Artículos
Recepción: 20 Marzo 2021
Aprobación: 13 Septiembre 2021
DOI: https://doi.org/10.18273/revuin.v21n1-2022006
Resumen: En Medellín, la vía que atraviesa el parque de Robledo ha jugado un papel importante como ruta de acceso a diferentes barrios del occidente y a municipios de la subregión occidental antioqueña. Diariamente, cientos de vehículos transitan por allí, por lo que esta se identifica como la única vía de acceso, situación por la que en ciertas horas del día se torna lenta. A pesar de que se buscan vías alternas, no se encuentran resultados satisfactorios, ya que la única posibilidad está igual o más congestionada que la primera. En este documento se propone realizar un análisis de la problemática de congestión vial presentada en la vía del parque de Robledo en el sentido oriente-occidente, mediante simulación basada en agentes. Para la realización del modelo de simulación, se caracterizan los individuos por medio de rasgos relevantes, y a su vez se desarrolla una evaluación del comportamiento por mejorar en capacidad vial por ampliación, y la validación respectiva de los resultados obtenidos por medio de esta alternativa. Como resultado se observa que la adecuación de la vía mediante su ampliación facilita y mejora las condiciones de movilidad, aumentando hasta en un 20 % la velocidad de desplazamiento y optimizándose la capacidad vehicular del trayecto hasta el doble en horas pico.
Palabras clave: flujo vehicular, congestión urbana, simulación basada en agentes, dinámica vehicular.
Abstract:
In the municipality of Medellín, the road that crosses Robledo Park has played an important role as an access route to different neighborhoods in the west, and the Antioquia western subregions. Every day, hundreds of vehicles pass through, identifying it as the only access road; a situation that at certain times of the day becomes slow. Although alternative routes are sought, satisfactory results have not been found since the only possibility is equal or more congested than the first. In this document, the proposal was to carry out an analysis of the problem of road congestion presented on the road in the east-west direction, through agent-based simulation. For the simulation model, the individuals were characterized by relevant traits, and, in turn, an evaluation of the behavior was developed for the improvement in road capacity by enlargement, and the respective validation of the results obtained through this alternative.
As a result, it was observed that the adaptation of the road through its extension facilitates and improves the mobility conditions, increasing its travel speed by up to 20% and optimizing the vehicular capacity of the route to double at peak times.
Keywords: traffic flow, urban congestion, agent-based simulation, vehicle dynamics.
1. Introducción
La congestión vehicular es un problema que ha sido ampliamente estudiado, por razones asociadas a la calidad de vida de las personas que habitan en zonas aledañas [1], [2], [3]. Diferentes estudios concluyen la necesidad del espacio público para los peatones y la posibilidad para los conductores del uso de inteligencia artificial para el control de espacios, tiempos, parqueo y demás necesidades asociadas con la movilidad y ubicación de los automotores [4]. Técnicas como simulación basada en agentes son empleadas para evaluar esas políticas asociadas a la conducción autónoma, el empleo de herramientas de IoT (Internet of Things) y la automatización de la conducción [5], [6], [7].
En el caso de Colombia, como en muchos otros países, los tiempos de desplazamiento en las ciudades capitales son altos [6]. En cada ciudad existen diferentes problemáticas, basadas tradicionalmente en sus características topográficas. En Medellín, las condiciones son difíciles, por la topografía escarpada, las pocas vías de acceso a la zona urbana y la cultura ciudadana [8].
Los barrios de la ciudad poseen diversas características, pero en casos de barrios donde existen vías de acceso la situación es compleja para los habitantes; este es el caso del barrio Robledo, el cual tiene en sus inmediaciones la vía de acceso conocida como la "vía al mar". La congestión vehicular en la vía que atraviesa el parque de este barrio genera problemas ambientales y sociales (dificultades de tránsito peatonal en horas de ingreso y salida de instituciones educativas), lo que ocasiona incrementos en los tiempos de viaje y taponamientos en las vías e intersecciones.
