Artículo Científico
ESTIMACIÓN DE EMISIONES POR FALLOS EN MOTORES OTTO MEDIANTE REDES NEURONALES CONVOLUCIONALES
ESTIMATION OF EMISSIONS FROM FAILURES IN OTTO ENGINES USING CONVOLUTIONAL NEURONAL NETWORKS
ESTIMACIÓN DE EMISIONES POR FALLOS EN MOTORES OTTO MEDIANTE REDES NEURONALES CONVOLUCIONALES
Ingenius. Revista de Ciencia y Tecnología, núm. 35, pp. 97-109, 2026
Universidad Politécnica Salesiana

Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional.
Recepción: 24 Mayo 2025
Revisado: 05 Noviembre 2025
Aprobación: 20 Noviembre 2025
Publicación: 01 Enero 2026
Resumen: En este estudio se implementa una técnica de aprendizaje automático, concretamente redes neuronales convolucionales (CNN, por sus siglas en inglés), con el objetivo de predecir las emisiones contaminantes producidas por fallos en actuadores y componentes de motores Otto. Así pues, el problema de investigación abordado en este trabajo es la ausencia de métodos no intrusivos que, a partir de señales ya disponibles en el vehículo, permitan estimar con alta precisión las emisiones asociadas a fallas en sistemas de inyección, encendido y admisión de aire. Se cuantifican los niveles de CO (monóxido de carbono, %), CO2 (dióxido de carbono, %), HC (hidrocarburos no quemados en ppm) y O2 (oxígeno, %) a partir del análisis de la señal proveniente del sensor MAP (Manifold Absolute Pressure). Para ello, se adopta un protocolo riguroso de muestreo y procesamiento de la señal. La extracción de características óptimas del sensor MAP se basa en su relevancia informativa y capacidad de discriminación, determinadas mediante la transformación espectrográfica de la señal, lo que permite construir una base de datos robusta. Esta base sirve como entrada eficaz para el entrenamiento de la CNN, con la cual se logra un error de predicción inferior al 1 %.
Palabras clave: CNN, emisiones, estimación, motor Otto, redes neuronales convolucionales, machine learning.
Abstract: This study applies a machine learning technique, specifically Convolutional Neural Networks (CNNs), to predict pollutant emissions resulting from failures in actuators and components of Otto engines. The work addresses the current lack of non-intrusive methods that exploit signals already available in the vehicle to estimate, with high accuracy, emissions associated with failures in the injection, ignition, and air intake systems. Concentrations of CO (% carbon monoxide), CO2 (% carbon dioxide), HC (unburned hydrocarbons, ppm), and Ov (% oxygen) are quantified by analyzing the Manifold Absolute Pressure (MAP) sensor signal under a rigorous sampling and signal processing protocol. Optimal features are extracted from the MAP signal based on their informational relevance and discriminative capacity. These features are obtained through spectrographic transformation, enabling the construction of a robust database. The resulting dataset serves as an effective input for CNN training, achieving emission prediction errors below 1%.
Keywords: Convolutional neural networks (CNN), emissions, estimation, Otto engines, machine learning.
Forma sugerida de citar: APA
E. I. Arias-Montaño, R. S. León-Japa, P. García-Jaramillo y J. Maldonado-Ortega “Estimación de emisiones por fallos en motores Otto mediante redes neuronales convolucionales,” Ingenius, Revista de Ciencia y Tecnología, N.◦ 35, pp. 97-109, 2026. doi: https://doi.org/10.17163/ings.n35.2026.07
1. Introducción
Actualmente, las emisiones generadas por los motores de combustión interna alternativos (MCIA) constituyen una de las fuentes más significativas de contaminación atmosférica en zonas urbanas a escala global, afectando de manera adversa la calidad del aire y representando un desafío ambiental de creciente preocupación.
En contraste, la mezcla aire-combustible no siempre se quema de forma completa durante la fase de encendido en los motores de encendido provocado (MEP), debido a ineficiencias asociadas a cambios de temperatura, carga, variaciones en revoluciones por minuto (rpm) e incluso en la presión interna [1]. Por ello, al evaluar la eficiencia de la combustión, se requiere cuantificar los principales contaminantes emitidos: monóxido de carbono (CO), dióxido de carbono (CO2), hidrocarburos sin quemar (HC), óxidos de nitrógeno (NOx) y oxígeno (O2) [2, 3].
A partir de lo expuesto, se vuelve imprescindible adoptar metodologías avanzadas que integren herramientas de matemática computacional e inteligencia artificial [4,5]. Estas permiten una detección más precisa de fallos en los componentes y actuadores de los motores de combustión interna alternativos (MCIA), así como una caracterización más detallada de las emisiones de gases de escape [6].
Sapio et al. [7] desarrollaron un enfoque híbrido de modelado aplicado a los sistemas de reducción catalítica selectiva (SCR). Específicamente, emplearon redes neuronales recurrentes (RNN) y, a su vez, utilizaron redes neuronales tipo feedforward (FFNN) para predecir tanto la temperatura de salida del sistema catalítico (SC) como las concentraciones de contaminantes, en particular NOx y NH3 [8].
El uso de técnicas avanzadas de aprendizaje supervisado, como las redes neuronales artificiales (ANN), las redes convolucionales bidireccionale (CNNBiLSTM), las máquinas de vectores de soporte (SVM) y el algoritmo de refuerzo de gradiente extremo (XGBoost), ha demostrado ser una alternativa eficaz para mejorar la evaluación de olores en interiores de vehículos [9].
