Original research

This work is licensed under Creative Commons Attribution 4.0 International.
Received: 04 January 2018
Accepted: 02 February 2018
DOI: https://doi.org/10.18046/syt.v16i44.2726
Abstract: The usage of real-time tracking systems for vehicles has demonstrated to be a viable and economical option, entailing in more control and management of the fleet, plus the reduction of the logistics costs of companies using them. Since 2006 in Cuba, there is a fleet control and management system employed by almost all the companies, which hire a variant of the service in a differed manner; i.e., the data are not processed in real-time. In this research paper, we propose the design of a device based only on open source hardware/software components allowing the real-time vehicle tracking. Our proposal is suitable for the conditions of the country where it was developed (Cuba), presenting high functionality than other proposals. For the design, we employed an Arduino UNO controller board, an Adafruit FONA808 GPS/GSM module, and other accessories. As per the performed experiments, the proposed hardware/software architecture complies with the operation, configuration, and security requirements to achieve a viable product from the economical and environmental approaches.
Keywords: Real-time vehicle tracking, GPS, GSM, Arduino.
Resumen: La utilización de sistemas de rastreo de vehículos en tiempo real ha demostrado, a nivel mundial, ser una opción viable y económica que se traduce en el control y gestión de la flota y la reducción de los costes de logística de la empresa que lo emplee. En Cuba existe desde 2006 un Sistema de Gestión y Control de Flota, el cual se aplica casi en la totalidad de las empresas que lo contratan en su variante de forma diferida, es decir, los datos no se procesan en tiempo real. En este trabajo se propone el diseño de un dispositivo basado solamente en componentes de hardware y software libre que permite el rastreo de vehículos en tiempo real adecuado a las condiciones del país, un producto con mayor funcionalidad que el aplicado hasta el momento. Para el diseño se utilizó una placa microcontroladora Arduino UNO, un módulo GPS/GSM Adafruit FONA808 y otros accesorios. Según los experimentos realizados, la arquitectura de hardware y software propuesta, cumple con las exigencias de funcionamiento, configuración y seguridad requeridas para lograr un producto viable desde el punto de vista económico y medioambiental.
Palabras clave: Rastreo de vehículos en tiempo real, GPS, GSM, Arduino.
Resumo: O uso de sistemas de rastreamento de veículos em tempo real tem mostrado, em todo o mundo, ser uma opção viável e econômica que se traduz no controle e gerenciamento da frota e na redução dos custos logísticos da empresa que o utiliza. Em Cuba, existe um Sistema de Gestão e Controle de Frotas desde 2006, que é aplicado quase em todas as empresas que o contratam em sua variante de forma diferida, ou seja, os dados não são processados em tempo real. Neste trabalho, é proposto o desenho de um dispositivo baseado apenas em componentes de hardware e software livre que permite o rastreamento de veículos em tempo real apropriado às condições do país, um produto com maior funcionalidade do que o aplicado até agora. Para o desenho utilizou-se uma placa micro controladora Arduino UNO, um módulo GPS / GSM Adafruit FONA808 e outros acessórios. De acordo com os experimentos realizados, a arquitetura de hardware e software proposta atende aos requisitos operacionais, de configuração e de segurança requeridos para alcançar um produto viável do ponto de vista econômico e ambiental.
Palavras-chave: Rastreamento de veículos em tempo real, GPS, GSM, Arduino.
I. Introduction
A vehicle tracking system combines the use of automatic location services in individual vehicles with software that collects, processes, and visualizes data of the fleet. Currently, in an international scale, for every company or person having transportation vehicles, having satellite tracking system offer considerable advantages such as the management and real-time control of the vehicle fleet. This option entails some costs reduction using several functionalities and applications; furthermore, it provides an efficient route planning, optimizing the fuel usage. A cost reduction is also achieved due to the avoidance of larger inactivity time periods and unnecessary travelled kilometers, increasing the productivity and profitability.