La situación previamente descrita se presenta comúnmente en la llamada hora pico, y representa para los viajeros pérdidas de tiempo y alto consumo de combustible [6], [9], [10]. Las restricciones propias de la vía caso de estudio son las de imposibilidad de circulación de vehículos de carga pesada y, dada la presencia de centros educativos, la de una velocidad máxima permitida de 30 km/hora (equivalente a 0,5 km/minuto).
Para analizar la situación de esta vía se propone emplear modelos de simulación basados en agentes (SBA), en los cuales se busca representar un escenario similar a la realidad. Estos permiten simular las diferentes configuraciones, acciones e interacciones de individuos autónomos dentro de un entorno en específico, para visualizar el comportamiento general de la problemática planteada [8], [11], [12].
2. Metodologa
La simulación basada en agentes es uno de los paradigmas de simulación que permite y se fortalece en la interacción entre agentes, individuos autónomos y heterogéneos en un entorno en donde se facilita la medida entre agentes y sus reacciones en un espacio controlado [13], [14]. Esta simulación permite a los individuos, con su propio grupo de características y reglas, ser creados. Estos individuos pueden ser ubicados en ambientes o recreaciones realísticas, y sus interacciones (tanto consigo mismo como con el entorno) pueden ser graficadas. La capacidad para capturar y entender el comportamiento individual de actores heterogéneos a través de múltiples escalas espaciales y temporales brinda una riqueza única para comprender los procesos y los impulsores que dan forma a los sistemas sociales y geográficos [15], [16].
La emergencia es una propiedad clásicamente exhibida por los modelos de agentes; ocurre cuando un atributo que puede ser descrito en un nivel del sistema no es específicamente codificado en el nivel individual. Esto puede llevar a "sorpresas" cuando las codificaciones a nivel individual resultan en un inesperado comportamiento del sistema a nivel macro. La mayoría de las personas cuando se encuentran con un comportamiento emergente tienden a no identificarlo y a responsabilizar de dicho comportamiento a modelos o resultados determinísticos de control centralizado. Los sistemas complejos son caracterizados por fenómenos o patrones emergentes que suelen parecer complejos, sin embargo, se pueden representar con reglas simples [17].
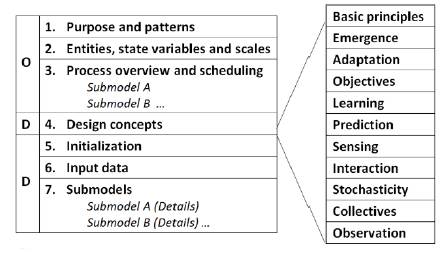
El protocolo ODD (Overview, Design Concepts and Details) surge de la necesidad de replicar y comprender los modelos de simulación del paradigma de agentes. Este concepto, desarrollado en 2006, revisado en 2010 y revisado y complementado en 2020, en el presente protocolo ha permitido una unidad en los modelos y una estandarización en la realización de simulaciones basadas en agentes [18], [19], [20], (ver figura 1)
Mediante la simulación basada en agentes, y usando el protocolo ODD, se realiza un modelo que permite visualizar y aplicar diferentes políticas en un entorno controlado: en relación con el flujo vehicular de un sector de la ciudad de Medellín (barrio Robledo) [21] en donde confluye un conjunto de construcciones de tipologías mixtas que afectan la movilidad del sector. A continuación, se presenta el protocolo ODD con los detalles correspondientes al modelo.
2.1. Modelo
El detalle relacionado con el modelo simula el movimiento vehicular representado en los agentes que recorren una ruta de acceso a Medellín por el sector de Robledo. En esta se habilita la llegada y salida de vehículos en un recorrido bidireccional y altamente transitado.
Los vehículos ingresan al sistema desde la parte inferior derecha, la cual representa el punto inicial, y se mueven de la siguiente manera. Los agentes se mueven uniformemente uno tras otro. Cuando se usa el método de movimiento del vehículo, el sistema valida si acelera o desacelera el vehículo con base en su entorno. El agente que lo sigue se desplaza al vecino más cercano en la dirección sureste noroeste si el parche se encuentra disponible y así, sucesivamente, para todos los vehículos del sistema (dos vehículos no pueden ocupar la misma posición).