En este sentido, Cesur y Uysal [10] demostraron que el empleo de mezclas de combustibles de metanol y gasolina en motores de encendido provocado (MEP) incrementa en un 3,7 % la potencia efectiva, además de producir una disminución notable en los niveles de NOx y HC. Asimismo, el modelo desarrollado permitió predecir los parámetros de desempeño del motor y sus emisiones con niveles de precisión del 99 % y del 98 %, respectivamente.
Por otro lado, para estimar emisiones de CO2 en estudios, emplean distintos algoritmos, entre ellos regresión lineal, árboles de decisión y redes neuronales, lo que ha permitido confirmar la alta efectividad de los enfoques de aprendizaje automático para realizar predicciones precisas en el ámbito de las emisiones vehiculares [11].
En el trabajo de Li et al. [12] se desarrolló un modelo mejorado para la detección de fallas de encendido en motores a gasolina, basado en YOLOv8 y optimizado con módulos BiFormer y CBAM, con el fin de potenciar la extracción de características en señales acústicas. Las señales de motor se transforman mediante wavelets en imágenes tiempo-frecuencia para entrenar la red, alcanzando una precisión del 99.71 %, con lo cual supera al YOLOv8 original [13–15].
La presente investigación se orienta al análisis de la presión en el colector de admisión, utilizando para ello la señal registrada por el sensor MAP en motores de encendido provocado (MEP). Asimismo, se establece que el problema de investigación radica en la necesidad de un método rápido, de bajo costo y mínimamente invasivo para diagnosticar fallos en motores a gasolina y estimar sus emisiones de escape. En consecuencia, los enfoques actuales suelen emplear modelos físicos complejos o bancos de prueba, lo cual incrementa el costo y tiempo de medición [16].
Así pues, el problema se sintetiza en determinar cómo aprovechar la información contenida en un único sensor del MEP para estimar cuantitativamente múltiples emisiones de escape bajo diferentes condiciones de falla incipiente, utilizando técnicas de aprendizaje profundo [17, 18]. Por esta razón, esta metodología constituye un avance relevante tanto en la predicción de emisiones de gases de escape como en la detección de fallos en motores MEP.
El artículo se estructura de la siguiente manera: la Sección 2 describe la configuración experimental, el procedimiento de adquisición de datos, la construcción de los espectrogramas y el diseño de la CNN. La Sección 3 presenta los resultados de la predicción de emisiones y el análisis estadístico comparativo. Finalmente, la Sección 4 expone las conclusiones principales y las líneas de trabajo futuro.
2. Métodos y materiales
En la sección siguiente se expone la propuesta avanzada de diagnóstico, acompañada de la configuración experimental implementada y de la instrumentación utilizada, caracterizada por su naturaleza mínimamente invasiva. Asimismo, se describen en detalle las condiciones bajo las cuales se llevó a cabo el muestreo, la metodología empleada para la adquisición de datos, el tratamiento de la señal proveniente del sensor MAP, el procedimiento de selección de los espectrogramas empleados en el entrenamiento de la red neuronal convolucional (CNN), así como el desarrollo del algoritmo diseñado para la predicción de emisiones y la detección de fallos en el sistema.
2.1. Configuración experimental e instrumentación
La propuesta presentada tiene como finalidad principal evitar el desmontaje de componentes y sistemas del vehículo, posibilitando la detección de fallos y la predicción de emisiones de gases de escape mediante un enfoque mínimamente invasivo. Para alcanzar este objetivo, se lleva a cabo la adquisición de muestras de la depresión generada en el motor de encendido provocado (MEP), utilizando como fuente de información la señal de voltaje emitida por el sensor de presión absoluta del colector (MAP).
En la Tabla 1 se muestran las características técnicas del motor MEP empleado en el estudio; por otro lado, la Tabla 2 presenta la instrumentación utilizada durante el proceso experimental.
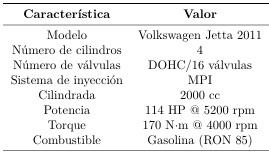
Tabla 1.
Características del MEP
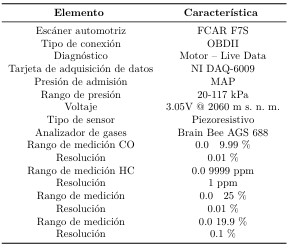
Tabla 2.
Instrumentación del estudio
La Figura 1 ilustra los componentes fundamentales empleados en el presente estudio, los cuales incluyen el sensor de presión absoluta del colector (MAP), la tarjeta de adquisición de datos DAQ-6009 y una computadora portátil utilizada como unidad de procesamiento. Por su parte, la Figura 2 muestra el esquema de conexión establecido entre la tarjeta DAQ-6009, el sensor MAP y la unidad experimental seleccionada para la prueba, correspondiente a un vehículo Volkswagen Jetta, modelo 2011.
El sensor MAP es un componente original del vehículo, presente en la mayoría de los motores Otto modernos, lo que hace que la propuesta sea económica y fácilmente replicable sin necesidad de añadir hardware externo.
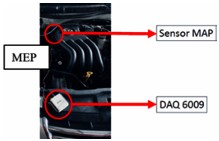
Figura 1.
Instrumentación utilizada en MEP

Figura 2.
Conexión para sensor MAP
2.2. Condiciones para la toma de muestras
El sensor MAP instalado en la unidad experimental fue utilizado para capturar la señal de voltaje, debido a su ubicación estratégica en el colector de admisión del motor de encendido provocado (MEP). Paralelamente, se recolectaron muestras correspondientes a las emisiones de gases de escape, que incluyeron monóxido de carbono (CO) y dióxido de carbono (CO2), ambos expresados en porcentaje; hidrocarburos no quemados (HC) expresados en partes por millón (ppm); y oxígeno (O2), también expresado en porcentaje. Esta información fue obtenida mediante el uso de un analizador de gases, mientras que la señal del sensor MAP fue adquirida a través de la tarjeta DAQ-6009 en conjunto con el software LabVIEW 2024, lo que permitió realizar un monitoreo en tiempo real.
