Artículos
Received: 09 November 2023
Accepted: 07 March 2024
Published: 27 April 2024
DOI: https://doi.org/10.18273/revuin.v23n2-2024011
Resumen: La revisión bibliográfica presentada a continuación contiene un compendio de la información necesaria e indispensable para tener en cuenta, a cerca del diseño y desarrollo de prótesis de miembro inferior. El documento presenta los aspectos más importantes tomados de 91 trabajos diferentes, de alto impacto, y relacionados con esta temática. Al finalizar el documento, se presenta una sección con las conclusiones y aspectos más importantes, además de mostrar los futuros desafíos y expectativas que se tienen con respeto a las prótesis de miembro inferior.
Palabras clave: Diseño, prótesis de miembro inferior, desarrollo de prótesis, control de prótesis, biomecánica.
Abstract: The following literature review provides a comprehensive compilation of essential information concerning the design and development of lower limb prostheses. The document encompasses critical aspects gleaned from 91 distinct, high impact works related to this subject. Upon concluding the document, a section is presented, summarizing key findings and significant insights, along with an exploration of future challenges and prospects in the field of lower limb prosthetics.
Keywords: Design, lower limb prosthesis, prosthesis development, prosthesis control, biomechanics.
1. Introducción
La marcha es descrita como principal forma de desplazamiento de un lugar a otro del ser humano [1], siendo común que en un ambiente urbano una persona camine 6500 pasos por día [2]. Esto complica la realidad de un alto número de personas, que actualmente padecen una discapacidad de movilidad relacionada con el miembro inferior. En Colombia para el año 2010 el 10% de la población tenía alguna discapacidad, siendo principales las relacionadas con la movilidad de miembros superior o inferior [3], [4]. Entre las causas de estas discapacidades se encuentra: la disvascularidad, infecciones y diversos traumas [5]; estas afecciones ocasionan amputaciones en el 90% de los casos, siendo las más comunes las transtibiales (53%) y las transfemorales (39%) [5]. En Colombia las amputaciones se presentan entre el 5% y 10% del total de discapacidades que son ocasionadas por enfermedades vasculares, diabetes, tumores, traumas o accidentes de autos [4]. Entre las principales causas de amputaciones de miembro inferior en Colombia se encuentran el conflicto armado y las minas antipersonales [3].
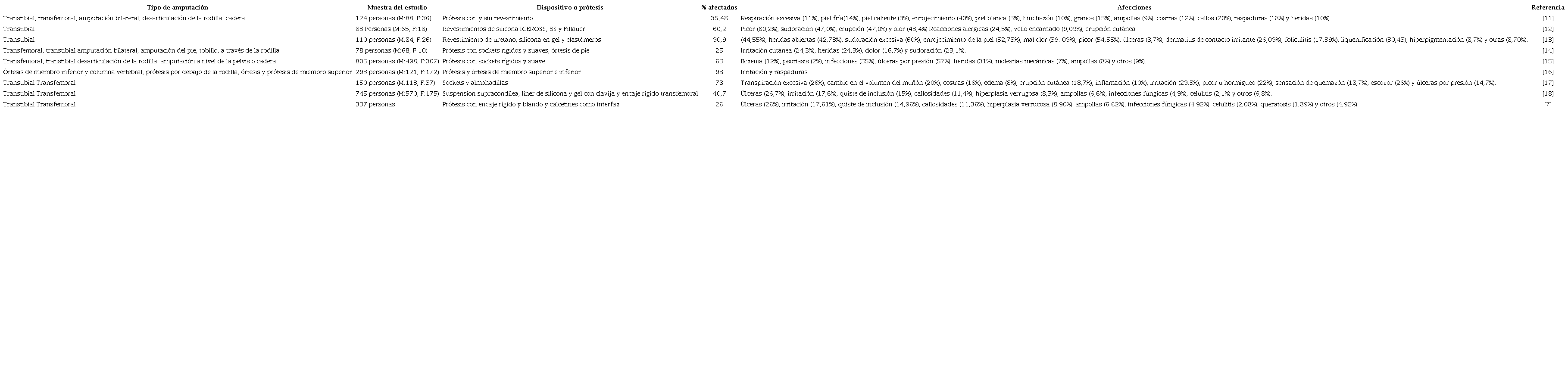
En Colombia para el año 2022 se reportan un total de 9.829 heridos debido a minas antipersonas [6]; complementando las 63.000 personas que para el año 2015 presentaban afecciones del miembro inferior, relacionadas con parálisis o pérdida [4]. Para estas personas, los dispositivos protésicos del mercado fallan en satisfacer sus requerimientos, presentando molestias corporales, o afecciones relacionadas a nivel de la columna vertebral o cadera. Otro aspecto, es que los usuarios expresan que los dispositivos no mitigan las fuerzas durante la marcha ocasionando dolencias, malestar, perturbaciones o irritaciones [4]. Estudios internacionales también relacionan problemas dermatológicos como las úlceras, cistitis y dermatitis de contacto (Tabla 1) que generan el abandono del uso de la prótesis [7]. Todas las problemáticas mencionadas se presentan debido a que las prótesis fallan en cumplir su función principal de adaptarse al movimiento del muñón para realizar una marcha fluida y adecuada en conjunto con el miembro sano [8]. Entre los principales desafíos del desarrollo de prótesis de miembro inferior se encuentran: diseño biocompatible de bajo costo y económico, que permita la eliminación de los dolores fantasmas del usuario [9], [10].