Other advantages of these real-time monitoring systems are: the ability to supervise the speed; the ability to avoid thefts; a reduction in the maintenance costs; the ability to assess the driver’s behavior via his/her route history, speed, trajectory, and times; and the creation of geofences which alert when the vehicle does not comply with the trajectory limited by the client.
In Cuba, the national entity in charge of the control, supervision, and implementation of the Fleet Control and Management System [SGCF, Sistema de Gestión y el Control de Flota] is the Fleet Control and Management Department [DSGCF, Dirección de Gestión y Control de Flota]. The SGCF controls and supervises the implementation in companies, governmental entities, and control authorities in order to increase the efficiency in the transportation methods (either by land or water). Likewise, the SGCF looks after the fuel saving and it prevents the unwanted acts and criminal actions. The system is currently installed in more than 450 transportation buses and in more than 30,000 vehicles in all the provinces (González Suárez et al., 2016).
In this research, we propose the following scientific problem: in most of the Cuban companies using vehicle tracking systems, the information processing is performed in a differed manner, i.e., after the vehicle ends its route and the data has been downloaded to a monitoring station with the vehicle in the headquarters. Consequently, a real-time tracking is not performed. For this reason, seeking to reduce costs in logistics and to improve the resources use in a company with means of transportation, the use of real-time tracking systems is required.
We plan as the general objective to propose a hardware/software open source architecture to allow the control of the vehicle fleet in real-time. From this general objective, we arrange several specific objectives: to analyze the different technologies employed in a real-time vehicle tracking system; to propose an open source hardware architecture to comply with the real-time vehicle tracking system; and to assess the effectiveness of the designed device through experimental tests.
This paper is organized as follow: section II presents the results of a bibliographic review in the topic, section III presents the proposed software/hardware architecture for the device design. Finally, Section IV shows the results of the experiments performed to demonstrate the usefulness of the device.
II. Related Work
Several research works have been developed around the world to solve the vehicle tracking problem, we highlight the ones mentioned below.
Verma and Bhatia (2013) developed a tracking system using a GPS receiving module to obtain the vehicles location, they also used a SIM300 module, which provides GSM communication features, a CMOS microcontroller branded ATmega 16 with 8 bits to communicate all the components, a MAX232 integrated circuit to convert the TTL-RS232 voltage levels, and an LCD screen with resolution of 16x2 pixels. Their software –written in C– provides the interface between the modules, it receives the location via GPS and transmit it via GPRS. In the client side, a web application was developed using Google Maps, where the coordinates are received and the location plus the distance travelled are showed. Further, the possible routes to reach the destination are also displayed.
Ramani, Suthanthiravanitha, Selvaraju, and Thiruppathi (2013) developed a tracking system able to lock the vehicles, which tracks the vehicle location and it can turn off the engine and disable the door locks in case of theft. The system is activated/deactivated with a master password and the employed hardware was an AT89c52 microcontroller, a GPS module, a SIM3000 GSM modem, a keyboard, an LCD screen, relays and their corresponding triggers for the engine and locks, loud alarms, and infrared transmitters/receivers. If a robbery is detected via the IR sensors, an SMS is sent to the owner with the location of the car.
Jian-Ming, Jie, and Guang-Hui (2012) describe an anti-theft system for vehicles using GPS and GSM modules. The system uses a high-speed C8051F120 chip and it detects the stolen car using a vibration sensor. The system “stays in touch” with the owner through the GSM module for the safety and trustworthiness of the vehicle.
Fleischer, Nelson, Sowah, and Bremang (2012) describe the development and implementation of a tracking and alert system using GPS and GSM. The system allows the transport companies to track their vehicles in real-time and it provides safety against robbery and accidents.
Vázquez, Palacios, Córdova, and Romero (2016) describe the design and implementation of a mobile device for the gathering, transmission, and visualization of the vehicle position; this information is sent towards a remote terminal composed by a working station and a wireless access point. The authors employ a Parallax GPS module, a Lantronix serial-ethernet converter, an LCD screen, and an access point, all ruled by a PIC16F870 microcontroller.