El modelo tiene las siguientes características específicas de inicialización:
-
La longitud aproximada de la vía que atraviesa el parque de Robledo desde el cruce de la avenida 80 con calle 65 hasta el cruce de la calle 65 con la carrera 89 (vía al mar) es de aproximadamente 0,9 km.
-
La calzada de la vía en sentido noroeste solo tiene un carril, y el máximo de vehículos que permite la vía es de 120.
-
El presente modelo no tiene en cuenta las motocicletas, ya que estas generalmente no ocupan un carril dentro de la vía, sino que circulan al lado de los demás automóviles
-
El número aproximado de vehículos que pueden confluir en la vía es de 133 vehículos por kilómetro.
2.2. Protocolo ODD
El protocolo ODD para describir modelos basados en agentes e individuos (ABM) ahora es ampliamente aceptado, y se utiliza para documentar dichos modelos en artículos de revistas. El presente protocolo es usado como documento estandarizado para proporcionar una descripción coherente, lógica y legible de la estructura y dinámica de los ABM. Algunos grupos de investigación también lo encuentran útil como flujo de trabajo para el diseño de modelos. A continuación, se numera de la misma forma que se sugiere en la figura 1.
2.2.1. Propósito y patrones
Modelar y representar las estrategias y/o metodologías para buscar alternativas que reduzcan el impacto de la congestión vehicular presentada en la vía que atraviesa el parque de Robledo.
2.2.2. Entidades, variables de estado y escalas
La calle que atraviesa el parque de Robledo es una vía principal, la cual presenta un alto flujo vehicular en las horas pico del día y los fines de semana. El agente será representado por medio de carros, el mundo en NetLogo será cuadrado y, a su vez, permitirá colocar una imagen que represente la vía principal. El tiempo se mide en minutos.
Se debe tener en cuenta la longitud y las observaciones realizadas en la vía, en la cual pueden circular al tiempo un promedio de 120 vehículos (agentes); los minutos por hora son representados en 300 tics (un tic representa la unidad de tiempo en el software de simulación NetLogo). Para el presente proceso se inspecciona el primer agente, cuyo recorrido no tiene detenciones. En el presente modelo se analiza la ruta a recorrer por los agentes, de acuerdo con Google Maps®; se valida la distancia del recorrido de acuerdo con la figura 2, y se estima un recorrido promedio de 980 metros.
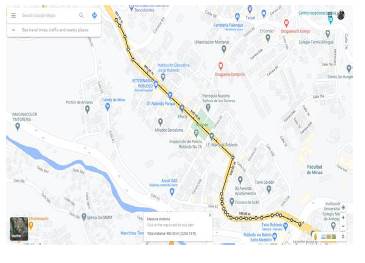
Figura 2
Recorrido a evaluar (amarillo).
Fuente: Google Maps®.
Con base en lo anterior, la ecuación de velocidad es (1).
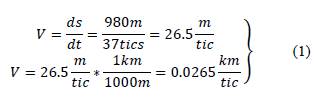
Si se estima un recorrido de 30 km/hora, se deben aproximar los tics a horas, como se ve en la ecuación (2).

Por lo tanto, z equivale a una constante de conversión mediante la cual 1132 tics equivalen a una hora.
2.2.3. Revisión de procesos e itinerario
El agente recorre el mundo, el cual se encuentra distribuido por un conjunto de parches; la ruta se resalta en color rojo, de acuerdo con la figura 2, la cual representa la vía y distancia por donde transitan los carros. Para la distribución de los carros se deben tener en cuenta cuatro restricciones:
-
Un carro no puede ocupar la misma posición del otro.
-
El desplazamiento debe realizarse a través de la ruta definida.
-
Cuando los agentes lleguen a la última posición del parche, estos salen del sistema para evitar aglomeraciones en la última posición y así permitir ingresar carros nuevos en dicha vía.
-
La velocidad máxima permitida en la zona es de 30 km/h, reglamentado por el Código Nacional de Tránsito de Colombia [22].