Las afecciones y problemáticas ya mencionadas ocasionan que aproximadamente el 50% de los usuarios de prótesis transtibiales no las usen regularmente, siendo incluso mayor el porcentaje para los usuarios de prótesis transfemorales [19], [20], [21]. Sumado a esto, existe aún desconocimiento generalizado acerca de cómo se comportan los tejidos blandos vivos, su respuesta a cargas externas y propiedades mecánicas; lo que ocasiona que, en la práctica clínica, el diseño y manufactura de prótesis, sea un proceso empírico, iterativo, laborioso, en el cual aún se desperdicia grandemente materia prima, y que depende altamente de las habilidades y experiencias del fabricante [10].
Como solución a las problemáticas presentadas en el uso de las prótesis de miembro inferior, el presente trabajo muestra una revisión bibliográfica metodológica que permita identificar brechas o lagunas en el conocimiento existente en el campo de las prótesis de miembro inferior, además de definir áreas que no han sido suficientemente abordadas y profundizadas. La revisión acá presentada muestra un resumen de los principales trabajos de diseño de prótesis de miembro inferior, resaltando los más efectivos y novedosos relacionando materiales, funcionalidades y características específicas de cada diseño; con el propósito que, en futuras investigaciones y trabajos, los diseñadores tengan una base de datos confiable y segura, en la cual basarse para el desarrollo de sus proyectos. Para la realización de esta revisión se estudiaron y analizaron 91 trabajos diferentes relacionados con el diseño, fabricación y control de prótesis de miembro inferior, así como las estadísticas de usuarios y afecciones y enfermedades de estos.
2. Metodología
Para el desarrollo de la presente revisión bibliográfica se realizó una búsqueda estructurada en las plataformas de Elsevier, IEEE, Science Direct y Scholar Google, con las palabras clave de: "Prothestic design", "lower limb prothestic", "active lower limb prothestic", "bionics", "biomechanics", "mechanica design", "lower limbr prothestic control" y "pasive lower limb prothestic". Con esta búsqueda se encontraron 210 trabajos e investigaciones, los cuales después de depurar y filtrar se redujeron a 91 trabajos, los cuales son presentados en esta revisión bibliográfica.
3. Resultados
3.1. Prótesis de miembro inferior
Las prótesis de miembro inferior pueden ser clasificadas en tres grandes grupos: prótesis pasivas, semiactivas y de accionamiento eléctrico. Las prótesis pasivas son las más antiguas y tradicionales de las tres, comúnmente accionadas mediante resortes y amortiguadores. Las prótesis semiactivas normalmente cuentan con un sistema accionado mediante un microprocesador que alterna el funcionamiento y comportamiento del dispositivo. Las prótesis de accionamiento eléctrico normalmente emplean ayuda mecánica mediante motores que asisten la movilidad del usuario [1].
Las prótesis de miembro inferior principalmente pueden ser agrupadas en dos grandes clases. La primera, son aquellas prótesis que son diseñadas y aplicadas en individuos que sufrieron de una amputación transtibial. Comúnmente esta amputación se realiza en un nivel entre los 12 y 15 centímetros por debajo de la rodilla, siendo uno de los principales problemas el dolor que soportan los pacientes en el muñón debido al balanceo de todo el peso corporal sobre este [22]. La prótesis transtibial es un sistema mecánico cuya geometría está dividida en tres principales áreas: socket, tibia y pie, las cuales comúnmente se diseñan para escenarios y funciones específicas [23].
Recuento de estudios acerca de afecciones y problemas en la piel debido al uso de prótesis y órtesis
Para el diseño y control de las prótesis desde hace mucho tiempo se han planteado dos enfoques; el primero es la actuación pasiva, en el cual el dispositivo no tiene actuadores que contrarresten las fuerzas generadas por la marcha del paciente; y el segundo es la actuación activa, donde se incorporan motores y actuadores neumáticos en el dispositivo, especialmente diseñados para evitar que se genere un desgaste adicional en el paciente durante la marcha.