In general terms, the most employed technologies in the devices for the vehicle tracking activity include the Global Navigation Satellite System [GNSS], which embraces GPS and GLONASS satellites to obtain the vehicle location.Further, the cellular networks providing communication to remote stations are widely used. Access to both is via GPS and GSM hardware modules, respectively. Moreover, a microcontroller unit is employed to establish the communication between those modules. On the other hand, a centralized station receiving the information from the remote device and visualizing the vehicle locationand other information in OpenStreetMaps or Google Maps is generally part of the tracking systems. The general architecture of a vehicle tracking system is showed in Figure 1.
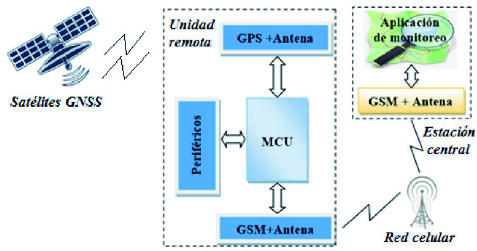
Figure 1
General scheme of a vehicle tracking system architecture
The previously analyzed solutions solve the vehicle tracking problem, but they have some disadvantages such as the use of GPS and GSM modules with RS232 interfaces, non-compatible with the TTL levels handled by the microcontrollers. Therefore, some additional hardware is required.
The use of online maps is a disadvantage in countries such as Cuba, since they require a fast internet access to handle large amounts of data. This feature is not available in all the entities with the required quality for the real-time tracking application. The use of the added value microcontroller –using sensors, actuators, keyboards, and visualization elements– is an advantage in several of the analyzed systems, since –besides their communication abilities– they use analog and digital inputs and outputs, which can enhance the system functionalities.
III. Hardware and Software Architecture of the Device
We propose the use of the Arduino open source hardware and software as our microcontroller unit, since it consists on a plaque including a microcontroller with all the necessary circuitry for its correct operation, it also has the technological requirements to process the GPS and GSM information, and it also has the necessary hardware for the connection to the corresponding input/outputs of the processor modules, sensors, and actuators that are part of the proposed system (“What is...”, 2016).
For the GSM Network interface and the GNSS satellites, we selected the Adafruit FONA808 GSM + GPS breakout (see Figure 2) because it has a GPS receiver with good accuracy (2.5 meters approximately) and a GSM network interface with the frequency bands currently operating in Cuba. Also, the module allows voice calls and the sending of SMS messages and data via GPRS. It has a serial interface for the AT commands (coded instructions forming the communication language with the module) and it is also compatible with any Arduino (“Adafruit FONA...”, 2016).

Figure 2
Adafruit FONA808
For the local storage of the information, we used the Adafruit SD/microSD module (“SD card...”, 2016), which consists on a board containing the interface between the SD socket to a standard header of 0.1” by 6 pins (Figure 3). The communication between the FONA808 with the GPS satellites employs a 50 Ω GPS passive antenna (“Passive GPS...”, 2016) and for the GSM interface, we used an Itead Studio antenna with an SMA connector to a uFL cable (“GSM antenna...”, 2016). The power supply of the FONA808 is provided by a LiPo battery of 3.7 V and 1,200 mAh with a 2-pin JST connector.
Figure 3
SD module
The proposed hardware architecture of the tracking device is shown in Figure 4 andit is based on the general architecture displayed in Figure 1. The main component is composed by the FONA808 module, where its objective is to achieve the connection with the GPS satellites through the receiving antenna. Furthermore, that module must also achieve the GSM interface through the corresponding antenna and a SIM card providing the data service in the cellular network. Both antennas are connected to the FONA808 board via the uFL connectors, whilst the SIM card is put in the corresponding socket. The LiPo battery is connected via the JST connector; besides, this FONA808 module is connected with the Arduino via a serial port. The SD module is able to communicate via the SPI protocol and it is directly connected to the Arduino.
