Articles
Delay-dependent stability analysis for nonlinearly perturbed and parametric uncertain heat exchanger system with time varying-delay
Delay-dependent stability analysis for nonlinearly perturbed and parametric uncertain heat exchanger system with time varying-delay
Journal of applied research and technology, vol. 17, no. 5, pp. 313-325, 2019
UNAM, Centro de Ciencias Aplicadas y Desarrollo Tecnológico
Abstract: Delay-dependent stability of network-controlled temperature control system (with feedback loop delay in the presence of time varying delays, exogenous load disturbance and parametric uncertainties) had been chosen as a task and the system was investigated by theoretical analysis. The Lyapunov-Krasovskii functional technique, expressed in LMI framework based stability criteria was used as a tool in this research. The inevitable time-delays, unknown exogenous load disturbance and parametric uncertainty are affecting the state evolution of the proposed system. The load disturbance temperature control was mathematically modeled as norm-bounded, nonlinear time varying function of current and delayed state vectors. The parametric uncertainty was modeled by using Taylor series expansion. Then, the parameters were incorporated into the delay-dependent stability analysis. In addition to the minimal number of decision variables, tighter bound integral inequality, using reciprocal convex combination lemma was employed in the analysis to obtain less conservative stability criteria. The results obtained are in accordance with the theoretically obtained in the heat exchanger and they are closer to the standard benchmark temperature-control of heat exchanger system.
Keywords: Delay-dependent stability, linear matrix inequality, Lyapunov-Krasovskii functional, nonlinear perturbations, time-varying delays, temperature control, heat exchanger, parametric uncertainty.
1. Introduction
In this fast growing communicative world, network based control/networked control system (NCSs) unit are the default modules in all modern control equipments (Cloosterman, Van de Wouw, Heemels, & Nijmeijer, 2009). These control units include: valves, actuators, sensors and Processes etc, that are connected through the communication channel (Liu & Li, 2014). In the recent years, the use on NCSs has received more attention due to The stability, flexibility, reliability, cost-effectiveness maintenance.free and flexible applications et, are some of the prerequisites of the networked control systems (NCSs) (Cloosterman et al., 2009; Lui &Li, 2014). Due to the uses of NCSs for sharing the signal/data in common network have some limitations such as network-induced time delays (Chung, Ibrahim, Asirvadam, Saad, & Hassan, 2016; Jin, Wang, & Zeng, 2015) and packet dropout (Yu, Wang, Chu, & Hao, 2004). The packet dropout is unimportant which means, we receive that all signals (input/output) are communicated in a single packet. Hence, the important issues in NCSs are the time-delays effects in the control loop. These time-delays in the NCS are inevitable, and so proper technology must be identified and incorporated (Chung et al., 2016; Cloosterman, et al., 2009; Jin et al., 2015; Liu & Li, 2014; Yu et al., 2004). The stability analysis of dynamical system with time delays is very essential part to design a controller (Gu, Chen, & Kharitonov, 2003; Malek-Zavareo & Jamshidi, 1987; Naranjo-Montoya, 2015;Oladapo, Balogun, Adeoye, Olubunmi, & Afolabi, 2017; Ramakrishnan & Ray, 2015; Wu, He & She, 2010; Venkatachalam, Prabhakaran, Thirumarimurugan, & Ramakrishnan, 2019). Certain unidentified problems, such as exogenous noise and parametric uncertainty are affecting the stability of the networked control systems (He, Liu, Rees, & Wu, 2007; Li & De Souza, 1997; Lakshmanan, Senthilkumar, & Balasubramaniam, 2011; Park, 1999; Parlakci, 2005; Ramakrishnan & Ray, 2015; Ramakrishnan & Ray, 2016; Venkatachalam & Prabhakaran, 2018). In the stability analysis, incorporated into the uncertainties are stated here (i) time-varying nonlinear load perturbations with respect to current and delayed state vector and (ii) time-varying parametric perturbations in the system. The novelty of the study is basically lies in mathematically modelling of load disturbance as a bounded nonlinear function (He et al., 2007; Lakshmanan et al., 2011; Ramakrishnan & Ray, 2016) and norm bounded type parametric perturbations (Park, 1999). The control engineering community finds it very difficult in solving these mathematical problems. A very few researchers took these challenges and put forward few mathematical models to us (Gu & Niculescu, 2003; He et al., 2007; Lakshmanan et al., 2011; Park, 1999; Parlakci, 2005; Li & De Souza, 1997; Moon, Park, Kwon, & Lee, 2001; Ramakrishnan & Ray, 2015; Ramakrishnan & Ray, 2016; Zhang, He, Jiang, Wu, & Wu, 2014). Delay dependent stability of thermal system with uncertainties being mathematical modelled as a bounded function has not been discussed in the survey. Thermal system is dynamical and depends on the temperature of the working substance (López-Morales & Valdés-Asiain, 2005; Sharma, Gupta, & Kumar, 2011). In process Industries, medical applications, generating power stations etc., are using the thermal energy is controlled over a remote control center, then the closed loop thermal control method will be finished through a communication link. In the network based thermal control unit, there is a tendency of the system parameters to drift away from the equilibrium point due to the time delay in the feedback thermal system (Sharma et al., 2011). This fact motivated us to design and study the stability of a heat exchanger system with the fundamentally sufficient parameters and conditions based on Lyapunov-Krasovskii functional method in this research work (Boyd, El Ghaoui, Feron, & Balakrishnan, 1994; Park, Ko, & Jeong, 2011). The following attempts have been carried out systematically and validated on standard benchmark of heat exchanger system:
-
The problems of delay dependent stability of temperature control system by taking into account the effect of time delays, load disturbance and parametric uncertainty.