El segundo grupo son las prótesis especialmente desarrolladas para dar una solución a individuos que han sufrido de amputación a nivel transfemoral o en el muslo. Este tipo de amputaciones son las más comunes y comúnmente permiten una longitud del muñón de entre 25 a 30 centímetros [22]. Una de las principales problemáticas de una amputación a nivel transfemoral es la pérdida de los parámetros de movimiento que han sido perfeccionados por el cuerpo, específicamente por el cerebro durante el pasar de los años; por lo tanto, el principal objetivo de una prótesis es recuperar esos parámetros [24]. Con ese objetivo en mente, se observa que una de las mayores dificultades en el desarrollo de una prótesis transfemoral es el control de los dispositivos, mecanismos y actuadores que la componen, con el propósito que trabajen en sincronía con los componentes biológicos de la extremidad sana para que se lleve a cabo la marcha. La estrategia de control más utilizada es el control basado en electromiografía [24].
3.2. Materiales
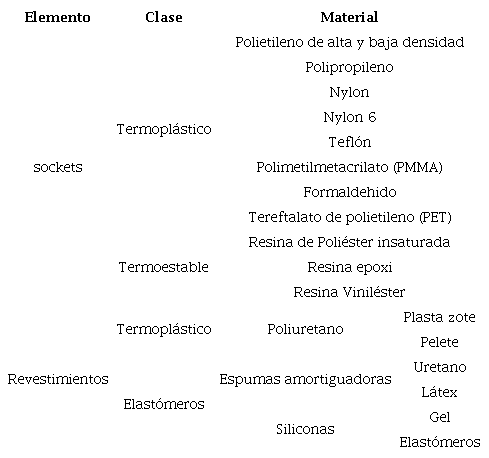
El uso de las prótesis de miembro inferior se relaciona con diversas enfermedades y afecciones de la piel como úlceras, quistes y dermatitis de contacto [7]; siendo uno de los mayores desafíos de estos dispositivos evitar o controlar los daños en la piel de los usuarios, a lo que se suma el deseo de aliviar el dolor del paciente, controlar las deformaciones, prevenir una excesiva amplitud de movimiento articular, protección de los tejidos y promoción de la cicatrización [18]. Para esto, se han desarrollado sockets o encajes de diversos materiales, especialmente de polímeros (ver Tabla 2) donde cada uno presenta sus ventajas y desventajas. Los termoplásticos son fáciles de moldear y ajustar, pero pueden ser menos duraderos y causar problemas en la piel si no se ajustan adecuadamente. Los termoestables son más resistentes, pero son más difíciles de moldear y ajustar. Las espumas y los geles proporcionan una buena amortiguación y comodidad, pero pueden ser menos duraderos y absorber el sudor, causando problemas en la piel. Los elastómeros son muy flexibles y duraderos, pero pueden ser menos cómodos debido a su rigidez [25].
Futuras investigaciones están centrándose en el desarrollo de nuevos materiales, o combinando los ya existentes, para crear dispositivos que se adapten a las necesidades específicas del usuario, que sean cómodos, duraderos y prevengan las afecciones de la piel [26].
Hablando específicamente de los materiales utilizados para la producción de las prótesis, se requiere de estos que sean lo suficientemente flexibles para adaptarse al cuerpo y absorber la energía generada durante el ciclo de la marcha, y lo suficientemente rígidos para controlar la deflexión por las cargas, también se hace necesario que soporten los esfuerzos normales de tensión y compresión generados durante la flexión, además de los esfuerzos cortantes que se presentan en las uniones articulares [27], [28], [29], [30]. Otros aspectos para tener en cuenta a la hora de seleccionar los materiales para las prótesis son las características fisiológicas del muñón del paciente, puesto que individuos con poco recubrimiento alrededor del hueso del muñón requieren sockets con una baja resistencia a la compresión, mientras que aquellos con bastante recubrimiento prefieren sockets con una mayor resistencia, puesto que esto favorece a su control del dispositivo [31].
El uso de polímeros para la fabricación de órtesis externas y sockets de prótesis es común, sobresaliendo lo termoestables y los termoplásticos. Sin embargo, el uso de termoestables dificulta el proceso de fabricación del socket, debido a la dificultad de moldearlos incluso a altas temperaturas; por el contrario, los termoplásticos tienen un alto peso molecular y pueden ser moldeados por temperatura o presión. Los termoplásticos más comunes son el poliestireno y polipropileno [32]. El poliestireno presenta bajo peso, se moldea por vacío y se emplea en prótesis de miembro inferior que requieren una alta flexibilidad. El polipropileno siendo el plástico más ligero utilizado en prótesis, se caracteriza por su alta resistencia, rigidez y dureza. Entre sus limitantes se resaltan su sensibilidad a la deformación y deterioro por calor [18], [27].