El modelo representa la concurrencia de vehículos en la vía descrita y pretende simular la problemática actual en el sector; los agentes recorren la ruta desde la parte inferior derecha del mapa (sur-este) y avanzan hacia la parte superior izquierda (norte-oeste).
El presente modelo utiliza los siguientes submodelos, los cuales se detallan a continuación.
-
Orientación de los agentes: cada agente debe recorrer la ruta como se describe previamente.
-
Velocidad: el movimiento de los agentes y su recorrido al momento de desplazarse se realiza de acuerdo con los parámetros de orientación descritos previamente.
-
Velocidad límite (vel-límite): es la velocidad máxima que un agente puede alcanzar cuando se encuentre en movimiento por los parches sin restricciones.
-
Velocidad mínima (vel-mín.): Registra el estado sin movimiento del agente y el tiempo detallado con este estado.
-
Deceleración: por medio de esta variable los agentes pueden reducir su velocidad.
-
Aceleración: por medio de esta variable los agentes pueden aumentar su velocidad.
2.2.4. Conceptos de diseño
Principios básicos: un vehículo debe recorrer la ruta trazada y detenerse si no posee el espacio para continuar avanzando. La velocidad y las detenciones son capturadas para análisis y estadísticas.
Emergencia: se puede presentar congestión en el desplazamiento de los carros, de acuerdo con la cantidad de estos. Un comportamiento emergente similar al propuesto por Wilensky se presenta en el modelo [10].
Adaptación: el modelo realiza su proceso de adaptación con un ciclo de vida de los agentes. A medida que se completa la ruta, estos salen del sistema permitiendo la llegada de nuevos agentes.
Objetivos: los agentes tienen como meta realizar el recorrido de la ruta sin importar el tiempo que les tome.
Detección e interacción: los agentes están en continua evaluación del entorno y sus velocidades se actualizan en función de la velocidad del agente vecino a su noroeste.
Estocasticidad: el modelo presenta aleatoriedad en los conceptos de velocidad, y la cantidad de agentes que ingresa al modelo está entre 1 y 2 por cada agente que sale del sistema. Para el modelo, tres tics equivalen aproximadamente a un segundo, y el flujo vehicular se establece tanto por la ocupación del espacio como por la velocidad.
Observaciones: la relación de movimiento y velocidad se especifica en la sección "Entidades, variables de estado y escalas", y las métricas de sus movimientos se detallan por la aceleración (máxima y mínima) y la cantidad de vehículos.
2.2.5. Inicialización
En la figura 3 se muestra en color rojo la vía por donde los agentes recorren el mundo, ya representada en el software Netlogo [23].
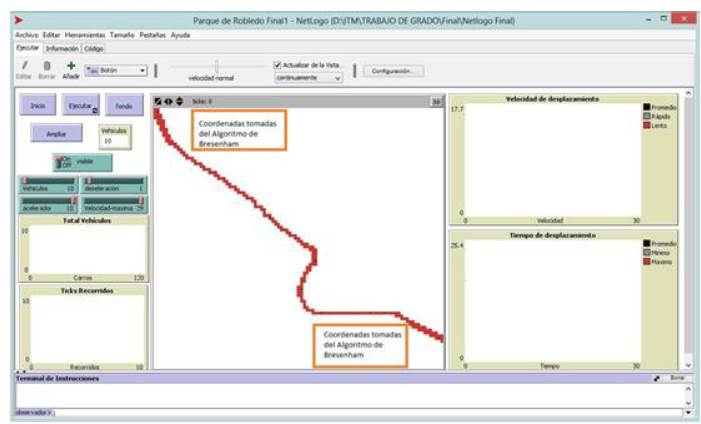
Figura 3
Imagen del entorno realizado para la simulación con la vía actual, tomada de NetLogo®.
2.2.6. Datos de entrada
Los vehículos del modelo son homogéneos, no presentan averías en su recorrido y su estado inicial es tomado de acuerdo con la norma para un total de cero agentes al momento de iniciar la simulación [22], [24].