-
The new delay-dependent stability criteria for temperature control system with time-varying delay, exogenous load disturbance and uncertain parametric using Lyapunov-Krasovskii functional is computed as less conservatism (Park et al., 2011).
2. Dyanamic model of temperature control system with delay
Let us consider the nominal time-delay system as
The mathematical modeling of heat exchanger system is
where, is a time-varying function, representing time-delay with known constant scalars and satisfying.
where, is the state vector, and are the constant matrices; and is describing the initial condition of the system (Peng & Tian, 2008; Ramakrishnan & Ray, 2015).
2.1 Temperature control system with time-varying delay
Theorem1: For the linear time-delay system considered (3), the scalars should be greater than zero in order to be globally asymptotically stable for satisfying the condition given in the relation (5). The system was considered with the following linear matrix inequalities (Park et al., 2011).
where
Solution: The above model with conditions was solved theoretically using the following constructions with LK functional technique.
where, and are real symmetric positive definite matrices. Define .
The time-derivative of the Lyapunov-Krasovskii functional along with trajectory of (3) as follows:
The time-derivative of is given by
The time-derivative of is given by
Since of (11) is expressed as an inequality as follows:
which, in other way to be expressed as follows:
The time-derivative of is given by,
Now, by using the reciprocal convex combination lemma (refer chapter 1, Lemma 9) (Park et al., 2011), (14) is expressed as follows:
with the following condition established:
Now, by combining the derivative term of , we could obtain the following condition:
This condition (17) is expressed quadratically as follows:
Now, if the condition it implies that the temperature control system in (3) satisfying (5) is asymptotically stable by using Lyapunov functional technique.
2.2 Robust stability for nominal system with nonlinear erturbation
In this section, we consider the delay dependent robust stability of the delayed temperature controlled system under time-varying and nonlinear perturbation. The state-space model of the state-delayed heat exchanger system with nonlinear perturbations is given below (Ramakrishnan & Ray, 2012)
where, and are already defined in Section 3. In (19), the terms and , represent nonlinear perturbations with respect to the current state and delayed state; they are assumed to satisfy and the following bounding conditions (Parlakçı, 2006):
Satisfying the following norm-bounded conditions:
where, and are the known scalars. A more generalized version of the condition (23), which is used in this paper, is given by
where, and are the known constant matrices of approximate dimensions; and the non-negative scalars and quantify the magnitude of the load disturbance to the temperature control system. The problem statement is given below:
To develop a robust stability criterion in LMI framework and to ascertain delay-dependent stability of the system (19) subject to the bounding conditions (20) and (21), and satisfying the condition for the single time-delay case (5), using Lyapunov-Krasovskii (LK) functional approach and reciprocally convex lemma (Park et al., 2011; Ramakrishnan & Ray, 2015).
2.2.1 Stability criterion for.temperature control system with time delay and nonlinear perturbation
Theorem2: At any time delay, the stability of the temperature control system is predominant for obtaining the proposed output, so that the delay-dependent stability of the temperature control system with nonlinear perturbation is considered as shown in the relation (19).
Solution: The temperature control system is asymptotically stable if there exist real, symmetric, positive definite matrices and ; scalar for any dimensions of free matrix such that the following LMIs hold:
where,
with
In a nut shell, the problem is regarded as the robust stability of model (19) with boundary conditions (20) and (21) and satisfying (5) is to be solved by using Lyapunov-Krasovskii functional technique and reciprocal convex lemma.
