo sobre la zapata
A = área o superficie de contacto de la zapata con el suelo
Ix = momento de inercia en el eje X
Iy es el momento de inercia en el eje Y
Caso II
La Figura 4b muestra cuando R se ubica fuera del núcleo central y la condición de relaciones de excentricidades es la siguiente:
Las ecuaciones generales para R, MxT y MyT son:
Caso III
La Figura 4c muestra cuando R se ubica fuera del núcleo central y la condición de relaciones de excentricidades es la siguiente:
Las ecuaciones generales para R, MxT y MyT son:
Caso IV
La Figura 4d muestra cuando R se ubica fuera del núcleo central y la condición de relaciones de excentricidades es la siguiente:
Las ecuaciones generales para R, MxT y MyT son:
Caso V
La Figura 4e muestra cuando R se ubica fuera del núcleo central y la condición de relaciones de excentricidades es la siguiente:
Las ecuaciones generales para R, MxT y MyT son:
Zapata combinada rectangular sometida a flexión uniaxial
La Figura 5 muestra los cuatro casos posibles para una zapata combinada rectangular sometida a carga axial y un momento flexionante en cada columna.
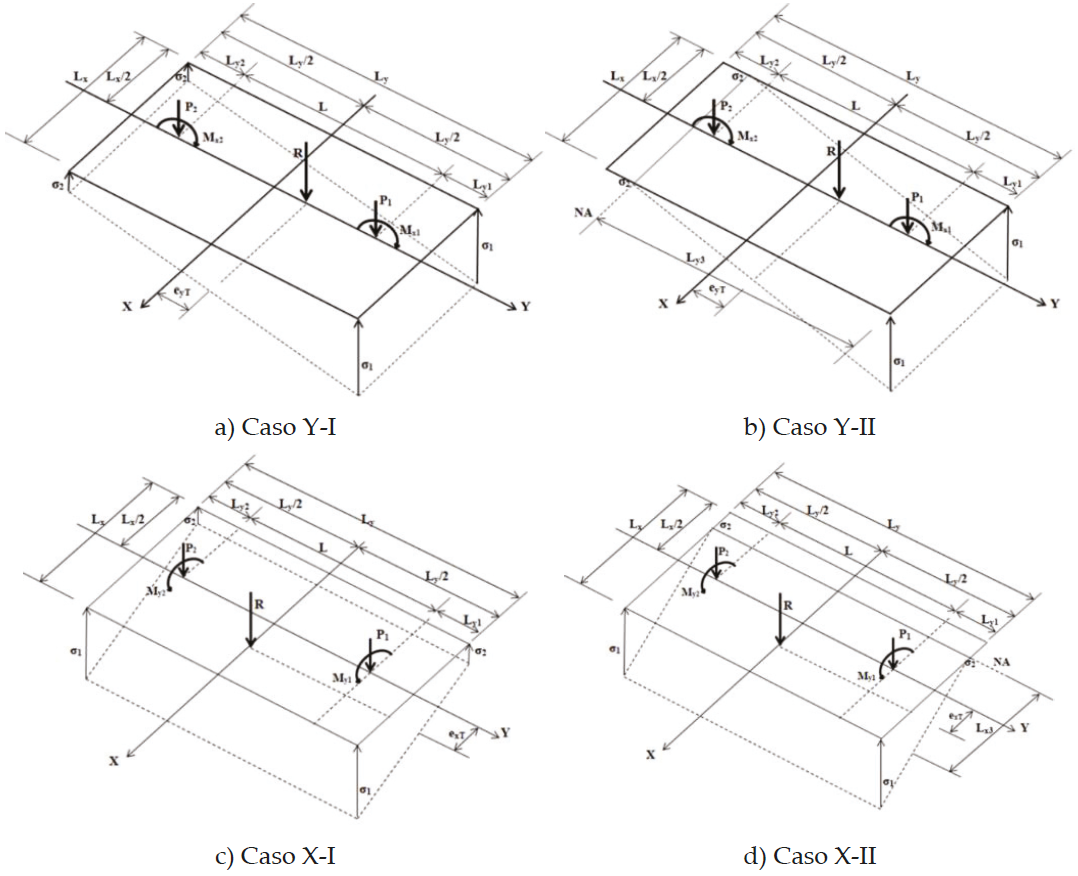
Figura 5
Zapata combinada rectangular sometida a flexión uniaxial
Para los casos Y-I y X-1, se asume que toda la superficie de contacto de la zapata trabaja bajo compresión. Las presiones generadas por el suelo sobre la zapata se obtienen mediante la ecuación de la flexión uniaxial por la ecuación (1), según sea el caso (MxT = 0 o MyT = 0).
Para los casos Y-II y X-II, se asume que toda la superficie de contacto de la zapata trabaja parcialmente bajo compresión, y por las propiedades geométricas de una prisma triangular se obtienen la fuerza resultante R, el momento en el eje X MxT y el momento en el eje Y MyT.