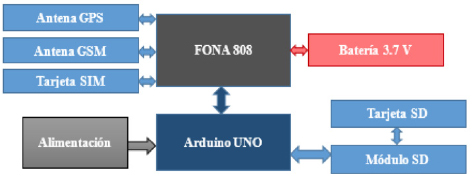
Figure 4
Hardware architecture of the device
In the Arduino UNO (Figure 5), the device control application is running. It is programmed in the Arduino language (which is based on C++). Its corresponding flow diagram is shown in Figure 6.
Figure 5
Arduino UNO
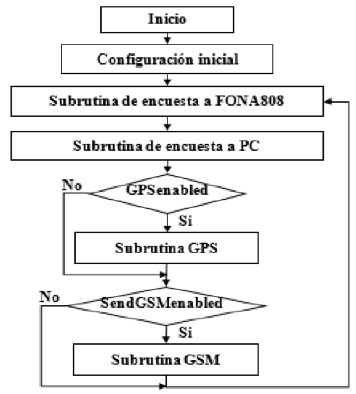
Figure 6
Flow diagram of the main program
The program starts with a device configuration block. Firstly, the input/output pins of the Arduino are configured. We started in the serial hardware port, which serves to communicate a personal computer with the device. This process also initializes the SPI communication with the SD card and the serial port communication implemented from the software with FONA808. The FONA808 is initialized and the device configuration values are loaded from the EEPROM. Besides, the default device configuration values (administrative number, SIM card unlock code, GPS connection times, sending of the frame via the mobile network, and maximum speed) are also initialized and, consequently, the SIM card is unlocked.
After the configuration, the program executes an infinite cycle, which is divided in several subroutines. The consulting subroutine towards the FONA808 device initially consults about the presence of SMS or call notificationson its serial port. In case of receiving a positive response, it reads the received text chain and it identifies the notification type. If a phone call is received, the system automatically hangs up; if a text message is received, it checks if it comes from the administrator number and it also check it has useful data for the program configuration. In case neither of both options are complied, the message is ignored.
Through this message, the administrator can change all the device configuration parameters from an Android application destined for it. At the end of the subroutine, the received message is eliminated.
The subroutine of consulting to a PC starts by establishing the serial communication only valid with a destined application for it through an authentication process. In other case, any data received in the serial port will be ignored. From this application, the device default parameters are configured and they will be stored in the EEPROM. Furthermore, it is possible to control and configure the device while it is operating and the sending of information to the PC is also feasible in this mode.
All the frames sent between the device, the PC software, and the application in the base station comply with the structure shown in Figure 7. The fields are: Header (3 bytes): 0xCC 0xCC 0xCC; Message type (1 byte): information, control, configuration, or alarm; Data (variable size as per the type, restricted to a maximum of 135 bytes for an SMS); and Checksum: error verification method.

Figure 7
Frames format (within brackets, the size in bytes of each field)
The GPS subroutine is executed when it is enabled and it depends on the configured period. First, the positioning state (fix) of the GPS is checked; this can be “No Fix” when the GPS does not provide a valid location, “2D Fix” or “3D Fix” when the location is accurate. After, the frame with the GPS location is requested to the FONA808, which is stored in a local variable. From here, the following data are extracted: UTC time, latitude, longitude, speed (in km/h), height (in meters above sea level), and course (in grades). These data are coded and stored in the device memory (SD card) in frames (registers) of 27 bytes in size, named GPSIF. The file where the registers are stored has “.log” extension and its name is generated from the current date/time. Besides, if the user requires, an alarm message can be immediately sent if the system detects a speed excess in the automobile.
The GSM subroutine is executed when it is enabled and as per the configured period. Within it, the SMS/MMS message is configured as per the selected options by the user and it is sent to the base station. First, the GSM signal intensity is checked [RSSI, Received Signal Strength Indication] and, if it is under -90 dBm (minimum value as per the manufacturer to detect signals and correctly send data) the current frame is queued in the “frames to be sent” queue. If a good signal is received later, the current GPSIF frame and all the other queued are introduced in the text message data field. An SMS can contain up to 5 GPSIF frames and many messages as required will be sent (in an MMS, up to 37 frames can be sent). Once the data field and the message are formed, the checksum is calculated and the message is sent to the administrator phone number.