Durante la recolección de datos, tanto la señal del sensor MAP como las emisiones de gases se registraron a un régimen constante de 2500 rpm bajo condiciones de prueba estática en la unidad experimental. La temperatura operativa del motor MEP se mantuvo en un intervalo de 90 a 98° y se utilizó un escáner automotriz para verificar y supervisar en tiempo real los parámetros fundamentales del motor.
De acuerdo con el estudio preexperimental realizado por Contreras et al. [19], la señal emitida por el sensor MAP presenta picos de alta frecuencia. En consecuencia, los autores recomiendan efectuar la adquisición de datos a una velocidad de 10 kHz durante un intervalo de 5 s, con el fin de cumplir adecuadamente el criterio de Nyquist.
La presión absoluta en el colector de admisión está directamente relacionada con la carga del motor, la eficiencia volumétrica y la dinámica de la combustión; por lo tanto, sus variaciones contienen información sobre fallos en los sistemas de admisión, inyección y encendido. Estudios previos del propio grupo de investigación han demostrado que la señal MAP, tratada adecuadamente, permite distinguir condiciones de operación y ciertos tipos de falla con buena sensibilidad [2], [19]. Al trabajar únicamente con la señal del sensor MAP se logra un enfoque mínimamente invasivo: no se manipulan los conductos de escape, no se añaden sensores intrusivos y se reduce la complejidad del sistema.
En función de esta recomendación, la configuración empleada para la tarjeta DAQ-6009 consideró una tasa de muestreo de 5 kHz en el parámetro samples to read, una frecuencia de adquisición de 10 kHz y una duración de 5 s por cada tratamiento experimental, bajo una conexión en modo diferencial. La planificación del orden de recolección de datos fue estructurada en el software Minitab mediante la aplicación de un diseño d experimentos (DOE). Como resultado, se establecieron ocho tratamientos base y, con el fin de incrementar la robustez estadística y la representatividad de los datos, se ejecutaron diez réplicas por cada tratamiento considerado [1].
2.3. Procedimiento para la recolección de datos
La Figura 3 presenta los componentes físicos esenciales utilizados para llevar a cabo el diagnóstico de fallos en componentes y actuadores, así como la correspondiente predicción de emisiones de gases de escape. Estos elementos incluyen un escáner automotriz, la tarjeta de adquisición de datos DAQ-6009, un analizador de gases Brain Bee y una computadora portátil.
Para realizar la adquisición de datos relacionados con la señal emitida por el sensor MAP, se sigue el procedimiento sistematizado que se muestra en el flujograma de la Figura 4.
La metodología de recolección de muestras inicia con la verificación del estado operativo de la unidad experimental, ya sea en condiciones normales o con fallas inducidas bajo supervisión. Posteriormente, se inspecciona la conexión entre la tarjeta NI DAQ-6009 y el sensor MAP del motor MEP. Si la conexión es correcta, se registra la señal en LabVIEW y la información se almacena en un archivo de Excel; en caso contrario, se realiza una revisión de la conexión [1].
Este procedimiento se aplica de manera idéntica tanto para el motor MEP en estado operativo óptimo como para aquel que presenta fallas bajo control, como se muestra en las Figuras 4(a) y 4(b) [1], [14]. La adquisición de muestras se repite diez veces para cada una de las condiciones definidas en la unidad experimental.
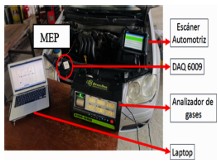
Figura 3.
Instrumentos usados para tomar las muestras
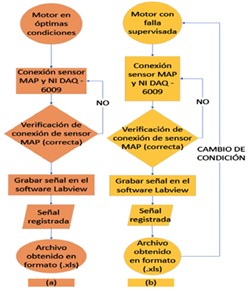
Figura 4.
Diagrama de flujo para el proceso de toma de muestras: (a) motor con óptimas condiciones, (b) motor con falla inducida
En la Figura 5 se describen las ocho condiciones de operación establecidas para el motor en estudio, cada una acompañada de su correspondiente nivel, incluida la condición de funcionamiento óptimo del motor.
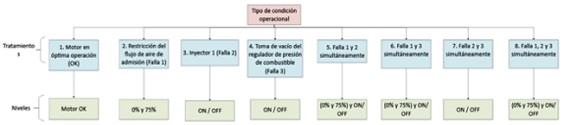
Figura 5.
Estados funcionales en la unidad de prueba MEP
2.4. Extracción de segmentos de señal del MAP y elección de espectros para entrenar la red CNN
Los espectrogramas constituyen una representación visual que permite observar la variación del contenido espectral de una señal en función del tiempo, siendo especialmente eficaces para el análisis de señales no estacionarias. Por esta razón, en el presente estudio se emplean espectrogramas con el fin de caracterizar el comportamiento dinámico de la señal proveniente del sensor MAP.
Para seleccionar los espectrogramas más adecuados para el entrenamiento de la red neuronal convolucional (CNN), inicialmente se desarrolló un script que permite segmentar cada tratamiento experimental —compuesto por diez réplicas—, dividiendo la señal del sensor MAP en 250 fragmentos. Adicionalmente, se implementó un algoritmo en el entorno Matlab para la generación automatizada de espectrogramas, obteniéndose un total de 200 espectrogramas distintos por tratamiento. La configuración utilizada incluyó una frecuencia de muestreo de 10 kHz, un tamaño de ventana de 512 muestras para el análisis espectral y una superposición de 128 muestras entre ventanas sucesivas.