Caso Y-I
La Figura 5a muestra cuando R se ubica dentro del núcleo central y sobre el eje Y.
Las relaciones de excentricidades son:
La ecuación (7) y (8) de flexión biaxial es aplicable a este caso, ya que My = 0.
Caso Y-II
La Figura 5b muestra cuando R se ubica fuera del núcleo central, sobre el eje Y, y la condición de relaciones de excentricidades es la siguiente:
Ahora, para este caso los tres puntos conocidos del plano de presiones son:
La ecuación general del plano de presiones se obtiene de la siguiente manera:
El valor de σz se obtiene resolviendo el determinante:
Las ecuaciones generales para R y MxT son:
Caso X-I
La Figura 5c muestra cuando R se ubica dentro del núcleo central y sobre el eje X.
Las relaciones de excentricidades son:
Las ecuaciones generales de la presión del suelo en cada esquina de las zapatas sometidas a carga axial y momentos en el eje Y de cada columna se obtienen de la siguiente manera:
Caso X-II
La Figura 5d muestra cuando R se ubica fuera del núcleo central, sobre el eje X y la condición de relaciones de excentricidades es la siguiente:
Ahora, para este caso los tres puntos conocidos del plano de presiones son:
La ecuación general del plano de presiones se obtiene de la siguiente manera:
El valor de σz se obtiene resolviendo el determinante:
Las ecuaciones generales para R y MyT son:
Superficie óptima para zapatas combinadas rectangulares
La función objetivo (área mínima Amin) para cada caso es:
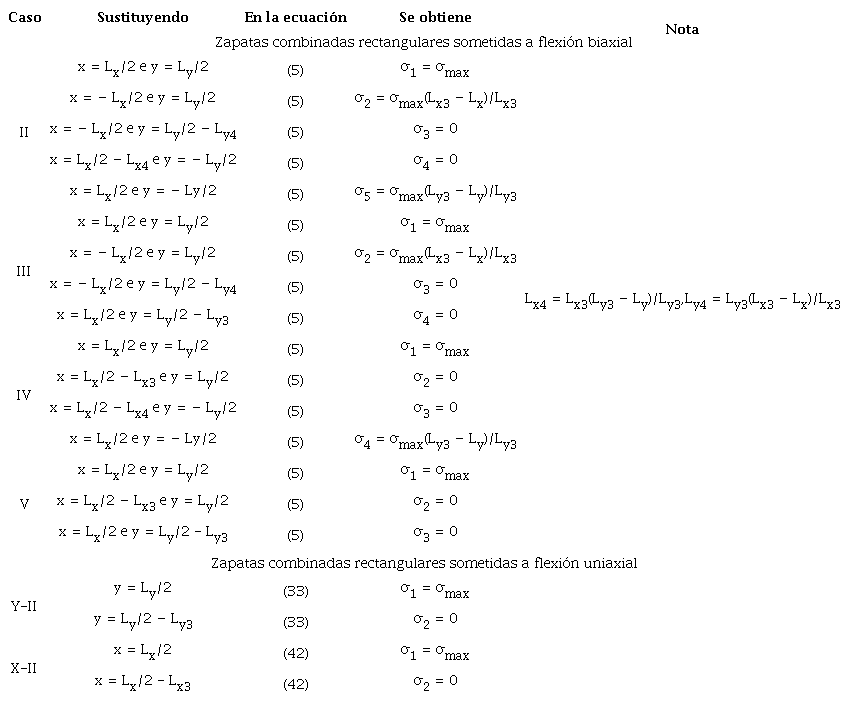
Las funciones de restricción para flexión biaxial en cada caso se presentan en la Tabla 1.
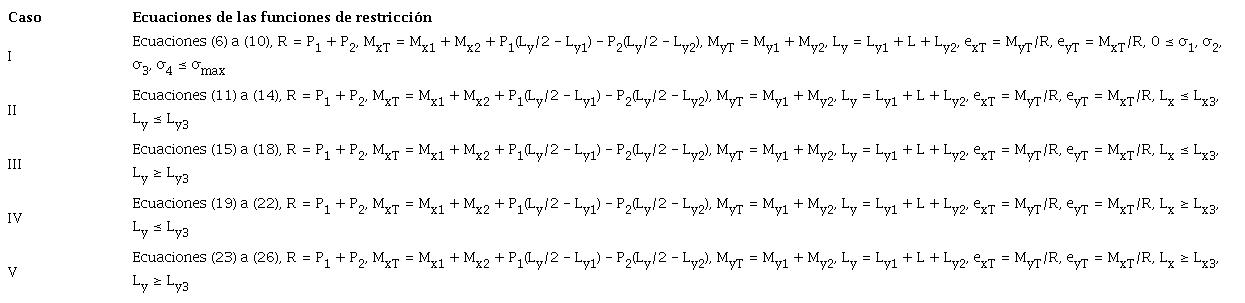
También, las funciones de restricción por las limitaciones en la dirección del eje Y son:
No limitado: Ly1 ≥ c1y/2 y Ly2 ≥ c2y/2.