Los dispositivos protésicos también pueden ser fabricados mediante el uso de materiales compuestos [33], siendo comunes el empleo de resinas de poliéster de baja saturación, epoxi y viniléster [18]. Entre los casos de estudio más efectivos, se resalta el uso de resinas de epoxi reforzadas por nanotubos de carbón para el desarrollo de elementos de soporte para prótesis de miembro inferior. La inclusión del carbón en la resina aumentó la resistencia contra la flexión en un 11.38% y la resistencia térmica en un 4.5% [32].
El uso de las fibras es común para la fabricación de sockets, gracias a sus beneficios en la mejora de propiedades mecánicas como: resistencia, rigidez, dureza y estabilidad dimensional [27]. Las fibras de aramida aumentan ampliamente la resistencia del elemento, sin embargo, aún son inferiores a las fibras de vidrio o de carbón. La fibra de vidrio se usa en combinación con plásticos como el polipropileno y polietileno de alta densidad gracias a la mejora de sus propiedades mecánicas; sin embargo, algunos estudios también reportan una disminución del confort en los usuarios de la prótesis [33]. La fibra de carbón se usa en conjunto con los termoplásticos aumentando la rigidez y resistencia del material (35.000 PSI) mientras que, a su vez, reduce el peso del material reforzado [34].
El desarrollo de interfases blandas para absorber impactos es uno de los más grandes requerimientos de la fabricación de prótesis. Estas espumas se pueden fabricar a base de uretano siendo rígidas, flexibles o de densidad variable. Otros materiales ampliamente utilizados son el látex, poliuretano y polietileno [18].
Para el uso de las prótesis de miembro inferior, es común el uso de revestimientos para el muñón del paciente, hechos comúnmente de geles de silicona; siliconas de termoplásticos elastómeros (TPE) con algún aditivo, por ejemplo, las redes de poli siloxano [31]. Algunos estudios han reportado una mejora en el control de la prótesis y la disminución de heridas, raspones e irritaciones en la piel por el uso de revestimientos de silicona en el muñón de pacientes con prótesis transtibial [35].
3.3. Procesos de fabricación
Entre los principales procesos de fabricación de prótesis se encuentra la manufactura aditiva, en la cual, mediante la aplicación de la reconstrucción 3D del muñón del paciente, el diseño virtual de la calza y su producción mediante impresión 3D, para desarrollar dispositivos funcionales, cómodos y personalizados a las necesidades del cliente [36]. Algunos trabajos aplicando la impresión 3D, han desarrollado dispositivos protésicos empleando materiales como el ácido poli láctico (PLA) o el acrilonitrilo butadieno estireno (ABS) [37].
Los principales avances en la fabricación de prótesis se han centrado ampliamente en la producción de sockets que brinden un mejor servicio al usuario. Es así como algunos trabajos se han enfocado en hacer una revisión de la producción de estos dispositivos mediante técnicas de impresión 3D, centrados en producción de bajo costo, poco tiempo de fabricación y peso [38]. Otras investigaciones han enfocado sus esfuerzos en estudiar la relación entre los diferentes parámetros mecánicos y de diseño del socket, como esfuerzos, deformaciones, fluctuaciones de volumen y temperatura; y su relación con el confort del paciente [39].
Otros usos de la manufactura aditiva en la producción de prótesis de miembro inferior son la fabricación de los dispositivos de pie. En estas investigaciones se centran en el diseño y producción de dispositivos pasivos de diseño óptimo [40].
Polímeros utilizados de la fabricación de prótesis de miembro inferior
Para la fabricación de sockets y dispositivos protésicos se debe tener en cuenta una serie de factores y recomendaciones para producir un dispositivo efectivo y óptimo [41]. Las principales recomendaciones se presentan a continuación:
-
Se debe tener en cuenta la distribución de esfuerzos y deformaciones en el socket, pues estos afectan directamente el confort y bienestar del paciente, así como el desempeño del dispositivo.
-
Se recomienda el uso de sockets de superficie total, puesto que permiten un mayor uso del dispositivo y reduce el tiempo de colocación.
-
El uso de revestimientos viscoelásticos mejora la suspensión, distribución de carga, disminuye el dolor y aumenta la comodidad del paciente.
-
Para el uso de suspensión en la prótesis, se recomienda la suspensión por casquillos VAS (Vacuum Assisted Suspension), seguida por la suspensión por succión y finalmente la suspensión por pasador. Los sockets VAS disminuyen los cambios en el volumen del muñón del paciente y permiten una mejor distribución del paciente.