2.3 Robust stabillity for nominal system with time-delay and parametric uncertainty
A general dynamical system is considered with single time varying delay and parametric uncertainties with the relation and satisfying the conditions as given in (26).
where, are real-unknown but, norm-bounded matrix functions of and , respectively and they are represented as shown in Equation (28)(Peng & Tian, 2008).
where, is a real-unknown time-varying matrix (valve variations with respect to time) which are satisfying, and and are the real-known constant matrices that specify how the uncertain parameters of appear in the nominal system matrices. In specific, for the given scalars, the work in the following sequence investigates if system (26)-(28) is robust and stable for any time-delay satisfying the condition.
2.3.1 Stability of Temperature Control system with Time-Delay and Parametric Uncertainty
Theorem 3: In the uncertain system with time-delay (25), the given scalars and , and the proposed heat exchanger system are globally, robustly and asymptotically stable for any time-delay, satisfying (25) and for the admissible uncertainties, (26) and (27) mathematically expressed as shown in relation (28)(Aguilar-López, Acevedo-Gómez, González, Isabel, & Domínguez-Bocanegra, 2008; Li & De Souza, 1997; Park, 1999; Sun, Liu, Chen, & Rees, 2010; Ramakrishnan & Ray, 2012).
Proof: Let us reconsider the matrix inequality defined in (6). One shall replace and with and , respectively, in and rewrite the resulting inequality in the form of nominal and uncertain parts of heat exchanger system as
One can decompose and express
Substituting (30) into (29), and applying Schur’s complement (Moon et al., 2001), the LMI given in (28) is obtained. Thus, the system (25) with admissible uncertainties (26) and (27) is asymptotically stable (Gahinet, Nemirovski, Laub, & Chilali, 1995; Gu, & Niculescu, 2003; Park et al., 2011).
Remark: To solve the stability factor presented in Theorems 1, 2 and 3, they are formatted as constraint optimization problems, as follows:
such that
3. Results and discussion
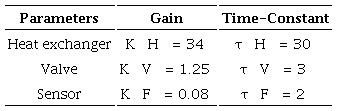
The stability of thermal control system with single time varying delay, load disturbance and parametric uncertainty model was constructed by using MATLAB/LMI toolbox (Gahinet et al., 1995). the gains and time constants of the thermal system used in the analysis are shown in Table 1(Sharma et al., 2011; Veeraragavan, Duraisamy, Murugan, & Krishnan, 2017; Venkatachalam & Prabhakaran, 2018).
For the aforesaid thermal system parameters, with delay-free condition, the system stability curve can be easily drawn; which is illustrated in Fig. 1. From the Fig. 2, it is clear that for all values of gains of controller lying below the stability curve, the closed-loop thermal system is asymptotically stable (Veeraragavan et al., 2017). From the stability curve we can choose the controller parameter approximately for calculate the delay margin. For these controller gains, the closed loop system converges asymptotically to equilibrium point as illustrated in Fig. 3, for a unit step perturbation in temperature control system output variable (from its equilibrium value). When the network delay is made zero, the system Equation (3) becomes
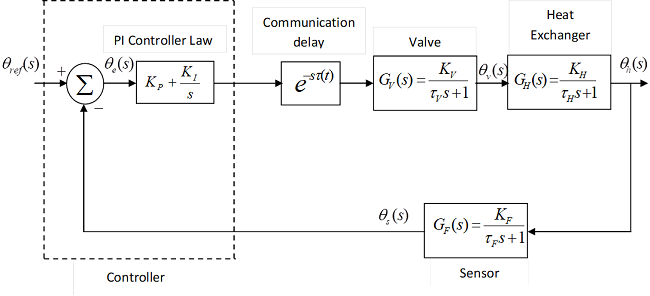
Fig.1.
Block diagram of closed loop temperature control with single time delay.
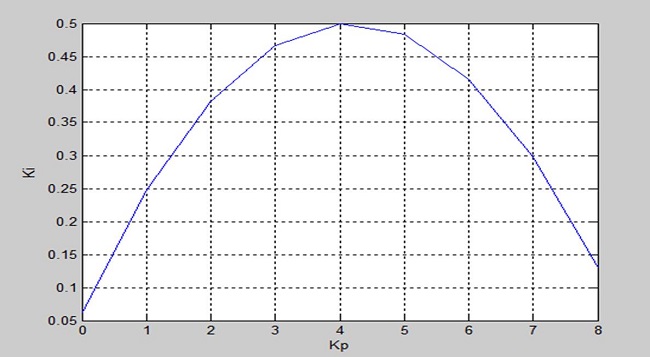
Fig.2.
Maximum value of KI for different values of KP.