Limitado en la columna 1: Ly1 = c1y/2 y Ly2 ≥ c2y/2.
Limitado en la columna 2: Ly1 ≥ c1y/2 y Ly2 = c2y/2.
Limitado en las dos columnas: Ly1 = c1y/2 y Ly2 = c2y/2.
Las funciones de restricción para flexión uniaxial en cada caso se presentan en la Tabla 2.
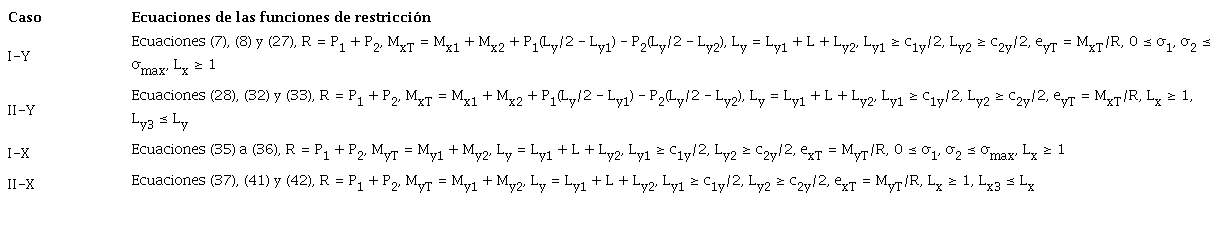
Donde: Lx y Ly deben ser mayor que 1 para que no haya zapatas excesivamente desproporcionadas, c1y y c2y son los lados de las columnas en la dirección Y.
Aplicación numérica de los modelos
Dos ejemplos numéricos se presentan para obtener el área mínima para zapatas combinadas rectangulares sometidas a flexión biaxial para los cinco casos y cada ejemplo se presenta para los cuatro tipos de restricciones en la dirección del eje Y (no limitado, limitado en la columna 1, limitado en la columna 2, limitado en las columnas 1 y 2). Para los dos los ejemplos, las columnas son de 40x40 cm, y la zapata está sujeta a P1 = 500 kN (ejemplo 1), P1 = 1000 kN (ejemplo 2), Mx1 = 1000 kN-m, My1 = 250 kN-m, P2 = 1000 kN, Mx2 = 2000 kN-m, My2 = 500 kN-m, L = 3.00, 4.00, 5.00, 6.00, 7.00 m, σmax = 200 kN/m2.
Cuatro ejemplos numéricos se presentan para obtener el área mínima para zapatas combinadas rectangulares sometidas a flexión uniaxial. Dos ejemplos cuando R se encuentra en el eje Y. Para los dos ejemplos las columnas son de 40x40 cm, y la zapata está sujeta a P1 = 250 kN (ejemplo 1), P1 = 500 kN (ejemplo 2), Mx1 = 1000 kN-m, P2 = 500 kN, Mx2 = 2000 kN-m, L = 3.00, 4.00, 5.00, 6.00, 7.00 m, σmax = 200 kN/m2. Dos ejemplos cuando R se encuentra en el eje X. Para los dos los ejemplos las columnas son de 40x40 cm y la zapata está sujeta a P1 = 250 kN (ejemplo 1), P1 = 500 kN (ejemplo 2), My1 = 1000 kN-m, P2 = 500 kN, My2 = 2000 kN-m, L = 3.00, 4.00, 5.00, 6.00, 7.00 m, σmax = 200 kN/m2.