3.4. Principales dispositivos disponibles en el mercado
SACH es un dispositivo de pie protésico no articulado, diseñado para brindar soporte estructural sin permitir deformaciones elásticas [42]. ORION es una prótesis transfemoral pasiva que combina actuadores hidráulicos y neumáticos utilizados para controlar el torque y la velocidad angular en la rodilla respectivamente. El suministro de energía para la prótesis se realiza mediante el uso de una batería de iones de litio [43].
PLIE es una prótesis pasiva con microprocesador que permite una respuesta desde 10 a 20 veces más rápida contra tropiezos y caídas que otros dispositivos, pudiendo soportar un máximo de 125 Kg de la masa del paciente [44]. GENIUM también es una prótesis pasiva basada en microprocesador equipada con sensores IMU (unidad de medida de inercias), medición de ángulo de la rodilla, fuerza axial y torque; permitiendo la adquisición de datos en tiempo real de las cargas en el dispositivo, la posición instantánea, velocidad y aceleración en la articulación [45].
RHEO KNEE es una prótesis pasiva con microprocesador diseñada para adaptarse continuamente al ambiente y al estilo de marcha del usuario; el microprocesador facilita y apoya la marcha del usuario en lugares de difícil desplazamiento como pendientes y espacios estrechos [46]. EmPOWER es una prótesis transtibial activa enfocada en restaurar la funcionalidad y potencia de marcha del usuario. Estudios han demostrado que el uso de estas prótesis reduce el costo metabólico de la caminata en un 8% e incrementa la velocidad de la marcha en un 23%, en comparación con otras prótesis pasivas [47].
POWER KNEE es una prótesis transfemoral activa centrada en recuperar la capacidad muscular y los patrones de movimiento simétrico durante la marcha de los pacientes con amputación. Una de las características principales de este dispositivo es la reducción del tiempo de rehabilitación y adaptación del paciente, así como su capacidad de soporte de hasta 165 Kg [48]. SmartIP presenta una prótesis transfemoral adaptable combinando actuadores hidráulicos, neumáticos y electromecánicos. Su gran ventaja recae en que sus usuarios pueden operar la prótesis, durante la caminata en terrenos elevados y la no necesidad de ayuda externa al detenerse. Estudios demuestran que este dispositivo permite caminatas con un menor consumo metabólico de energía y una mayor velocidad de marcha [49], [50].
PROPRIO FOOT es una prótesis transtibial semiactiva cuyo principal objetivo es replicar la movilidad del pie humano mediante la aplicación de flexión motorizada del tobillo [9]. Estudios han demostrado que el uso del dispositivo mejora la cinética y cinemática de la marcha del paciente. El último dispositivo protésico revisado es C-Leg; una prótesis transfemoral equipada con una unidad de medición de inercias (IMU), galgas extensiométricas y sensores de medición angular en la rodilla. Las mediciones en tiempo real de los sensores son utilizadas para ajustar las resistencias y amortiguamiento durante las diversas fases de la marcha [51].
3.5. Estrategias de control
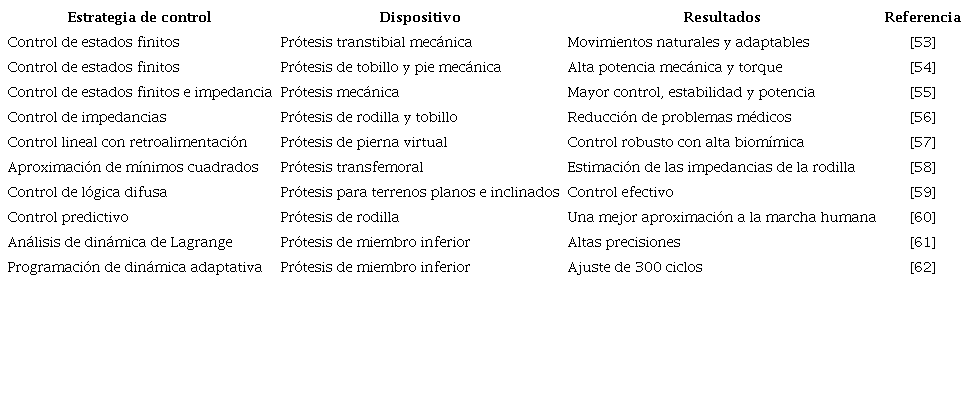
Es necesario resaltar que las estrategias de control utilizadas actualmente, aunque son efectivas, presentan deficiencias aún en el proceso de generación de una marcha mecánica y fisiológicamente cercana a la humana [9]. La Tabla 3 muestra un resumen de las técnicas de control de prótesis de miembro inferior, más empleadas en la actualidad.