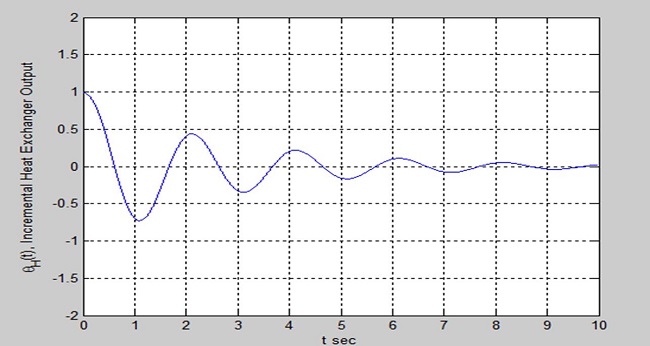
Fig.3.
Evolution of ∆θHtfor zero delay condition.
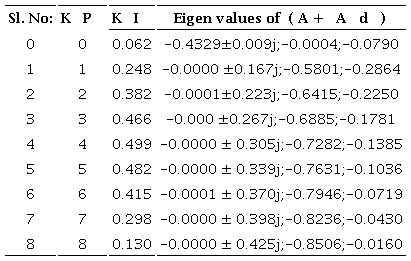
Now, the Eigen values of the (thermal control) system state matrices are observed that depend on the controller gains. Table 2 shows that the maximum values of integral controller for a fixed value of proportional controller gain, for which, the thermal control system is on the verge of instability, i.e . having one complex-conjugate pair of eigen values on the axis. It is observed from the Fig. 2 that there is a tendency for the curve to decrease gradually with increase of .
3.1 Temperature control system with time-delay
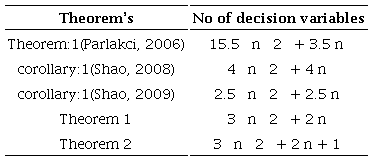
The temperature control system with time delay as stated in the Theorem 1 was executed for various range of PI controller gain (, and the maximum value of were obtained and tabulated (Table3). In the result were , chosen and obtained the maximum value of time delay is 8.6801seconds. It was found that the system becomes unstable, even when the delay margin increases to the value of 9 seconds. This result clearly brings out the effect of delay on the delay-dependent stability of the temperature control system as shown in Fig.4. Hence, when compared to earlier theorems (Parlakci, 2006; Shao, 2008,2009) the results presented in this paper portray a more realistic system operating condition and the proposed stability criterion has less number of decision variables compared to the earlier results as given in Table 8.
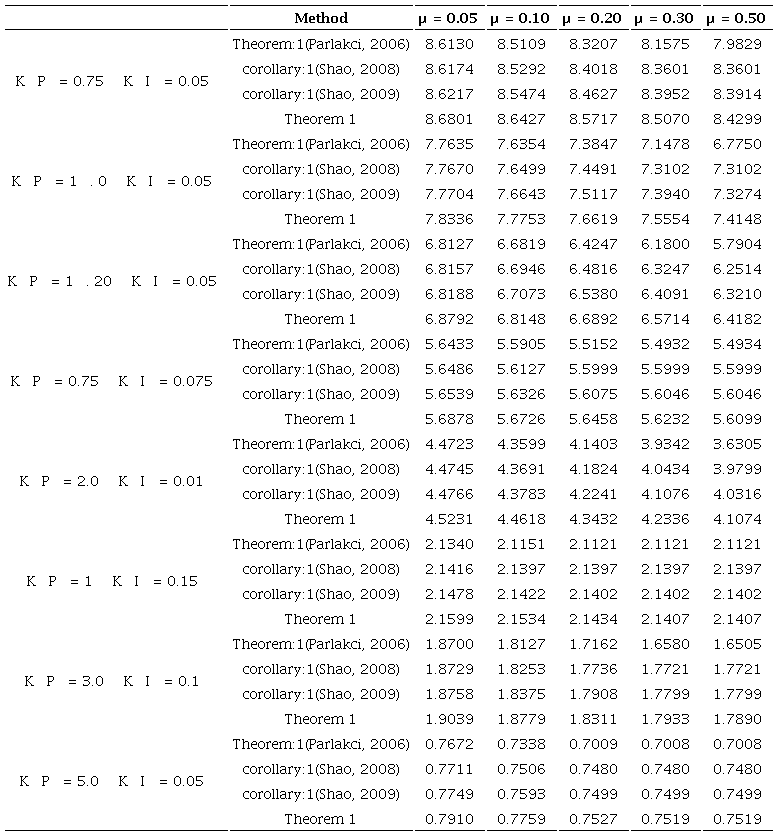
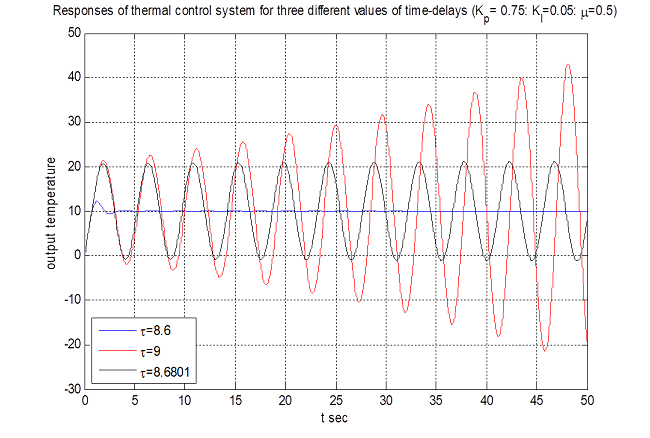
Fig. 4.