Para determinar los espectrogramas más adecuados como entrada para la red neuronal convolucional (CNN), se llevó a cabo un análisis detallado de los 200 espectrogramas generados por cada tratamiento, tal como se muestra en la Figura 6. La zona de menor actividad energética observada aproximadamente entre 3,5 y 4,5 s puede indicar una condición transitoria, es decir, un evento asociado a una perturbación en la señal MAP, como podría ocurrir ante la presencia de un fallo en el MEP.
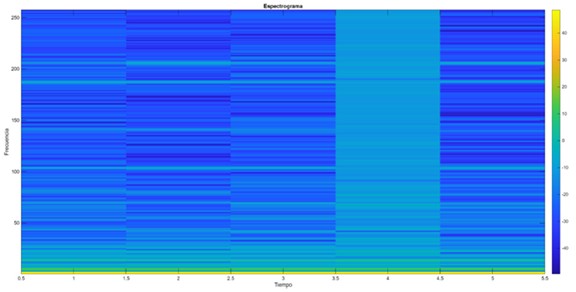
Figura 6.
Muestra de un espectrograma de los 200 generados
A partir de este proceso, se identificó el patrón espectral con mayor consistencia y representatividad. Con base en ello, se seleccionaron 50 espectrogramas por tratamiento que reproducían con mayor fidelidad dicho patrón característico. Los 50 espectrogramas con menor distancia media respecto al espectro promedio fueron seleccionados como los más representativos mediante Matlab. La elección de estos 50 espectrogramas se sustenta en su capacidad para reproducir de manera consistente el patrón espectro-temporal característico del sensor MAP bajo cada condición operacional.
En la Figura 7 se presenta el espectrograma representativo correspondiente a una muestra del motor en condición OK. En el eje horizontal se representa el dominio temporal en segundos, mientras que el eje vertical muestra la distribución de energía espectral en función de la frecuencia (0–250 Hz), lo cual abarca el rango dominante de variación del pulso de admisión en motores de ciclo Otto.
El mapa colorimétrico de la Figura 7, expresado en escala dB, refleja la concentración de potencia espectral en cada región tiempo–frecuencia. Se observa un contenido energético predominante en frecuencias bajas (por debajo de 40 Hz), asociado a la dinámica del vacío del múltiple y a la interacción entre el movimiento de los pistones y el sistema de admisión. La presencia de variaciones periódicas distribuidas a lo largo del tiempo indica la consistencia cíclica de la señal MAP bajo condiciones de operación estable. Las variacione puntuales en las bandas intermedias (aprox. 80-180 Hz) se relacionan con fluctuaciones en el llenado volumétrico.
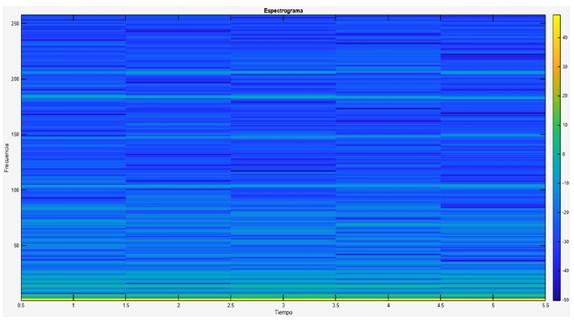
Figura 7.
Espectrograma de motor OK representativo
2.5. Modelo de la red neuronal convolucional CNN
Con el apoyo del entorno de desarrollo Visual Studio Code y utilizando el lenguaje de programación Python, se desarrolló un algoritmo basado en una red neuronal convolucional (CNN). Esta arquitectura forma parte del campo del Deep Learning, una rama del aprendizaje automático (Machine Learning) que se distingue por su capacidad para aprender de manera autónoma a partir de grandes conjuntos de datos. Su principal fortalez aradica en la detección de patrones complejos en imágenes, lo que la hace especialmente útil para tareas de clasificación y reconocimiento.
El uso de una CNN se justifica plenamente debido a la naturaleza espectral y bidimensional de los datos obtenidos a partir del sensor MAP. Al transformar la señal temporal en espectrogramas, la información relevante del motor queda distribuida en patrones de energía dependientes del tiempo y la frecuencia, los cuales presentan estructuras complejas que no pueden ser captadas adecuadamente mediante modelos tradicionales, como SVM, árboles de decisión o redes neuronales densas.
Las CNN, gracias a su arquitectura basada en filtros convolucionales, permiten extraer automáticamente características espaciales jerárquicas desde los espectrogramas, identificando variaciones sutiles asociadas a la dinámica de presión, irregularidades de combustión y efectos derivados de fallos en admisión, inyección o encendido. Dado que la entrada natural del modelo son imágenes, las CNN constituyen la opción estándar para procesar datos de este tipo. A diferencia de una ANN de tipo feed-forward o de modelos basados en SVM o Random Forest, la CNN aprende automáticamente mediante filtros convolucionales que capturan patrones de alta frecuencia, zonas de energía concentrada y estructuras temporales a distintos modos de fallo.
La Figura 8 presenta la arquitectura de una CNN, en la cual las imágenes se procesan mediante filtros aplicados en sucesivas capas convolucionales. Cada capa extrae características progresivamente más complejas, permitiendo construir una representación jerárquica de la información relevante y facilitando la interpretación del contenido visual.
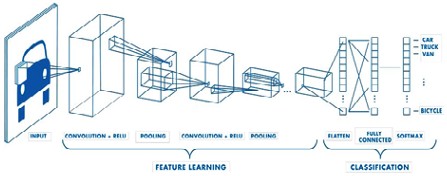
Figura 8.