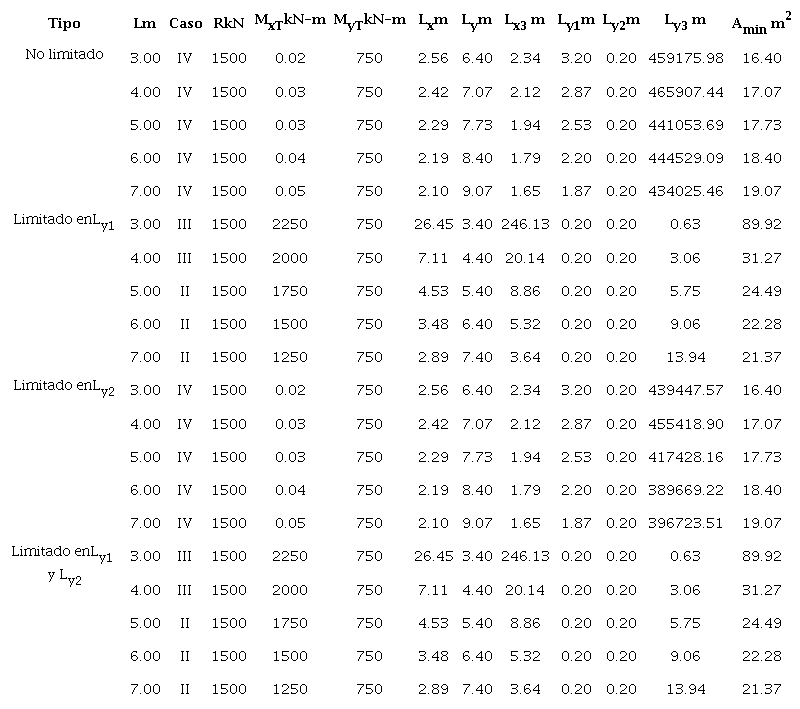
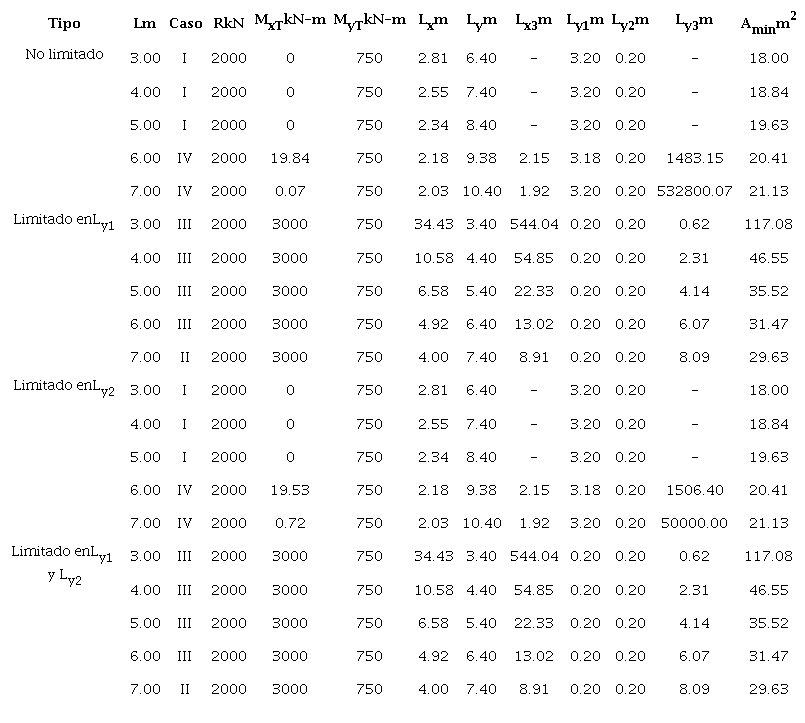
La Figura 6 muestra el área más pequeña de los cinco casos para los cuatro tipos de restricciones en los ejemplos 1 y 2 (zapatas combinadas rectangulares bajo flexión biaxial). Las Tablas 3 y 4 (Anexo) muestran en detalle los ejemplos 1 y 2 de las zapatas combinadas rectangulares bajo flexión biaxial para los cuatro tipos de restricciones. La Tabla 3 para el ejemplo 1 y la Tabla 4 para el ejemplo 2 (ver anexo).
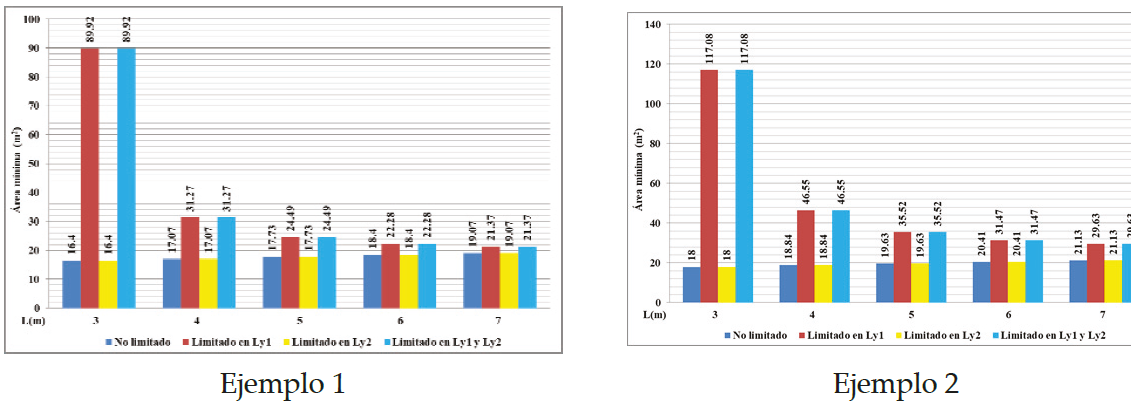
Figura 6
Zapatas combinadas rectangulares sometidas a flexión biaxial
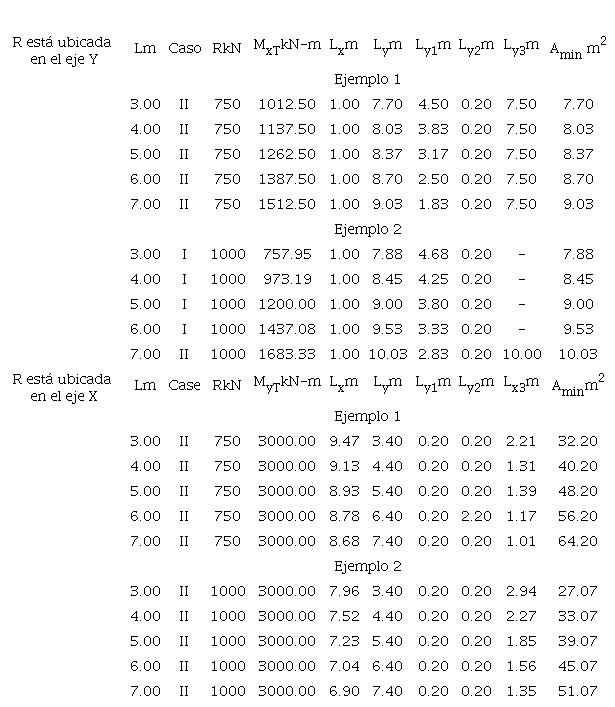
La Figura 7 muestra el área más pequeña de los dos casos para el ejemplo 1 y 2 cuando R se ubica en el eje Y, y los dos casos para el ejemplo 1 y 2 cuando R se ubica en el eje X (zapatas combinadas rectangulares bajo flexión uniaxial). La Tabla 5 muestra en detalle para los ejemplos 1 y 2 de las zapatas combinadas rectangulares bajo flexión uniaxial para los dos casos (R está ubicada en el eje X y R está ubicada en el eje Y) (ver anexo).