Step Response to the thermal control system with various delays
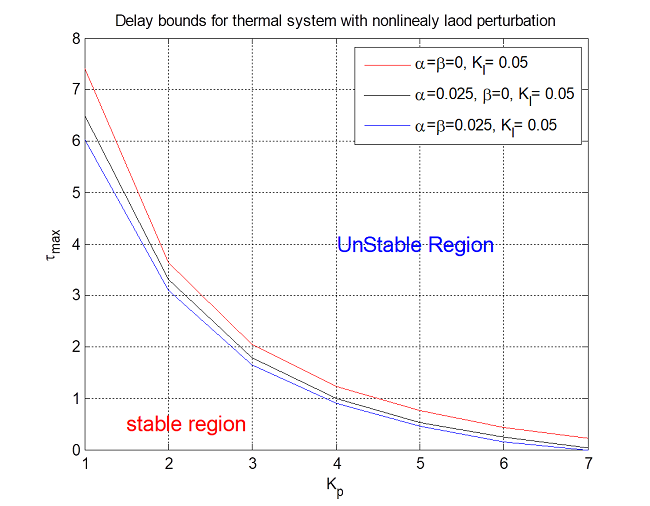
Fig.5.
Maximum delay margin for thermal control system with various values of KP, α and β
3.2 Temperature control system with time delay and nonlinear
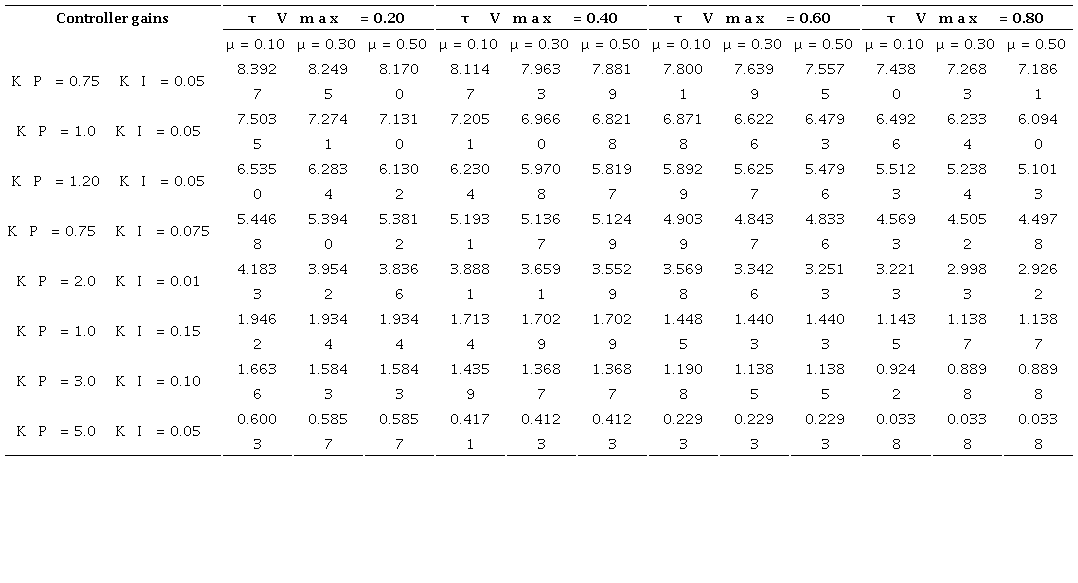
In this section, the study corresponding to temperature control system with single time-varying delay, and the exogenous load disturbance effect of the temperature control system is assumed to satisfy the norm-bounded condition given in (23); the both matrices G and F of values are taken as (Ramakrishnan, Venkatachalam, & Ray, 2015) where, is the system state vector size . Using convex optimization problem stated in remark for Theorem 2, the maximum value of the delay bound is calculated for temperature control system for various values of and , and for various controller parameter gain settings (viz, and ); they are listed respectively, in Tables 4, 5, 6. From the tables, it is understandable that as the values of and increases, the load disturbance effects for the temperature control system become more pronounced, and under such perturbed temperature control system conditions, the maximum network delay that the PI controlled temperature control system can withstand, without losing stability decreases. In the result, is varying from and chosen and obtained the maximum value of time delay with various values of load disturbance as shown in Fig. 6. This result clearly brings out the effect of load disturbance on the delay-dependent stability of the temperature control system. The results presented in this paper depict a more realistic system operating conditions.