We also developed a simple software for PC using open source libraries for Qt Creator. This software can communicate with the serial port of the device and it has a graphical user interface [GUI], easing the user manipulation and the entering of the device default data. It is also possible to control the operation, receive and process information.
As the software in the base station, we developed an application for the Android platform using Android Studio. This application provides a GUI that, essentially, allows to decide and visualize the data with the GPS information received from the tracking device; it also allows the control of the device remotely.
IV. Results and Discussion
The selected hardware components, together with the corresponding connections and SIM/SD cards inserted are shown in Figure 8. They form the prototype employed for the testing.

Figure 8
Prototype device
It works as follow: before the initialization of the device, it must be configured through the PC software. The data to configure are mainly the default working parameters (i.e., the administrator phone number and the PIN to unlock the SIM card). This is performed via the serial port using the physical connection with the PC and from the Arduino USB port.
Once the device is correctly configured, it is ready to operate independently. When the power is on, the Arduino executes the initial configuration subroutine described in Section III, leaving the FONA808 module active.After that, the program executes the infinite cycle and wait for the orders sent by the administrator user via the cellular network. These orders can be sent as many times as the administrator desires (turn on/off the GPS, enable/disable the information sending via the cellular network, and change the configuration settings). Additionally, the device can be controlled from the PC application if it is physically connected to it. The GPS information will be stored and encrypted in the SD card and it will be available for further processing. Also, the system can send the information to the administrator phone number (if desired), where the monitoring application will start, allowing the data processing in real-time.
In order to ensure the effectiveness of the device, we performed a first experiment with the aim to assess the data processing in the SD card in a differed manner, together with the precision of the GPS data. The device was installed inside a Peugeot 205 vehicle, we powered it from a laptop computer, and we activated the GPS consulting subroutine from the PC application. The data were processed afterwards from the same application.
We did a test drive inside the Universidad Central “Marta Abreu” of the Las Villas [UCLV], starting from the Electric Engineering Faculty [FIE, Facultad de Ingeniería Eléctrica] to the Los Sauces hotel. It was a round-trip and the GPS was consulted each 10 seconds. The cold start of the GPS took 40 seconds approximately and a total of 80 GPS frames were processed, where 4 were lost during this cold start.
Figure 9 shows the map of the locations, together with the speed (km/h) processed in Google Maps (Los Sauces – FIE trip). Here, it is possible to observe that the localization error is only in the order of a few meters. We visually compared the speed of the vehicle with the sent from the device towards the PC and we had a coincidence of 100%, with an error not larger than 1 km/h. The battery usage was only 2%.
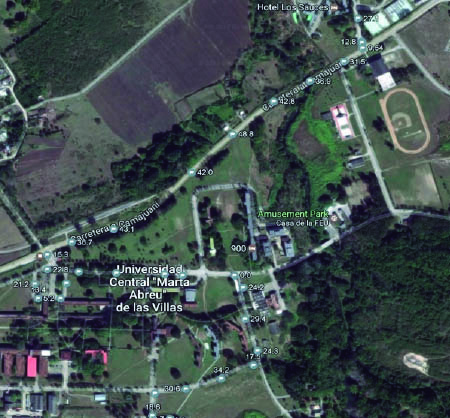
Figure 9
Sample of the obtained locations in the first experiment
We performed a second experiment to assess the data processing in the real-time variant. The device was installed inside the vehicle, we powered on from a computer and we activated the GPS consulting subroutine from the Android application installed in the administrator phone. The GSM subroutine was activated after receiving the first valid GPS frame. The data were continuously received and unencrypted in the same application and they were stored in the device memory.
We did a test trip between Yaguajayup to the UCLV via the north circuit (see Figure 10), consulting the GPS each 30 seconds and sending the frames via SMS each 2 minutes. 44 locations were sent to the device in 27 SMS, all of them were received by the base station. From these numbers, 17 locations were queued in the zones without mobile coverage. Zero frames were lost and the battery use was less than 5%.