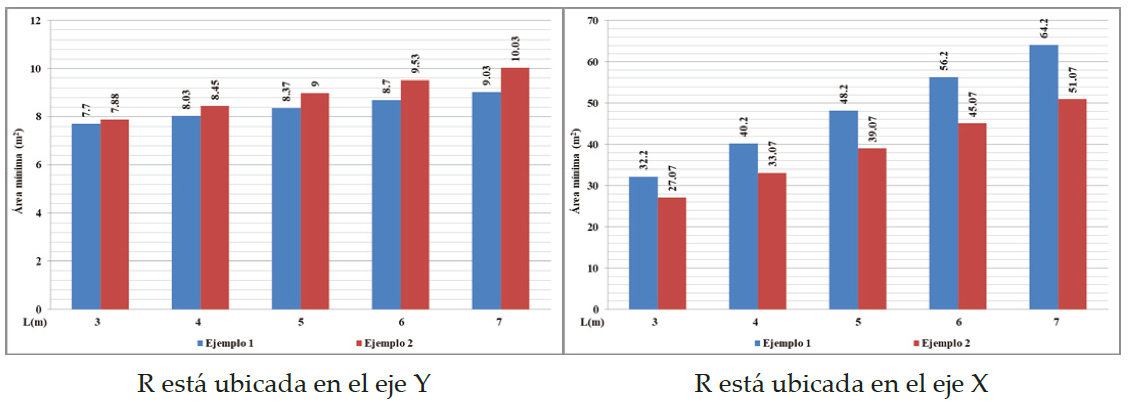
Figura 7
Zapatas combinadas rectangulares sometidas a flexión uniaxial
Resultados
Una forma de verificar las ecuaciones de las zapatas combinadas rectangulares sometidas a flexión biaxial para los casos II, III, IV y V y para flexión uniaxial para los casos Y-II y X-II es como como se muestra en la Tabla 6.
La Figura 6 muestra el área mínima de las zapatas combinadas rectangulares sometidas a flexión biaxial para los dos ejemplos.
La Figura 6a del ejemplo 1 presenta lo siguiente: Los tipos 1 (no limitado) y 3 (limitado en la columna 2) muestran los mismos resultados, y los tipos 2 (limitado en la columna 1) y 4 (limitado en las columnas 1 y 2) presentan los mismos resultados. Para los tipos 1 y 3, a medida que aumenta el espaciado entre las columnas, aumentan las áreas de las zapatas. Para los tipos 2 y 4, a medida que aumenta el espaciado entre las columnas, las áreas de las zapatas disminuyen.
La Figura 6b del ejemplo 2 presenta lo siguiente: Este ejemplo muestra el mismo comportamiento que el ejemplo 1, pero con valores diferentes.