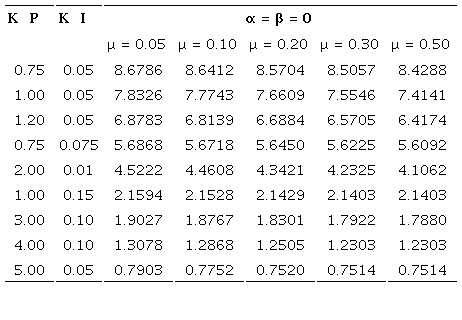
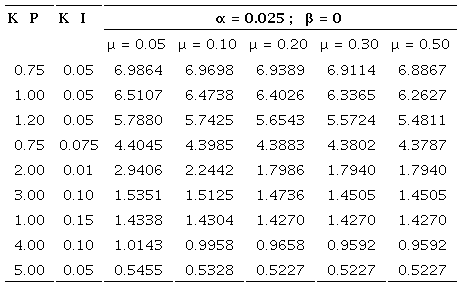
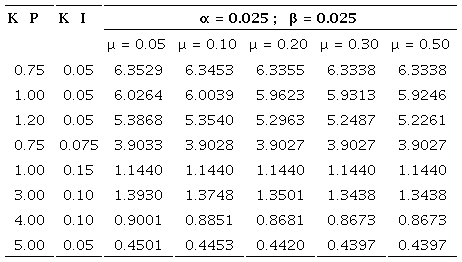
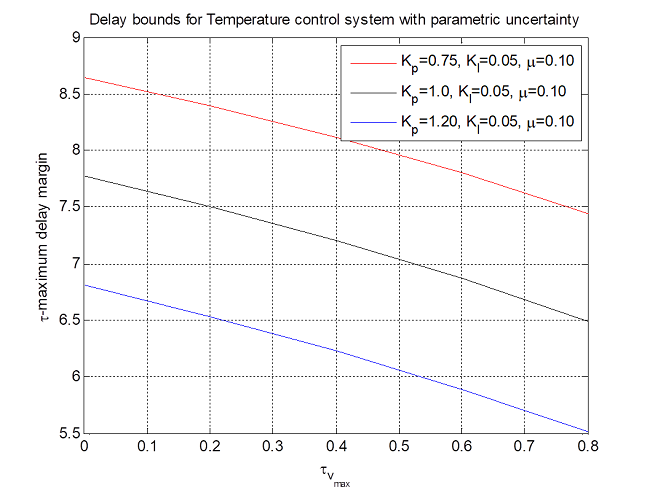
Fig. 6.
Maximum delay bounds for thermal control system with various range of uncertainty
3.3 Maximum allowable delay bounds for temperature control system with parametric uncertainty
In this section, the temperature control system with parametric uncertainty (parametric variation i.e. time constant of valve is varying with respect to time) are demonstrated and the applications of the Theorem 3 are presented, in order to show the effectiveness of the new robust stability criteria. The maximum value of the delay bound is calculated for temperature control system for various values of , and for various controller parameter gains settings (viz, and ); they are listed respectively in Table 7. From the tables, it is clear that as the value of increases, the parametric variation effect on the temperature control system become more pronounced as shown in Fig. 6, and under such parametric uncertain temperature control system conditions, the maximum network delay that the PI controlled temperature control system can withstand without losing stability decreases. This result clearly brings out the effect of parametric variations on the delay-dependent stability of the temperature control system. The results present in this paper depict a more realistic system operating conditions.