Las variables asignadas a agentes, como la velocidad, son definidas en su estado inicial con las limitaciones descritas anteriormente de 30 km/h y 0 km/h cuando no tienen desplazamiento.
El modelo permite modificar la cantidad de vehículos entre 1 y 120, con dos controles de aceleración y desaceleración, los cuales limitan los agentes en el rango entre 1 y 10 km/h.
Computacionalmente no representa un alta combinatoria de resultados y permite gran cantidad de ejecuciones en poco tiempo en un computador de acuerdo con lo establecido por [26].
3. Resultados
El modelo se ejecuta con las siguientes consideraciones: se realiza el conteo de agentes tipo vehículo y se define la media de su velocidad por iteración en conjunto con dos variables iniciales que controlan la aceleración del vehículo y una variable general que define la cantidad de vehículos al inicio de la simulación. Con base en lo anterior, se realizan 10.000 ejecuciones y 10 repeticiones de la simulación, para un total de 100.000 registros, los cuales permiten identificar el estado estable, de acuerdo con lo descrito por el método warm up time, [25] en donde la estimación de parámetros se debe realizar bajo condiciones de estabilidad del sistema, ya que los análisis se deben realizar después de un tiempo t que exceda el momento
El estado estable se identifica entre la iteración 1000 y 1100, con un nivel de confianza a del 5 %, y se detecta un cambio creciente en el modelo hasta llegar a una estabilidad como lo muestra la figura 4.
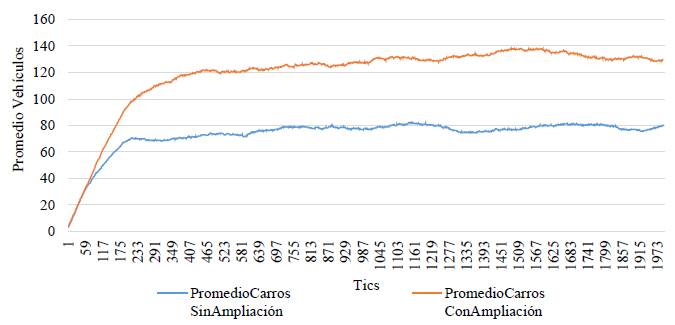
Figura 4
Promedio de vehículos en el sistema con y sin ampliación de la vía.
Fuente: elaboración propia.
La simulación se ejecuta aproximadamente por dos horas y respecto a la cantidad de vehículos en el sistema, se calcula un promedio fundamentado en los siguientes aspectos:
-
La cantidad de vehículos en el sistema se calcula de acuerdo con un promedio de las diez corridas en cada tic o unidad de simulación.
-
Se consideran los dos escenarios de interés: con y sin aplicación de la carretera; se comparan gráficamente de acuerdo con la figura 4.
La estabilidad está relacionada con la confiabilidad de los resultados de las simulaciones, ya que durante estas los promedios de las variables muestran inestabilidades conocidas como "periodos de transición". Luego de un tiempo extenso, las variables pueden llegar a un "periodo permanente" o "periodo de estabilidad". En el modelo se cuenta con 2000 iteraciones en 10 repeticiones para identificar el estado estable y realizar su supresión.
De acuerdo con la figura 4 se puede inferir el inicio del estado estable para la cantidad de vehículos por iteración entre los valores 170 tics y 230 tics. Además, se puede observar que en el modelo con el escenario sin ampliación de carretera, la cantidad máxima de vehículos a circular, de acuerdo con los cuartiles representados en el gráfico de cajas y bigotes (figura 5), sería entre 77 y 82. Para el escenario con ampliación de carretera, el modelo presenta una mayor cantidad de vehículos a transitar, con valores de los dos últimos cuartiles entre 128 y 138, lo que mejora en un 66 % el flujo vehicular (ver figura 6).