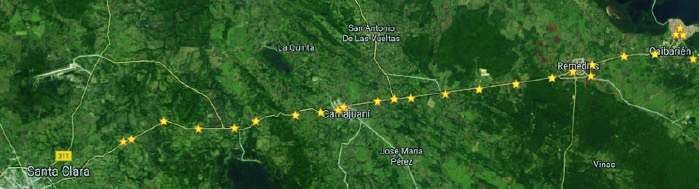
Figure 10
Locations of the Caibarién-UCLV trip obtained via SMS
The price in dollars of all the components in the device was U$ 97, this value can be slightly different according with the SD capacity. The cost for license payments for both hardware and software was null, since all the used components are open source. The mobile network usage cost depends on the SMS and MMS rates, being $0.09 CUC (Cuban Convertible Peso, where 1 CUC equals 1 US dollar) and $0.01 CUC per kB as per ETECSA (2016); although, the offered data plans by the carrier can be employed to reduce even more this cost.
As per González Suárez et al., (2016), Cuba has saved 156,558.3 tons of fuel (around U$ 128 million) only with the variant related with the differed way to track vehicles. The designed device in the present research paper can operate in both operation modes: either differed or real-time. With the real-time control, the impact of saving fuel is potentially larger, although an exact value of the savings is complex to be estimated, since this variant is still widely not implemented in Cuba. In spite of this, it is possible to infer that, with a real-time control of the fleet where the position, speed, and course of the vehicles is well known, it is feasible to achieve a total control of the routes logistics and deliveries in the administrative side. Furthermore, the number of unnecessary trips and kilometers will be reduced, since there is the option to plan the route more efficiently. Events, such as speed excess, non-allowed stops, and changes in the route can be detected to take the pertinent actions, avoiding accidents, robbery, and unnecessary fuel and resource spending.
It is important to focus that the designed device was planned as a national device, complying the basic functionalities of the devices analyzed in Section II and suitable for the Cuban environment. Additionally, it is possible to enhance its features with the addition of new hardware elements and the improvement of the software capabilities. Consequently, we contribute to the policy of reducing the importing of similar finished devices. The environmental impact of our prototype is clear, since the fuel saving that can be achieved is relevant due to the fact that the greenhouse gases emitted to the atmosphere will be reduced with more efficient routes for the fleets.
V. Conclusions
From several technologies employing open source hardware and software, it is posible –and feasible– to design the architecture of a vehicle tracking device that allows the real-time and differed fleet control; this, via a solution created in, and for Cuba.
The Arduino UNO development board and the Adafruit FONA808 are amongst the most suitable technologies for the design of this device, as per the Cuban conditions.
With the designed hardware architecture, we guarantee the successful connection between all the components making the device. The proposed softwarearchitecture also guarantees its correct operation, since it allows the gathering of accurate GPS information, its corresponding encryption and frame coding as per the protocol –understandable only by the system itself–.
The communication system ensures the safety and reliability of the whole system through the communication authenticationbetween the device and the monitoring and configuration applications. The information encryption, and the frame coding understandable only by the system also guarantess acceptable levels of data security.
The performed experimental tests demonstrated the effectiveness in the proposed hardware/software architecture, by complying the operational, configuration, flexibility, and safety requirements which characterize the real-time vehicle tracking devices. Hence, the companies using these devices will reduce their logistics and maintenance costs, allowing larger fuel savings, and avoiding unexpected behaviors from the drivers.