Arquitectura de red neuronal CNN [20]
La arquitectura CNN propuesta, compuesta por tres capas convolucionales, capas de pooling y capas densas, logra aprender patrones complejos sin incurrir en sobreajuste y con tiempos de entrenamiento adecuados. Sus resultados muestran un MSE inferior al 1 %, superando el desempeño de modelos ANN tradicionales que operan señales MAP menos procesadas.
En la Figura 9 se presenta el diagrama de flujo que describe el proceso de entrenamiento de la red neuronal convolucional (CNN), diseñada específicamente para predecir las emisiones de gases de escape y detectar posibles fallos en la unidad experimental evaluada.
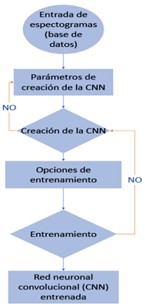
Figura 9.
Diagrama de flujo del proceso de entrenamiento de la CNN
El algoritmo inicia con la lectura de la base de datos compuesta por los espectrogramas, tras lo cual se normalizan las imágenes dividiendo sus valores entre 255, permitiendo escalarlas al rango numérico de 0 a 1. Luego, el conjunto de datos se divide en dos partes: el 70 % se destina al entrenamiento del modelo y el 30 % restante se reserva para la fase de prueba.
Una vez realizados estos pasos, se configuran los parámetros iniciales de la red neuronal convolucional (CNN), incluido el tamaño de la capa de entrada, definido como (224, 224, 3), que corresponde a las dimensiones de las imágenes utilizadas. En las siguientes etapas, se construye la arquitectura de la CNN, compuesta por tres capas convolucionales, cada una acompañada por su respectiva capa de normalización y capas de reducción dimensional mediante MaxPooling2D.
Además, la red incorpora capas completamente conectadas (fully connected) y una capa final de regresión, encargada de estimar los valores de los gases de escape, tal como se presenta en la Tabla 3.
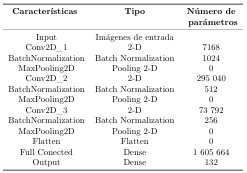
Tabla 3.
Características de la CNN
La Figura 10 muestra el esquema de la red neuronal convolucional desarrollada para la predicción de emisiones contaminantes en motores Otto, a partir de espectrogramas obtenidos del sensor MAP. La arquitectura inicia con una capa de entrada que recibe imágenes de tamaño 224×224×3 píxeles, seguida de tres bloques secuenciales Conv2D + Batch Normalization + MaxPooling2D, encargados de extraer y reducir la dimensionalidad de las características espacio-frecuencia presentes en los espectrogramas.
Posteriormente, la red incluye una capa de aplanamiento (flatten), que convierte los mapas de características en un vector unidimensional, el cual es procesado por una capa densa (fully connected), para finalmente generar las predicciones mediante una capa de salida con función de regresión multivariable. Esta configuración asegura una extracción jerárquica eficiente de patrones relevantes para la estimación precisa de las emisiones de CO, CO2, HC y O2.

Figura 10.
Estructura de la CNN propuesta
Para el proceso de entrenamiento se utilizó el optimizador Adam, estableciendo un total de 50 épocas y un tamaño de lote de 16 muestras.
Al finalizar esta etapa, se evaluó el desempeño del modelo mediante el cálculo del error cuadrático medio (MSE). Esta evaluación se complementó con representaciones gráficas, entre ellas un gráfico d dispersión, un histograma de errores y una gráfica de comparación punto a punto, lo que permitió analizar con mayor detalle la precisión del modelo.
Posteriormente, se estimó el error de predicción para cada una de las salidas correspondientes a las emisiones de CO, HC, CO2 y O2. En los casos en los que el error superó el umbral del 5 %, se realizaron ajustes en los parámetros del modelo con el objetivo de mejorar su precisión.
La Figura 11 muestra los resultados obtenidos mediante la métrica de error absoluto medio (MAE), utilizada para evaluar el rendimiento del modelo de regresión. Esta métrica permite cuantificar la diferencia entre los valores predichos por la CNN y los valores reales. Como resultado del entrenamiento —desarrollado a lo largo de 50 épocas y un máximo de 900 iteraciones, se obtuvieron valores de MSE de 0.1294 % para CO, 0.0200 % para HC, 0.0320 % para CO2 y 0.0100 % para O2.
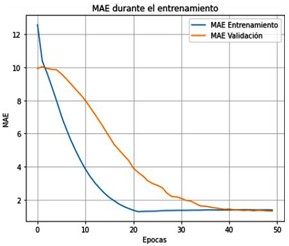
Figura 11.
Error absoluto medio (MAE)
En la Figura 12 se observa la variación de la pérdida durante el entrenamiento de la red neuronal convolucional (CNN). Como es habitual en este tipo de redes, el valor de pérdida inicia en un nivel alto, pero disminuye con rapidez conforme el modelo se ajusta a los datos. Este descenso progresivo indica que la red está aprendiendo correctamente y adaptando sus parámetros de manera eficiente a lo largo del proceso de entrenamiento.
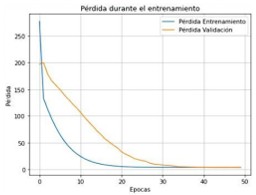
Figura 12.