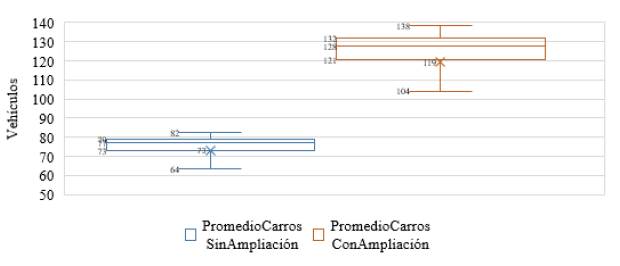
Figura 5
Diagrama de caja y bigotes para la cantidad de vehículos en el sistema con y sin ampliación de la vía.
Fuente: elaboración propia.
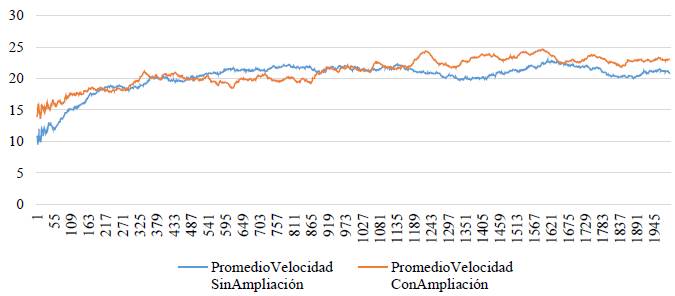
Figura 6
Velocidad promedio para los vehículos en el sistema con y sin ampliación de la vía.
Fuente: elaboración propia.
Para efectos de los datos ilustrados en la figura 7, se debe tener presente que la velocidad a la que se hace referencia es la promedio al momento de realizar desplazamientos, ya que por diferentes circunstancias de la vía se hace necesario que los vehículos durante su tránsito deban acelerar, desacelerar, frenar e incluso esperar mientras las circunstancias de congestión vehicular en la vía permiten el avance.
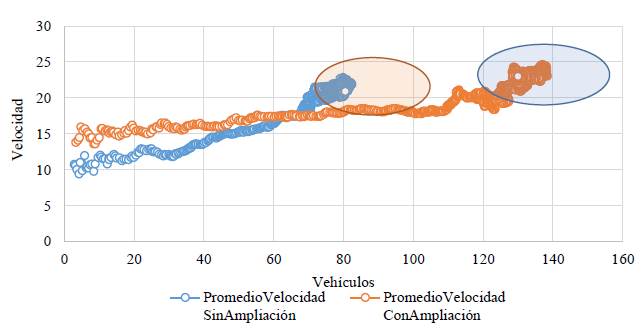
Figura 7
Promedios velocidad y cantidad de vehículos en el sistema con y sin ampliación de la vía.
Fuente: elaboración propia.
Según observaciones realizadas en las condiciones actuales de la vía, y sin la presencia de congestión vehicular, un vehículo que circule a una velocidad aproximada de 15 km/hora demora dos minutos en realizar el recorrido evaluado. Ahora, bajo la situación actual en las diferentes mediciones obtenidas a través de Netlogo, para un número distinto de vehículos en la vía y con congestión vehicular moderada, se puede notar que la velocidad promedio de circulación oscila entre 1,21 y 11,09 km/hora. Esto debido a que los vehículos en la vía deben continuamente acelerar, desacelerar y frenar por presencia de congestión vehicular. Por lo tanto, el tiempo promedio de desplazamiento por dicha vía oscila entre 8,83 y 15,73 minutos (ver figura 7).
Al realizar la simulación bajo el supuesto de presencia de congestión vehicular, la velocidad oscila entre 4,91 y 13,08 km/hora, pero debido al tráfico lento y la obligación constante de detenerse en la vía a la espera de que la congestión permita avanzar, el tiempo de desplazamiento por dicha vía es de aproximadamente 29,00 minutos (un aumento de 27 minutos en el tiempo de desplazamiento por dicha vía).
4. Resultados
A partir de los resultados obtenidos por medio de la simulación basada en agentes, se afirma que, bajo las condiciones de vía actual, a mayor número de vehículos en la vía, la velocidad de circulación disminuye, lo cual propicia que la congestión vehicular y el tiempo de desplazamiento aumenten. Por lo tanto, una posible solución al problema es la planteada en el modelo construido, en el cual se procede a realizar una ampliación de la vía, incrementando su capacidad y disminuyendo el tiempo de desplazamiento de los vehículos.