4. Conclusion
Temperature control system with time delay, exogenous load disturbance and parametric variations was modeled and constructed, using the tool of simulink in MATLAB software. The non linear perturbed heat exchanger system was formulated and modeled in terms of the current and delayed state vectors. Similarly, the parametric uncertainty was also mathematically formulated, and modeled (using Taylor series expansion) with norm bounded type uncertainties. The stability of these systems was studied systematically by using the Lyapunov-Krasovskii functional method. The reciprocal convex combination lemma was employed in the stability analysis to make it less conservative. All the models were validated with the bench mark of the temperature controller system under different parametric uncertainties. The deduced result of this work is more realistic in operating conditions in real time temperature control system.
Acknowledgement
One of the authors (Dr. D. Prabhakaran) is grateful to All India Council for Technical Education (AICTE), New Delhi, India for financial support (File No. 20/AICTE/RFD/RPS (Policy-II) 23/2013-16) . The authors would like to express their sincere thanks to Dr. S. R. K. Prasad (Correspondent, CIT), Dr. R. Prabhakar (Secretary, CIT), Dr. V. Selladurai (Principal, CIT), Dr. M. Thirumarimugan (Head of the Department of Chemical Engineering, CIT) for their useful discussions and encouragement during the course of work. Also we like to acknowledgement Dr. K. Ramakrishnan (Associate Professor of Electrical and Electronics Engineering, Pondicherry Engineering College, Pondicherry, India) and Dr. T and encouragement during the course of work. Also we like to acknowledgement Dr. K. Ramakrishnan (Associate Professor of Electrical and Electronics Engineering, Pondicherry Engineering College, Pondicherry, India) and Dr. T. Venkatachalam (Associate Professor of Physics, Coimbatore Institute of Technology, Coimbatore, India) for their valuable help in studying dynamical system with time delays.
References
Aguilar-López, R., Acevedo-Gómez, R., González, N., Isabel, M., & Domínguez-Bocanegra, A. R. (2008). Robust generic model feedback under model uncertainties: application of a tubular reactor for the treatment of industrial plating wastewater. Journal of applied research and technology, 6(3), 184-203.
Boyd, S., El Ghaoui, L., Feron, E., & Balakrishnan, V. (1994). Linear matrix inequalities in system and control theory. SIAM studies in Applied Mathematics, (Vol. 15).
Chung, T. D., Ibrahim, R. B., Asirvadam, V. S., Saad, N. B., & Hassan, S. M. (2016). Adopting ewma filter on a fast sampling wired link contention in wirelesshart control system. IEEE Transactions on Instrumentation and Measurement, 65(4), 836-845.
Cloosterman, M. B., Van de Wouw, N., Heemels, W. P. M. H., & Nijmeijer, H. (2009). Stability of networked control systems with uncertain time-varying delays. IEEE Transactions on Automatic Control, 54(7), 1575-1580.
Gahinet P., A. Nemirovski,. A. J. Laub, & Chilali. (1995). LMI Control Toolbox User’s Guide: Natick, MA: The Mathworks, IMS.
Gu, K., Chen, J., & Kharitonov, V. L. (2003). Stability of time-delay systems.. Bikhauser Boston, 1-356.
Gu, K., & Niculescu, S. I. (2003). Survey on recent results in the stability and control of time-delay systems. Journal of dynamic systems, measurement, and control, 125(2), 158-165.
He, Y., Liu, G. P., Rees, D., & Wu, M. (2007). Improved delay-dependent stability criteria for systems with nonlinear perturbations. European journal of Control, 13(4), 356-365.
Jin, X., Wang, J., & Zeng, P. (2015). End-to-end delay analysis for mixed-criticality WirelessHART networks. IEEE/CAA Journal of Automatica Sinica, 2(3), 282-289.
Lakshmanan, S., Senthilkumar, T., & Balasubramaniam, P. (2011). Improved results on robust stability of neutral systems with mixed time-varying delays and nonlinear perturbations.Applied Mathematical Modelling,35(11), 5355-5368.
Li, X., & De Souza, C. E. (1997). Delay-dependent robust stability and stabilization of uncertain linear delay systems: a linear matrix inequality approach. IEEE Transactions on Automatic Control ,42(8), 1144-1148.
Liu, Y., & Li, M. (2014). An improved delay-dependent stability criterion of networked control systems.Journal of the Franklin Institute,351(3), 1540-1552.
López-Morales, V., & Valdés-Asiain, R. (2005). Robust control of a mimo thermal-hidraulic process with sensor compensation in real time. Journal of applied research and technology , 3(1), 27-36.
Malek-Zavareo, M., and Jamshidi, M. (1987). Time-delay systems: analysis optimization and applications. North-Holland.
Moon, Y. S., Park, P., Kwon, W. H., & Lee, Y. S. (2001). Delay-dependent robust stabilization of uncertain state-delayed systems.International Journal of control,74(14), 1447-1455.