Curva de error durante el entrenamiento
3. Resultados y discusión
Para evaluar el rendimiento del modelo en la predicción de emisiones vinculadas a fallos en componentes y actuadores, se realizaron diversos ensayos aplicando distintos métodos de análisis. La Figura 13 ilustra un conjunto de 160 registros correspondientes a la etapa de prueba. En esta gráfica, los círculos azules representan los valores estimados por la red neuronal convolucional (CNN), mientras que las cruces rojas indican los valores reales. Como puede observarse, las predicciones del modelo presentan una alta precisión, con errores que no superan el 1 % en ningún caso. Además, se calcularon las métricas MAE (error absoluto medio) y MSE (error cuadrático medio), cuyos resultados confirman la fiabilidad y el adecuado ajuste del modelo propuesto.
En la Figura 14 se comparan los valores reales con las predicciones obtenidas por la red neuronal convolucional (CNN) para las concentraciones de CO, CO2, HC y O2. Los puntos azules, que representan los valores estimados por el modelo, se ubican muy cerca de la línea de referencia, lo que indica una estimación precisa de las emisiones en diferentes condiciones de funcionamiento. Además, se observa que las ocho condiciones del motor de encendido provocado (MEP) fueron correctamente identificadas por la red, lo que respalda la solidez del modelo propuesto.
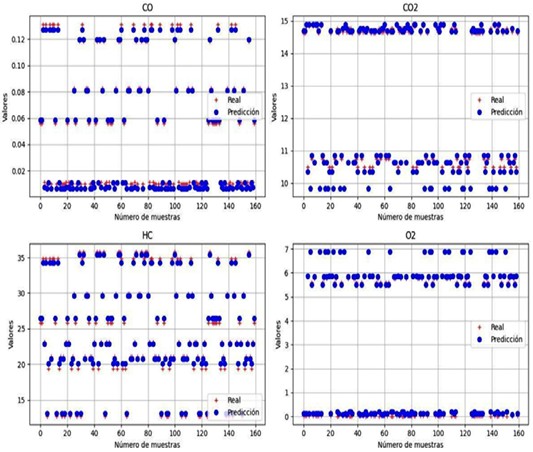
Figura 13.
Resultado de la CNN en la estimación de gases de escape: CO, CO2, HC, O2
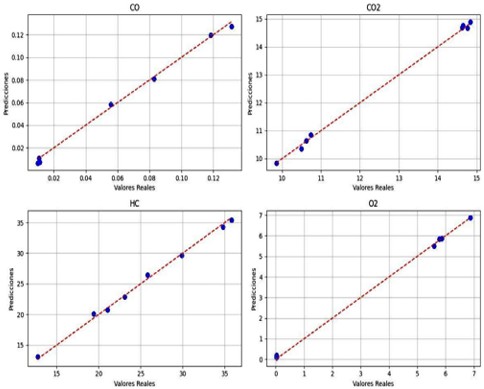
Figura 14.
Resultado de CNN con emisión 1 (monóxido de carbono), emisión 2 (dióxido de carbono), emisión 3 (hidrocarburos no combustionados) y emisión 4 (oxígeno)
En la Tabla 4 se presentan diversas aplicaciones del área automotriz que emplean distintas técnicas para la predicción de emisiones, junto con factores relevantes asociados a cada enfoque.
Los resultados obtenidos confirman que la metodología aplicada es efectiva tanto para diagnosticar fallos como para predecir emisiones contaminantes. La coincidencia entre los valores reales y los estimados por el modelo indica que este logra identificar con precisión el estado operativo del motor y calcular las concentraciones de gases de escape con un margen de error muy reducido.
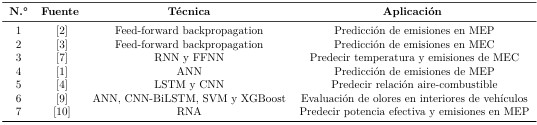
Tabla 4.
Estudios relacionados de predicción de emisiones en el área automotriz
En el estudio [2] se obtuvieron redes neuronales para la predicción de CO y HC, con errores de 5.40e-9 y 9.75e 5, respectivamente. De igual manera, el estudio presentado en [1] reporta errores de predicción igualmente bajos, mostrando un excelente nivel de ajuste, con un coeficiente de determinación (R2) del 99.2 % y valores reducidos de error cuadrático medio (RMSE y MSE) para la emisión de CO2. Por otra parte, l aplicación de redes neuronales artificiales permite alcanzar predicciones precisas de parámetros de desempeño del motor y de emisiones como NOx y HC, tal como demuestra [10], donde se alcanzaron niveles de precisión del 99 % y del 98 %, respectivamente.
Por lo tanto, los resultados obtenidos indican que la metodología propuesta —basada en espectrogramas de la señal MAP y una red neuronal convolucional (CNN)— alcanza una precisión notable en la estimación simultánea de emisiones contaminantes (CO, CO2, HC y O2), con errores inferiores al 1 %. Estos valores superan ampliamente los reportes de trabajos previos que emplean técnicas tradicionales como redes neuronales densas (ANN), máquinas de soporte vectorial (SVM) o métodos basados en regresiones multivariantes, tal como se evidencia en la Tabla 4.
En relación con esto, la Figura 15 presenta un análisis estadístico de los datos agrupados, comparando la condición real de la unidad experimental con las predicciones realizadas por la red neuronal convolucional (CNN) para las concentraciones de hidrocarburos no quemados (HC). Para esta comparación se empleó el test de Tukey, con un nivel de confianza del 95 %.
Los resultados indican que no existen diferencias estadísticamente significativas entre las mediciones reales y las generadas por el modelo. Esto sugiere que las medias de ambos conjuntos son equivalentes y que las variaciones observadas se mantienen dentro de un rango muy próximo a cero.