La Figura 7 muestra el área mínima de las zapatas combinadas rectangulares sometidas a flexión uniaxial para los dos ejemplos cuando R está ubicada en el eje Y, y los dos ejemplos cuando R está ubicada en el eje X.
La Figura 7a de los ejemplos 1 y 2 cuando R se ubica en el eje Y presenta lo siguiente: Los dos ejemplos tienen el mismo comportamiento, a medida que aumenta la separación de las columnas, aumentan las áreas de zapatas. El ejemplo 2 es mayor que el ejemplo 1 para todas las separaciones entre las dos columnas.
La Figura 7b de los ejemplos 1 y 2 cuando R se ubica en el eje X presenta lo siguiente: Los dos ejemplos tienen el mismo comportamiento, a medida que aumenta la separación de las columnas, aumentan las áreas de zapatas. El ejemplo 1 es mayor que el ejemplo 2 para todas las separaciones entre las dos columnas.
La Tabla 3 del ejemplo 1 para zapatas combinadas rectangulares sometidas a flexión biaxial muestra lo siguiente: Para los tipos 1 y 3 se presenta el caso IV para todas las separaciones entre las dos columnas, cuando la separación de las columnas aumenta, Lx, Lx3 y Ly1 disminuyen, Amin, Ly y MxT aumentan, Ly2 es igual. Para los tipos 2 y 4 se presenta el caso III para las separaciones L = 3.00 y 4.00 m, y el caso II para las separaciones L = 5.00, 6.00 y 7.00 m, cuando la separación de columnas aumenta, Amin, Lx, Lx3 y MxT disminuyen, Ly y Ly3 aumentan, Ly1 y Ly2 son iguales.
La Tabla 4 del ejemplo 2 para zapatas rectangulares combinadas sometidas a flexión biaxial muestra lo siguiente: Para los tipos 1 y 3 se presenta el caso I para las separaciones L = 3,00, 4,00 y 5,00 m, y el caso IV para las separaciones L = 6.00 y 7.00 m, cuando aumenta la separación de las columnas, Lx, Lx3 (no aparece para el caso I), Ly1 y MxT (para el caso I es cero) disminuyen, Amin, Ly, Ly3 (no aparece para el caso I) aumentan, Ly2 es igual. Para los tipos 2 y 4 se presenta el caso III para las separaciones L = 3.00, 4.00, 5.00 y 6.00 m, y el caso II para las separaciones L = 7.00 m, cuando el espaciamiento de columnas aumenta, Amin, Lx y Lx3 disminuyen, Ly y Ly3 aumenta, Ly1, Ly2 y MxT son iguales.
La Tabla 5 de los ejemplos 1 y 2 para zapatas combinadas rectangulares sometidas a flexión uniaxial muestra lo siguiente: Para R ubicado en el eje Y del ejemplo 1 se presenta en el caso II para todas las separaciones entre las dos columnas, cuando la separación de las columnas aumenta, Ly1 disminuye, Amin, Ly y MxT aumentan, Lx, Ly2 y Ly3 son iguales. Para R ubicado en el eje Y del ejemplo 2 se presenta el caso I para las separaciones L = 3.00, 4.00, 5.00 y 6.00 m, y el caso II para las separaciones L = 7.00 m, cuando el espaciamiento de las columnas aumenta, Ly1 disminuye, Amin, Ly y MxT aumentan, Lx y Ly2 son iguales, Ly3 solo aparece para L = 7,00 m. Para R ubicado en el eje X del ejemplo 1 se presenta en el caso II para todas las separaciones entre las dos columnas, cuando la separación de las columnas aumenta, Lx y Lx3 disminuyen, Amin y Ly aumentan, Ly1, Ly2 y MyT son iguales. Para R ubicada en el eje X del ejemplo 2 presenta el mismo comportamiento que el ejemplo 1, pero con valores diferentes.
Conclusiones
En este trabajo se presenta un modelo analítico para determinar el área mínima de contacto con el suelo de las zapatas combinadas rectangulares rígidas sometidas a flexión biaxial y uniaxial apoyadas sobre suelos elásticos (la distribución de la presión del suelo es lineal).
El modelo propuesto se formula a partir de un enfoque analítico basado en el área mínima de contacto con el suelo. Para la flexión biaxial, los parámetros constantes o conocidos (variables independientes) son: σmax, P1, Mx1, My1, P2, Mx2, My2, c1y y c2y, y las variables de decisión o desconocidas (variables dependientes) son: Amin, R, MxT, MyT, Lx, Ly, Lx1, Ly1, Ly2, Lx3 y Ly3. Para la flexión uniaxial con R ubicada en el eje Y, los parámetros constantes o conocidos (variables independientes) son: σmax, P1, Mx1, P2, Mx2, c1y y c2y, y las variables de decisión o desconocidas (variables dependientes) son: Amin, R, MxT, Lx, Ly, Lx1, Ly1 y Ly3. Para la flexión uniaxial con R ubicada en el eje X, los parámetros constantes o conocidos (variables independientes) son: σmax, P1, My1, P2, My2, c1y y c2y, y las variables de decisión o desconocidas (variables dependientes) son: Amin, R, MyT, Lx, Ly, Lx1, Ly1 y Lx3.