Diversos trabajos se han realizado para adecuar apropiadamente el uso de señales de EMG en el control de prótesis de miembro inferior. [52] buscaron determinar la cantidad óptima de sensores de EMG a ser utilizados para realizar una clasificación adecuada de la intención de movimiento del usuario de prótesis de miembro inferior. Los resultados mostraron que se alcanzó el 90% de presión en la clasificación y predicción de la intención de movimiento de individuos sanos, utilizando de 3 a 4 sensores de EMG ubicados en la pierna derecha.
Otras investigaciones se centran no en determinar la cantidad adecuada de sensores, sino en mejorar los algoritmos y programas de clasificación utilizados para predecir la intención de movimiento del individuo. En estos programas es común el uso de técnicas y algoritmos como análisis lineales discretos (LDA) y redes neuronales (NN); los cuales presentan una precisión oscilante entre el 96% y 97%, en la clasificación del movimiento, incluso utilizando solo un canal para la lectura de señales de electromiografía [63]. Sin embargo, debido a que las señales de EMG son cíclicas y no estacionarias, es necesario el uso de técnicas especiales de reconocimiento y procesamiento su empleo en mecanismos de control; a lo que se suman problemas debido a fatiga muscular, mal ubicación e interferencia y errores de medición debido a señales de músculos aledaños [9].
3.6. Procesos de diseño del socket y mecanismo de suspensión
Los procesos de suspensión actualmente utilizados en la producción de prótesis de miembro inferior están directamente relacionados con el socket. Entre los métodos más tradicionales se tiene la suspensión por succión de ajuste cutáneo, por el cual se genera un entorno herético entre el revestimiento interno y el socket, mediante la expulsión del aire a través de una válvula unidireccional distal [19]. Otro método tradicional es la suspensión con pasador de bloqueo, el cual usa un pasador para enganchar un mecanismo de bloque instalado en el socket [21]. Finalmente, el mecanismo de suspensión del socket más reciente, aunque fue desarrollado en la década de 1990, es la suspensión de encaje asistida por vacío (VASS); la cual, aunque al principio se desarrolló para prótesis transtibiales, ha sido empleada con éxito en prótesis transfemorales y en encajes subisquiáticos. Este tipo de suspensión permite una distribución más uniforme de la presión en el socket, control de la fluctuación del volumen del muñón, y una mejor salud del muñón, en lo que respecta a afecciones y enfermedades [64], [65], [66], [67], [68], [69].
3.7. Modelado de elementos finitos
Entre las principales aplicaciones del modelado de elementos finitos (FE) en el desarrollo de prótesis de miembro inferior, se encuentra la simulación de las cargas y esfuerzos generados en el socket por la marcha del usuario [70]. Al momento de validar los resultados con mediciones experimentales, se ha encontrado que el método de elementos finitos realiza predicciones adecuadas [71]. Otro estudio se enfocó en determinar los esfuerzos y deformaciones generados en la interfaz socket y muñón. Estos valores se utilizaron para determinar que parámetros relacionados con el diseño del socket influían más en el confort e integridad del muñón del paciente.
Principales estrategias de control para prótesis de miembro inferior
El estudio buscaba determinar si la presión en la interfaz muñón-socket superaba la presión en el umbral de dolor de la extremidad amputada. Como principal resultado se planteó un nuevo diseño de socket, optimizado mediante análisis informáticos y con un ajuste correcto [72].
Otra utilidad de los elementos finitos es la simulación de la compresión de los tejidos blandos en el muñón del paciente, debido a la compresión generada por el socket. El estudio encargado de esta tarea combinó simulación FE con mediciones experimentales para estimar el módulo de Young del tejido. El estudio permitió determinar con base en la presión del encaje, los cambios en el tejido blando del muñón, la alineación del encaje, la distribución de cargas y la fricción entre el muñón y el encaje [73]. Otros estudios se han centrado en evaluar el desempeño de un dispositivo protésico, mediante el cálculo de cargas en la rodilla de usuarios de prótesis transtibial, durante la ejecución de todo el ciclo de la marcha. Este estudio desarrolló un modelo de elementos finitos en tres dimensiones del muñón del paciente, incluyendo tejidos y huesos internos [29]. El estudio también analizó la influencia de incluir en el análisis las fuerzas inerciales generadas durante la marcha.