References
Adafruit FONA 808 - Mini Cellular GSM + GPS Breakout. (2016). Retrieved from: https://www.adafruit.com/product/2542
Empresa de Telecomunicaciones de Cuba [ETECSA]. (2016). Telefonía Móvil. Retrieved from: http://www.etecsa.cu/telefonia_movil/
Fleischer, P. B., Nelson, A. B., Sowah, R. A. & Bremang, A. (2012). Design and development of GPS/GSM based vehicle tracking and alert system for commercial inter-city buses. In: 2012 IEEE 4th International Conference: Adaptive Science & Technology (ICAST). IEEE. doi:10.1109/ICASTech.2012.6381056
González Suárez, G., Iglesias, R. C., Fernández, J. L. C., Rosales, J. D. F., Domínguez, M. B. ... & Monteagudo, L. R. (2016). Movilweb, diez años de control de flotas en Cuba. In: Informática 2016. XVI Convención y Feria Internacional. Retrieved from: http://www.informaticahabana.cu/sites/default/files/ponencias/GEO044.pdf
GSM antenna with interface cable (short & SMA plug straight angle). (2016). Retrieved from: https://www.adafruit.com/products/1859
Jian-Ming, H., Jie, L. & Guang-Hui, L. (2012). Automobile anti-theft system based on GSM and GPS module. In Intelligent Networks and Intelligent Systems (ICINIS), Fifth International Conference. IEEE. doi:10.1109/ICINIS.2012.86
Passive GPS Antenna uFL - 15mm x 15mm 1 dBi Gain. (2016). Retrieved from: http://adafru.it/2461
Ramani, R., Suthanthiravanitha, S. V. H., Selvaraju, S., & Thiruppathi, M. (2013). Vehicle tracking and locking system based on GSM and GPS. I.J. Intelligent Systems and Applications, 9, 86-93.
SD card / microSD breakout module for Arduino, AVR, PIC, ARM,MSP430... (2016). Retrieved from: http://itead-europe.com
Vázquez, C. R., Palacios, E. F., Córdova, L. S. & Romero, M. (2016). Dispositivo de adquisición y transmisión de la posición de un vehículo mediante GPS y Wi-Fi. RIELAC Revista de Ingeniería Electrónica, Automática y Comunicaciones, 37, 15-27.
Verma, P. & Bhatia, J. S. (2013). Design and development of GPS-GSM based tracking system with Google map based monitoring. International Journal of Computer Science, Engineering and Applications (IJCSEA), 3, 33-40.
What is Arduino. (2016). Retrieved from: http://www.arduino.cc/
Author notes
Graduado con Título de Oro de Ingeniería Automática en la Universidad Central de Las Villas [UCLV] (Cuba, 2017). Se desempeña como graduado en adiestramiento del Departamento de Automática y Sistemas Computacionales de la Facultad de Ingeniería Eléctrica en la UCLV. Desarrolla investigación en la aplicación de tecnologías de hardware y software libres e inteligencia artificial a la solución de problemas prácticos como la gestión y el control de flotas de vehículos y la agricultura de precisión. Sus investigaciones han obtenido premios en el Fórum de Ciencia y Técnica y se han presentado en eventos, como la Convención Internacional UCLV 2017.
Ingeniero en Automática y Máster en Telemática de la UCLV (Cuba, 2001 y 2005, respectivamente), con un doctorado conjunto en Ingeniería entre la Université libre de Bruxelles (Bélgica) y la UCLV (2015). Desde 2001 es miembro del Departamento de Automática y Sistemas Computacionales de la UCLV, donde actualmente es profesor titular y jefe del departamento. Fundador del Grupo de Automatización, Robótica y Percepción, desde 2003 investiga en el diseño de sistemas empotrados y el desarrollo y aplicación de vehículos autónomos.
Ingeniero en Control Automático de la Universidad Central “Marta Abreu” de Las Villas [UCLV] (Cuba, 1994) y Maestro en Ciencias, Gerencia de la Ciencia y la Innovación del Instituto Superior de Tecnologías y Ciencias Aplicadas (La Habana-Cuba, 2010). Tiene experiencia, como especialista en automatización, en bioplantas, la fábrica de calentadores solares y baterías intercambiadoras de calor RENSOL y la Empresa de Servicios Informáticos de Ciego de Ávila (Cuba). Ha desarrollado biorreactores de Inmersión Temporal de cuarta generación en Cuba, Costa Rica y México.