La utilización del protocolo ODD detalla una correcta estructura para modelos de simulación basados en agentes, facilita y reduce el tiempo de escritura y lectura de los modelos, mejora su replicabilidad y genera una completa y apropiada descripción del modelo, que incluye las características necesarias para su coherente interpretación.
La utilización de la herramienta conceptual para la elaboración del modelo NetLogo facilita el procedimiento y ejecución del modelo, debido a que facilita la elaboración de dichos modelos en un entorno relacionado con los agentes y su entorno en ambientes de fenómenos sociales complejos y de baja a gran escala. Esto permite la exploración completa de las conexiones entre los vehículos (agentes) y el macro mundo que los rodea, facilitando la extracción de datos y sus relaciones mediante el uso de hojas de cálculo.
En el modelo presentado se evidencia un comportamiento convergente, ya que, sin importar la frontera de tiempo de simulación, la velocidad promedio de los vehículos se estabiliza en valores cercanos a 24 km/h. Al incrementar en un 20 % la velocidad de desplazamiento y la capacidad de la vía, se pasa de un valor de 60 vehículos a más de 130 vehículos en el sistema, lo cual optimiza su utilización.
Referencias
B. Giles-Corti, B. Zapata-Diomedi, A. Jafari, A. Both, L. Gunn, "Could smart research ensure healthy people in disrupted cities?", J. Transp. Heal., vol. 19, pp. 100931, 2020, doi: https://doi.org/10.1016/j.jth.2020.100931.
S. El Hamdani , N. Benamar, M. Younis, "A protocol for pedestrian crossing and increased vehicular flow in smart cities", J. Intell. Transp. Syst. Technol. Planning, Oper., vol. 24, no. 5, pp. 514-533, 2020, doi: https://doi.org/10.1080/15472450.2019.1683451.
A. Mourad, J. Puchinger, C. Chu, "A survey of models and algorithms for optimizing shared mobility," Transp. Res. Part B Methodol., vol. 123, pp. 323-346, 2019, doi: https://doi.org/10.1016/j.trb.2019.02.003.
L. Alekszejenkó, T. Dobrowiecki, "Alleviating Congestion in Restricted Urban Areas with Cooperative Intersection Management", enAdvances in Intelligent Systems and Computing, vol. 1250, 2021, pp. 34-52, doi: https://doi.org/10.1007/978-3-030-55180-3_3.
P. Minh Duc et al., "HoanKiemAir: Simulating impacts of urban management practices on traffic and air pollution using a tangible agent-based model", enConferencia Internacional de la RIVF sobre Tecnologías de la Computación y la Comunicación (RIVF), 2020, doi: https://doi.org/10.1109/RIVF48685.2020.9140787.
F. Orsi, A. Scuttari, A. Marcher, "How much traffic is too much? Finding the right vehicle quota for a scenic mountain road in the Italian Alps", Case Stud. Transp. Policy, vol. 8, no. 4, pp. 1270-1284, 2020, doi: https://doi.org/10.1016/j.cstp.2020.08.007.
A. Grignard et al., "The Impact of New Mobility Modes on a City: A Generic Approach Using ABM", enSpringer Proceedings in Complexity, 2018, pp. 272-280, doi: https://doi.org/10.1007/978-3-319-96661-8_29.
C. A. Moncada, J. P. Bocarejo, D. A. Escobar, "Evaluación de Impacto en la motorización como Consecuencia de las Políticas de Restricción Vehicular, Aproximación Metodológica para el caso de Bogotá y Villavicencio - Colombia", Inf. tecnológica, vol. 29, no. 1, pp. 161-170, 2018, doi: http://dx.doi.org/10.4067/S0718-07642018000100161.