El trabajo de [74] se centró en desarrollar para analizar los efectos de las condiciones quasi estáticas en el socket de prótesis transtibial, generadas por las reacciones en el suelo durante la marcha. Las fuerzas de reacción fueron medidas experimentalmente. Para obtener una geometría detallada y realista del muñón y el socket, se usaron datos obtenidos mediante Tomografía Computarizada (TC) del paciente. El trabajo buscaba definir un diseño óptimo de socket, que permitiera una alta integridad estructural y aliviar la presión local en la cabeza del peroné en el muñón. El modelo que mejor resultados mostró fue uno en que se incluyó recubrimiento interno con forma de espiral en el socket logrando una reducción del 65.8% de la presión total. Relacionado con el trabajo anterior, [75] buscaron determinar la biomecánica del deslizamiento del muñón en el socket determinando la influencia de la rigidez del revestimiento interno, mediante el uso de elementos finitos de contacto. Los resultados mostraron que la respuesta biomecánica del deslizamiento del muñón es no lineal aumentando la distancia de deslizamiento del muñón al aumentar la superficie de contacto, en un revestimiento menos rígido. Además, el aumento de la superficie de contacto no garantizó la reducción de la tensión máxima de la interfase.
Centrándonos en prótesis transfemorales, los estudios buscan determinar el valor de presiones máximas generadas en la interfaz de contacto socket-muñón. [76] Determinaron el valor máximo de presión de contacto en el muñón de un usuario de prótesis transfemoral, mediante el uso de un modelo de elementos finitos no lineal, estableciendo que el valor de presión pico es de 80.57 KPa, y se da en el extremo distal del tejido blando en el muñón.
Otra de las aplicaciones de los elementos finitos es el diseño de elementos y mecanismos protésicos. Entre los trabajos que abordan este tema, está el diseño y estudio del pie protésico SACH mediante un modelado 3D por elementos finitos, que permitió el estudio de las cargas de reacción generadas durante la marcha y el rendimiento viscoelástico del mecanismo en el talón [77].
Otro de los estudios que resaltan es el diseño de pies protésicos, por el cual se buscaba combinar el modelado por elementos finitos y el análisis de marcha para calcular la deformación, el estrés y la energía almacenada en el pie a lo largo de la fase de apoyo para distintas velocidades de marcha, esto con el propósito de analizar completamente el desempeño de un pie protésico con almacenamiento de energía [78]. Los elementos finitos también han sido utilizados para mejorar y optimizar diseños de pie protésicos, permitiendo agregar al dispositivo elementos mecánicos como resortes y dampers que permitan modificar las propiedades mecánicas del dispositivo, siendo el caso puntual de la rigidez. El modelado mediante FE permite cuantificar factores, como la modificación de la rigidez rotacional y la energía disipada durante el ciclo de uso [79].
Llevando el diseño de prótesis a un ambiente deportivo, el uso de los FE ha permitido evaluar el desempeño de estos dispositivos para que entreguen el mayor rendimiento al usuario. El trabajo de [80] buscaba determinar el ángulo de curvatura óptimo para el diseño de pies protésicos para deportistas. El estudio también analizó las implicaciones de esta curvatura en la generación de esfuerzos, deformaciones y pandeo de las prótesis. Estos trabajos y demás siempre buscaron establecer el diseño óptimo del pie protésico, teniendo en cuenta diferentes condiciones propias del usuario y del medio en el cual va a desarrollar su marcha [81].
3.8. Principales trabajos
El desarrollo de prótesis de miembro inferior está orientado principalmente a mejorar la calidad de vida de aquellas personas que sufren de una amputación; sin embargo, los avances logrados hasta el momento no alcanzan a satisfacer todos los requerimientos esperados por los usuarios, especialmente hablando en cuanto al confort y la rentabilidad de la prótesis [9]. En [62] desarrollaron un control adaptativo para una prótesis mecatrónica de miembro inferior basado en programación dinámica adaptativa. Cabe recalcar que el control de estos dispositivos normalmente se realiza con base en estados finitos de impedancia (FS-IC), el cual carece de la adaptabilidad a la condición física del usuario. Para desarrollar el control de programación adaptativa, se aplicó programación heurística directa (dHDP) y se evaluó el rendimiento de este en OpenSim (véase Figura 1).
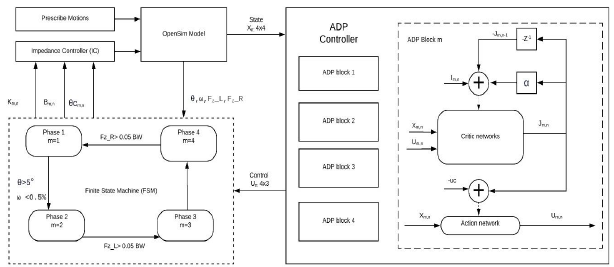
Figura 1
Plataforma de control FS-IC implementada por OpenSim.Se diseña un control ADP para cada fase (m = 1, 2, 3, 4) del FSM proveyendo el respectivo parámetro de impedancia de OpenSIm durante cada ciclo de marcha n.