Las principales conclusiones que se muestran en este trabajo son:
- 1. Algunos autores proponen ecuaciones para obtener los lados de la zapata y el área mínima, pero solo consideran el caso I (toda el área de la zapata trabaja bajo compresión).
- 2. El área mínima de los dos ejemplos considerados para flexión biaxial, los casos I, II, III y IV están siempre presentes, pero se puede presentar el caso V, si los momentos aumentan.
- 3. El modelo propuesto muestra las ecuaciones precisas y simplificadas y también presenta el área mínima para cada caso.
- 4. El modelo propuesto presenta una reducción significativa en el área mínima de contacto en el suelo respecto al modelo propuesto por otros autores, si la fuerza resultante se ubica fuera del núcleo central (exT/Lx + eyT/Ly > 1/6), ya que consideran el area mínima trabajando completamente a compresión.
- 5. La principal ventaja del modelo propuesto sobre cualquier otro modelo es que este considera que el área de contacto con el suelo trabaja parcialmente bajo compresión, es decir, una parte de la superficie inferior de la zapata está sujeta a compresión y en la otra parte, la presión es cero (sin compresión y sin tensión).
- 6. El modelo propuesto se puede utilizar como una revisión de la presión máxima del suelo sobre la zapata, tomando en cuenta la función objetivo para maximizar σmax, y las mismas funciones de restricción para flexión biaxial o flexión uniaxial.
Este estudio presenta una solución robusta y eficaz que se aplica solo para obtener los lados y el área mínima de las zapatas combinadas rectangulares que descansan sobre suelo elástico, y la presión del suelo sobre la zapata es lineal.
Sugerencias para las siguientes investigaciones:
- 1. Área mínima de contacto con el suelo para zapatas combinadas trapezoidales, en T y en L o esquineras que trabajen parcialmente a compresión.
- 2. Área mínima de contacto sobre el suelo para zapatas combinadas rectangulares, cuando se presentan suelos totalmente granulares (suelos arenosos) y suelos totalmente cohesivos (suelos arcillosos), el diagrama de presiones es diferente al que aquí se presenta, ya que el diagrama de presiones es parabólico.
Referencias
Algin, H. M. (2000). Stresses from linearly distributed pressures over rectangular areas. International Journal Numerical Analytical Methods in Geomechanics, 24(8), 681-692. https://doi.org/10.1002/1096-9853(200007)24:8<681::AID-NAG89>3.0.CO;2-X.
Algin, H. M. (2001). Vertical stress formula for pressure over rectangular areas. Géotechnique, 51(8), 719-722. https://doi.org/10.1680/geot.2001.51.8.719.
Algin, H. M. (2007). Practical formula for dimensioning a rectangular footing. Engineering Structures, 29(6), 1128-1134. https://doi.org/10.1016/j.engstruct.2006.08.009.
Aydogdu, I. (2016). New iterative method to calculate base stress of footings under biaxial bending. International Journal of Engineering & Applied Sciences (IJEAS), 8(4), 40-48. https://doi.org/10.24107/ijeas.281460.
Bezmalinovic-Colleoni, A. S. (2016). Fórmulas analíticas para la presión de contacto lineal en fundaciones rectangulares altamente excéntricas. IX Chilean Congress on Geotechnical Engineering, Chilean Geotechnical Society, Universidad Austral de Chile.
Coduto, D. P. (2001). Foundation design principles and practices. New Jersey: Prentice-Hall, Inc.
Galvis, F. A., & Smith-Pardo, P. J. (2020). Axial load biaxial moment interaction (PMM) diagrams for shallow foundations: Design aids, experimental verification, and examples. Engineering Structures , 213, 110582. https://doi.org/10.1016/j.engstruct.2020.110582.
Girgin, K. (2017). Simplified formulations for the determination of rotational spring constants in rigid spread footings resting on tensionless soil. Journal of Civil Engineering and Management, 23(4), 464-474. https://doi.org/10.3846/13923730.2016.1210218.
Highter, W. H., & Anders, J. C. (1985). Dimensioning footings subjected to eccentric loads. Journal of Geotechnical Engineering ASCE, 111(5), 659-665. https://doi.org/10.1061/(ASCE)0733-9410(1985)111:5(659).
Irles, R., & Irles, F. (1992). Alternativa analítica a la determinación de tensiones bajo zapatas rectangulares con flexión biaxial y despegue parcial. Informes de la Construcción, 44(419), 77-89. https://dialnet.unirioja.es/servlet/articulo?codigo=2768804.