La Figura 16 muestra la gráfica de intervalos que compara la condición real con las estimaciones realizadas por la red neuronal convolucional (CNN) en relación con las concentraciones de hidrocarburos no quemados (HC). Al observar los resultados, se aprecia que no existen diferencias significativas entre los promedios registrados bajo las distintas condiciones operativas del motor de encendido provocado (MEP). Esto refuerza la confiabilidad del modelo en diversos escenarios de funcionamiento.
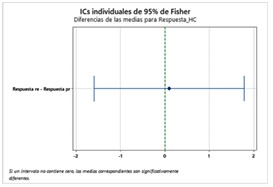
Figura 15.
Gráfico comparativo de medias entre datos reales y CNN de HC
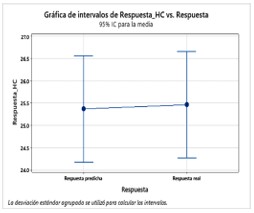
Figura 16.
Gráfica de intervalos de datos reales vs. CNN de HC
De manera similar, la Figura 17 analiza la relación entre los valores estimados por la red neuronal convolucional (CNN) y los valores reales, aplicando el test estadístico de Tukey para evaluar posibles diferencias. Los resultados indican que ambos conjuntos comparten la misma letra de agrupación (A), lo que sugiere que no existen diferencias estadísticamente significativas entre ellos.
Además, el análisis de varianza (ANOVA) arrojó un valor p de 0,911, lo que, con un nivel de confianza del 91,1 %, respalda la consistencia y precisión del modelo desarrollado.
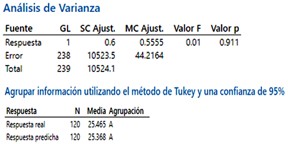
Figura 17.
Resultados ANOVA y método de Tukey
3.1. Limitaciones
Este estudio se desarrolló sobre un motor Otto con una configuración de sistema de inyección moderno, dentro de un rango específico de puntos de operación y tipos de fallo inducidos. Esta elección responde a la necesidad de trabajar en un entorno controlado que permita aislar el efecto de los fallos sobre las emisiones y entrenar la CNN con datos consistentes y repetibles. En este sentido, los resultados obtenidos son representativos y sólidos para el motor y las condiciones consideradas, y muestran el potencial de la metodología propuesta para relacionar fallos en componentes y actuadores con variaciones en las emisiones.
4. Conclusiones
Esta investigación destaca por integrar sistemas de adquisición de datos con algoritmos de inteligencia artificial para el diagnóstico temprano de fallos en motores de encendido provocado (MEP). Se abordaron anomalías en la toma de vacío del regulador de presión de combustible y en el filtro de aire. El método permite detectar fallos sin desmontar componentes, ofreciendo un diagnóstico mínimamente invasivo.
Los ensayos experimentales confirmaron que el modelo, basado en una red neuronal convolucional compuesta por tres capas convolucionales, capas de normalización y MaxPooling2D, es capaz de predecir las emisiones con alta precisión. Se obtuvieron errores cuadráticos medios (MSE) bajos, con valores de 0.1294 % para CO, 0.0200 % para HC, 0.0320 % para CO2 y 0.0100 % para O2, utilizando 50 épocas de entrenamiento
y hasta 900 iteraciones.
Además, se aplicó un análisis de varianza de un solo factor mediante el software Minitab, cuyo resultado arrojó un valor p de 0.911. Este resultado indica que no existen diferencias estadísticamente significativas entre los valores reales y los estimados por la red, lo cual respalda la confiabilidad del modelo.
En conjunto, estos hallazgos refuerzan el potencial de las redes neuronales convolucionales como una solución eficaz y no invasiva para la detección de fallos y la predicción de emisiones en motores de encendido provocado, destacando su bajo margen de error y su aplicabilidad práctica en sistemas de combustión interna.
Si bien las métricas empleadas (MSE y MAE) son suficientes para evidenciar la precisión del modelo convolucional, se reconoce que otros indicadores pueden aportar valor en análisis comparativos o de sensibilidad. Por ello, se considera incorporar en trabajos futuros métricas adicionales como RMSE, R2 y MAPE.
Rol de autores
Elmer I. Arias-Montaño: conceptualización, curación de datos, análisis formal, investigación, metodología, administración de proyecto, recursos, software, supervisión, validación, visualización, escritura borrador original, escritura – revisión y edición.
Rogelio S. León-Japa: conceptualización, análisis formal, investigación, metodología, administración de proyecto, recursos, software, supervisión, validación, visualización, escritura – revisión y edición.
Pedro García-Jaramillo: curación de datos, software, validación.
José Maldonado-Ortega: curación de datos, software, validación.