W. X. Ci, S. K. Ahmed, M. Ieee, F. Zulkifli, A. K. Ramasamy, "Traffic Flow Simulation at an Unsignalized T-Junction using Monte Carlo Markov Chains", enIEEE International Conference on Signal and Image Processing Applications, 2009, pp. 346-351, doi: https://doi.org/10.1109/ICSIPA.2009.5478675.
U. Head, B. Rand, W. Wilensky, "NetLogo Traffic Basic Adaptive Individuals model", 2015, [En línea]. Disponible en: http://ccl.northwestern.edu/netlogo/models/TrafficBasicAdaptiveIndividuals
S. C. Carrizo, "Biocombustibles en Argentina, entre Necesidades Energéticas e Intereses Agroindustriales", PAMPA, vol. 4, no. 4, pp. 229-248, 2008, doi: https://doi.org/10.14409/pampa.v1i4.3159.
B. Jiang, C. Yang, T. Terano, "Adaptive agent model with hybrid routing selection strategy for improving the road-network congestion problem", J. Harbin Inst. Technol. New Ser., vol. 22, no. 6, pp. 92-102, 2015, doi: https://doi.org/10.11916/j.issn.1005-9113.2015.06.013.
G. N. Gilbert y K. G. Troitzsch, Simulation for the social scientist, 1st ed. New york: Open University Press, 2005.
N. Gilbert y P. Terna, "How to build and use agent-based models in social science", Mind Soc., vol. 1, no. 1, pp. 57-72, 2000, doi: https://doi.org/10.1007/BF02512229.
A. J. Heppenstall, A. T. Crooks, L. M. See, M. Batty, Agent-based models of geographical systems. London: Springer Science & Business Media, 2011.
A. Crooks, Agent-based Models and Geographical Information Systems, en "Geocomputación: un manual práctico". Live Oaks, CA, USA: AGE Publications Ltd, Thousand, 2015, pp. 63-77.
U. Wilensky, W. Rand, An introduction to agent-based modeling, and engineered complex systems with NetLogo. MA, USA: The MIT Press, 2015.
J. G. Polhill, D. Parker, D. Brown, V. Grimm, "Using the ODD Protocol for Describing Three Agent-Based Social Simulation Models of Land-Use Change", J. Artif. Soc. Soc. Simul., vol. 11, no. 2, pp. 3, 2008.
V. Grimm, U. Berger, D. L. DeAngelis, J. G. Polhill, J. Giske, S. F. Railsback, "The ODD protocol: A review and first update", Ecol. Modell., vol. 221, no. 23, pp. 2760-2768, 2010, doi: https://doi.org/10.1016/j.ecolmodel.2010.08.019.
V. Grimm et al., "The ODD protocol for describing agent-based and other simulation models: A second update to improve clarity, replication, and structural realism", Jasss, vol. 23, no. 2, pp. 7, 2020, doi: https://doi.org/10.18564/jasss.4259.
DANE, "PIB por departamento", [En línea]. Disponible en: https://www.dane.gov.co/index.php/estadisticas-por-tema/cuentas-nacionales/cuentas-nacionales-departamentales.
Ministerio de Transporte de Colombia, Ley 769 de 2002 - Código Nacional de Tránsito Terrestre. 2002, pp. 57.
U. Wilensky, NetLogo: Center for Connected Learning Comp.-Based Modeling. Evanston, IL: Universidad del Noroeste., vol. 158, 1999.
"Velocidad y tiempo de viaje GT," Secretaría de Movilidad de Medellín - Observatorio de Movilidad,
S. Robinson, "A statistical process control approach to selecting a warm-up period for a discrete-event simulation", Eur. J. Oper. Res., vol. 176, no. 1, pp. 332-346, 2007, doi: https://doi.org/10.1016/j.ejor.2005.07.014.
F. E. Ritter, M. J. Schoelles, K. S. Quigley, L. Cousino, "Determining the Number of Simulation Runs: Treating Simulations as Theories by Not Sampling Their Behavior", enRothrock L., Narayanan S. (eds) Human-in-the-Loop Simulations. Springer, London, 2011, pp. 97-116, doi: https://doi.org/10.1007/978-0-85729-883-6_5.
Notas