Jiang, R., & Jiang, V. (1983). Design footing area with biaxial bending. Journal of Geotechnical Engineering ASCE , 109(10), 1337-1342. https://doi.org/10.1061/(ASCE)0733-9410(1983)109:10(1337).
Konapure, C. G., & Vivek, B. (2013). Analysis of Combined rectangular footing by Winkler’s model and finite element method. International Journal of Engineering and Innovative Technology, 3(5), 128-132. https://www.ijeit.com/Vol%203/Issue%205/IJEIT1412201311_21.pdf.
Luévanos, A. (2014). Design of boundary combined footings of rectangular shape using a new model. DYNA, 81(188), 199-208. https://doaj.org/article/ab25e432cead4654a7a140a08a8fd804.
Luévanos, A. (2016). A mathematical model for the dimensioning of combined footings of rectangular shape. Revista Técnica de la Facultad de Ingeniería Universidad del Zulia, 39(1), 3-9. http://ve.scielo.org/scielo.php?script=sci_abstract&pid=S0254-07702016000100002&lng=en&nrm=iso&tlng=es.
Luévanos, A., Barquero, J. D., López, S., & Medina, M. (2017). A comparative study for design of boundary combined footings of trapezoidal and rectangular forms using new models. Coupled Systems Mechanics, 6(4), 417-437. https://doi.org/10.12989/csm.2017.6.4.417.
Özmen, G. (2011). Determination of base stresses in rectangular footings under biaxial bending. Teknik Dergi Digest, 22(4), 1519-1535. http://www.imo.org.tr/resimler/dosya_ekler/7b559795bd3f63b_ek.pdf?dergi=472.
Peck, R. B., Hanson, W. E., & Thornburn, T. H. (1974). Foundation engineering. 2nd ed. New York: John Wiley and Sons.
Ravi-Kumar, R. C., Satish-Kumar, M., Kondala-Rao, M., & Gopika, N. (2018). Numerical analysis of rectangular combined footings resting on soil for contact pressure. International Journal of Civil Engineering and Technology, 9(9), 1425-1431. http://iaeme.com/Home/issue/IJCIET?Volume=9&Issue=9.
Rawat, S., Mittal, R. K., & Muthukumar, G. (2020). Isolated rectangular footings under biaxial bending: a critical appraisal and simplified analysis methodology. Practice Periodical on Structural Design and Construction, 25(3). https://doi.org/10.1061/(ASCE)SC.1943-5576.0000471.
Rodríguez, J. A., & Aristizabal, J. D. (2004). Presiones en zapatas rígidas de forma arbitraria sometidas a carga axial excéntrica. Revista Internacional de Desastres Naturales, Accidentes e Infraestructura Civil, 4(1), 67-82. https://www.scipedia.com/wd/images/2/27/Draft_Content_636675925Rodriguez-Gutierrez_Aristizabal-Ochoa_a.pdf.
Rodriguez, J. A., & Aristizabal, J. D. (2013a). Rigid spread footings resting on soil subjected to axial load and biaxial bending. I: simplified analytical method. International Journal of Geomechanics-ASCE, 13(2), 109-119. https://doi.org/10.1061/(ASCE)GM.1943-5622.0000218.
Rodriguez, J. A., & Aristizabal, J. D. (2013b). Rigid spread footings resting on soil subjected to axial load and biaxial bending. II: Design Aids. Internacional Journal of Geomechanics-ASCE, 13(2), 120-131. https://doi.org/10.1061/(ASCE)GM.1943-5622.0000210.
Teng, W. C. (1979). Foundation design. New Jersey: Prentice-Hall Inc.
Velazquez, F., Luévanos, A., López, S., Medina, M., & Sandoval, R. (2018). Numerical experimentation for the optimal design for reinforced concrete rectangular combined footings. Advances in Computational Design, 3(1), 49-69. https://doi.org/10.12989/acd.2018.3.1.049.
Vitone, D. M. A., & Valsangkar, A. J. (1986). Stresses from loads over rectangular areas. Journal of Geotechnical Engineering ASCE , 112(10), 961-964. https://doi.org/10.1061/(ASCE)0733-9410(1986)112:10(961).
Vivek, B., Arkal, L. S., Bandgar, R. V., & Kalekhan, F. A. S. (2014). Comparative study on conventional and simplified elastic analysis of rectangular combined footing. International Journal of Research in Engineering and Technology, 3(4), 422-427. https://ijret.org/volumes/2014v03/i04/IJRET20140304076.pdf.
Young, W. C., & Budynas, R. G. (2002). Roark's formulas for stress and strain. 7th ed. New Jersey: McGraw-Hill.
Zeevaert, L. (1973). Foundation engineering for difficult subsoil conditions. Van Nostrand Reinhol Co.
Anexo
Notas