Referencias
[1] W. R. Contreras Urgiles, R. S. León Japa, and J. L. Maldonado Ortega, “Predicción de emisiones de co y hc en motores otto mediante redes neuronales,” Ingenius, no. 23, pp. 30–39, Dec. 2019. [Online]. Available: https://doi.org/10.17163/ings.n23.2020.03
[2] F. Narváez, F. E. Sierra Vargas, and M. A. Montenegro Mier, “Modelo basado en redes neuronales para predecir las emisiones en un motor diésel que opera con mezclas de biodiésel de higuerilla,” Informador Técnico, vol. 76, p. 46, Dec. 2012. [Online]. Available: https://doi.org/10.23850/22565035.28
[3] R. S. Chauhan and N. Shrivastava, “Neuro fuzzy-grey wolf optimization-based modelling and analysis of diesel engine using tire oil with different proportions of 2-ehn,” Fuel, vol. 384, p. 133849, Mar. 2025. [Online]. Available: https://doi.org/10.1016/j.fuel.2024.133849
[4] F. Sapio, F. Aglietti, P. Ferreri, and A. Savuca, “Neural-network-based modeling of scr systems for emission simulation: A comprehensive approach,” SAE International Journal of Advances and Current Practices in Mobility, vol. 07, no. 3, pp. 1437–1452, Sep. 2024. [Online]. Available: https://doi.org/10.4271/2024-24-0042
[5] H. H. Imtiaz, P. Schaffer, Y. Liu, P. Hesse, A. Bergmann, and M. Kupper, “Qualitative and quantitative analyses of automotive exhaust plumes for remote emission sensing application using gas schlieren imaging sensor system,” Atmosphere, vol. 15, no. 9, p. 1023, Aug. 2024. [Online]. Available: https://doi.org/10.3390/atmos15091023
[6] W. Torres Guin, J. Sánchez Aquino, S. Bustos Gaibor, and M. Coronel Suarez, “Arquitectura de iot para el monitoreo de emisiones de gases contaminantes de vehículos y su validación a través de machine learning,” Ingenius, no. 32, pp. 9–17, Oct. 2024. [Online]. Available: https://doi.org/10.17163/ings.n32.2024.01
[7] R. S. Jawad and H. Abid, “Hvdc fault detection and classification with artificial neural network based on aco-dwt method,” Energies, vol. 16, no. 3, p. 1064, Jan. 2023. [Online]. Available: https://doi.org/10.3390/en16031064
[8] F. Ricci, M. Avana, and F. Mariani, “Enhancing lambda measurement in hydrogen-fueled si engines through virtual sensor implementation,” Energies, vol. 17, no. 16, p. 3932, Aug. 2024. [Online]. Available: https://doi.org/10.3390/en17163932
[9] D. Tian, Q. Li, F. Liu, J. Khan, M. Q. Abbas, and Z. Du, “Voc data-driven evaluation of vehicle cabin odor: from ann to cnn-bilstm,” Environmental Science and Pollution Research, vol. 31, no. 22, pp. 32 826–32 841, Apr. 2024. [Online]. Available: https://doi.org/10.1007/s11356-024-33293-y
[10] I. Cesur and F. Uysal, “Experimental investigation and artificial neural network-based modelling of thermal barrier engine performance and exhaust emissions for methanol-gasoline blends,” Energy, vol. 291, p. 130393, Mar. 2024. [Online]. Available: https://doi.org/10.1016/j.energy.2024.130393
[11] A. K and P. Rithishbrahma, “Prediction of vehicle carbon emission using machine learning,” in 2024 5th International Conference on Electronics and Sustainable Communication Systems (ICESC). IEEE, Aug. 2024, pp. 1814–1818. [Online]. Available: https://doi.org/10.1109/ICESC60852.2024.10690134
[12] M. A. Rahim, M. M. Rahman, M. S. Islam, A. J. M. Muzahid, M. A. Rahman, and D. Ramasamy, “Deep learning-based vehicular engine health monitoring system utilising a hybrid convolutional neural network/bidirectional gated recurrent unit,” Expert Systems with Applications, vol. 257, p. 125080, Dec. 2024. [Online]. Available: https://doi.org/10.1016/j.eswa.2024.125080
[13] H. Sun and P. Chen, “Application of neural networks in automotive engine misfire,” in 2024 IEEE 4th International Conference on Electronic Communications, Internet of Things and Big Data (ICEIB). IEEE, Apr. 2024, pp. 261–264. [Online]. Available: https://doi.org/10.1109/ICEIB61477.2024.10602668
[14] M. Abboush, D. Bamal, C. Knieke, and A. Rausch, “Intelligent fault detection and classification based on hybrid deep learning methods for hardware-in-the-loop test of automotive software systems,” Sensors, vol. 22, no. 11, p. 4066, May 2022. [Online]. Available: https://doi.org/10.3390/s22114066
[15] S.-C. Lin, S.-F. Su, and Y. Huang, “A time-frequency signal-based convolutional neural network algorithm for fault diagnosis of gasoline engine fuel control system,” in 2019 International Conference on System Science and Engineering (ICSSE). IEEE, Jul. 2019, pp. 81–87. [Online]. Available: https://doi.org/10.1109/ICSSE.2019.8823285
[16] A. Maged and M. Nour, “Prediction of combustion pressure with deep learning using flame images,” Fuel, vol. 380, p. 133203, Jan. 2025. [Online]. Available: https://doi.org/10.1016/j.fuel.2024.133203
[17] Z. Li, Z. Qin, W. Luo, and X. Ling, “Gasoline engine misfire fault diagnosis method based on improved yolov8,” Electronics, vol. 13, no. 14, p. 2688, Jul. 2024. [Online]. Available: https://doi.org/10.3390/electronics13142688
[18] Y. Liu, J. Kang, L. Wen, Y. Bai, and C. Guo, “Health status assessment of diesel engine valve clearance based on bfa-boavmd adaptive noise reduction and multichannel information fusion,” Sensors, vol. 22, no. 21, p. 8129, Oct. 2022. [Online]. Available: https://doi.org/10.3390/s22218129
[19] W. R. Contreras Urgiles, J. Maldonado Ortega, and R. León Japa, “Aplicación de una red neuronal feed-forward backpropagation para el diagnóstico de fallas mecánicas en motores de encendido provocado,” Ingenius, no. 21, pp. 32–40, Dec. 2018. [Online]. Available: https://doi.org/10.17163/ings.n21.2019.03
[20] MathWorks. (2025) Redes neuronale convolucionales. The MathWorks, Inc. [Online]. Available: https://upsalesiana.ec/ing35ar7r20
Información adicional
redalyc-journal-id: 5055
Enlace alternativo
https://ingenius.ups.edu.ec/ingenius/article/view/10648 (html)