Naranjo-Montoya, O. A. (2015). Stability analysis of a laser with two modulated saturable absorbers. Journal of applied research and technology ,13(6), 576-581.
Oladapo, B. I., Balogun, V. A., Adeoye, A. O., Olubunmi, I. E., & Afolabi, S. O. (2017). Experimental analysis of electro-pneumatic optimization of hot stamping machine control systems with on-delay timer. Journal of applied research and technology ,15(4), 356-364.
Park, P. (1999). A delay-dependent stability criterion for systems with uncertain time-invariant delays. IEEE Transactions on Automatic Control ,44(4), 876-877.
Park, P., Ko, J. W., & Jeong, C. (2011). Reciprocally convex approach to stability of systems with time-varying delays.Automatica,47(1), 235-238.
Parlakci, M.N.A, (2005). Improved robust stability and stabilizability criteria for time-delay systems with nonlinear perturbations. Proceeding 16th IFAC World Congress, Prague, 6-8.
Parlakçı, M. N. A. (2006). Robust stability of uncertain time-varying state-delayed systems.IEE Proceedings-Control Theory and Applications,153(4), 469-477.
Peng, C., & Tian, Y. C. (2008). Delay-dependent robust stability criteria for uncertain systems with interval time-varying delay. Journal of Computational and Applied Mathematics,214(2), 480-494.
Ramakrishnan, K., & Ray, G. (2012). Robust stability criterion for Markovian jump systems with nonlinear perturbations and mode-dependent time delays. . International Journal of General Systems, 41(4), 373-393.
Ramakrishnan, K., & Ray, G. (2015). Stability criteria for nonlinearly perturbed load frequency systems with time-delay. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 5(3), 383-392.
Ramakrishnan, K., & Ray, G. (2016). Stability criterion for networked control systems with additive time-varying state-delays and bounded nonlinearity. International Journal of Systems, Control and Communications, 7(1), 68-82.
Ramakrishnan, K., Venkatachalam, V., & Ray, G. (2015). Comments on ‘Improved delay-dependent stability criteria for continuous systems with two additive time-varying delay components’Communications in Nonlinear Science and Numerical Simulation, 24(1-3), 1-3.
Shao, H. (2008). Improved delay-dependent stability criteria for systems with a delay varying in a range. Automatica, 44(12), 3215-3218.
Shao, H. (2009). New delay-dependent stability criteria for systems with interval delay. Automatica, 45(3), 744-749.
Sharma, C., Gupta, S., & Kumar, V. (2011, July). Modeling and simulation of heat exchanger used in soda recovery. In Proc. World Congress on Engineering (WCE-2011), London, UK (Vol. 2), pp. 1406-1409.
Sun, J., Liu, G. P., Chen, J., & Rees, D. (2010). Improved delay-range-dependent stability criteria for linear systems with time-varying delays.Automatica,46(2), 466-470.
Veeraragavan, V., Duraisamy, P., Murugan, T., & Krishnan, R. (2017). Stability Analysis of Uncertain Temperature control system with two additive delays and nonlinear perturbation.Journal of Advances in Chemistry,13(10), 5927-5934.
Venkatachalam, V., & Prabhakaran, D. (2018). Stability Analysis of Network Controlled Temperature Control System with Additive Delays.CMES-Computer modeling in engineering and sciences,114(3), 321-334.
Venkatachalam, V., Prabhakaran, D., Thirumarimurugan, M., & Ramakrishnan, K. (2019). LMI based stability analysis of non-linearly perturbed DC motor speed control system with constant and time-varying delays.International Journal of Power Electronics,10(1-2), 1-17.
Wu, M., He, Y., & She, J. H. (2010). Stability analysis and robust control of time-delay systems Berlin: Springer, 22.1-336.
Yu, M., Wang, L., Chu, T., & Hao, F. (2004). An LMI approach to networked control systems with data packet dropout and transmission delays. In2004 43rd IEEE Conference on Decision and Control (CDC)(IEEE Cat. No. 04CH37601)(Vol. 4, pp. 3545-3550).
Zhang, C. K., He, Y., Jiang, L., Wu, Q. H., & Wu, M. (2014). Delay-dependent stability criteria for generalized neural networks with two delay components.IEEE Transactions on Neural Networks and Learning Systems,25(7), 1263-1276.
Glossary
: The set of real n vectors
: Belongs to
: Maximum time-delay
: Transport of matrix
: Magnitude of load disturbance
: Derivative of the time-delay
Notes
Author notes
*Corresponding author. E-mail address:vikranth6488@gmail.com (Venkatachalam Veeraragavan)