Mediante ajustes al controlador se logró una tasa de éxito del 87% en las simulaciones realizadas, y la velocidad de aprendizaje se estableció en 215 ciclos de marcha. El esquema del controlador basado en programación dinámica adaptativa se muestra en la Figura 2.
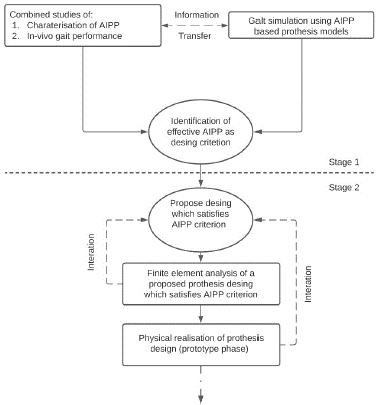
Figura 2
Proceso propuesto para el mapeo del desarrollo e investigación de prótesis. AIPP se define como "Propiedades protésicas independientes del amputado" o las propiedades mecánicas de la prótesis (dureza, amortiguación, geometría que influye en el desempeño dei dispositivo [84].
En [82] desarrollaron una investigación en la que esperaban mejorar el esquema de control de una prótesis mecatrónica activa, que permita la estimación de la fase durante el ciclo de la marcha, en la cual el dispositivo active procesos mecánicos que permita el desarrollo de una marcha lo más cercano a la biomecánica de la marcha humana normal. Para estimar la fase de la marcha, la estrategia de control usa un filtro Kalman extendido (EKF), caracterizado por:
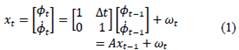
Donde se tiene que ф es la fase de marcha, ф es la velocidad de cambio de la fase, Δt es el paso de tiempo de integración y ωt~N(0, Q). En el cual Q se describe como:

La fase de la marcha calculada mediante el filtro Kalman, es dato de entrada hacia una serie de superficies de control basados en procesos gaussianos (GP), las cuales proporcionan los ángulos de tobillo y rodilla, velocidades y torques deseados. La propuesta de control GP-EKF se comparó con una estrategia de control neuromuscular (NM) y una de control de impedancias (IMP), mostrando los resultados que el control GP-EKF generaba trayectorias del ángulo de la rodilla mucho más cercanas a los datos de personas sin discapacidad.
En [83] se enfocaron en solucionar uno de los principales desafíos en la producción de prótesis de miembro inferior, las cuales deben fabricarse de materiales con alta resistencia y bajo peso. Para esto diseñaron y desarrollaron un elemento estructural en forma de tubo, hecho de material compuesto, con inserciones de fibra de carbón con una matriz y revestimiento interno. Además del diseño del elemento, se desarrolló un modelo de elementos finitos que representa el comportamiento físico real del elemento.
En [84] plantearon un método para la optimización del diseño de prótesis transtibiales, centrado en maximizar los resultados de la rehabilitación y que tenga en cuenta la capacidad neuromotora del individuo en su muñón.
Basado en las investigaciones de los autores del trabajo, se apoya que las consideraciones relacionadas al rendimiento motor del paciente producen predicciones más precisas acerca de los procesos de rehabilitación necesarios para el paciente. El trabajo muestra como resultados los diagramas de los algoritmos de optimización de las prótesis, y resalta que el método presenta una limitación muy grande, la cual recae en el trabajo propio y compromiso del usuario. La siguiente Figura 3 muestra esquemáticamente los algoritmos planteados por los autores.
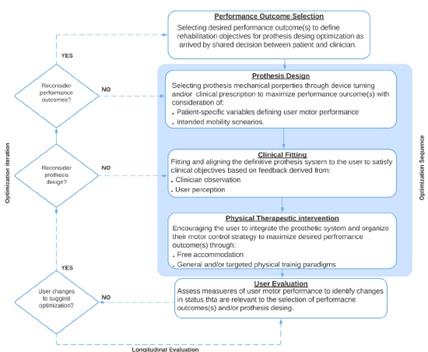
Figura 3
Proceso de optimización propuesto para maximizar el desempeño de prótesis de miembro inferior [84].Technical factors
En [85] presentan una serie de recomendaciones y observaciones para tener en cuenta durante el proceso de diseño y fabricación de prótesis de miembro inferior. La primera de estas recomendaciones se centra en la selección adecuada de materiales y componentes para la prótesis, que permita que se transfiera al dispositivo por lo menos el 40% del peso del cuerpo.
La selección de los materiales y componentes depende del peso y la actividad física que desempeñe el paciente. Se debe tener en cuenta las condiciones y características de la amputación del individuo, así como raspaduras o heridas y afecciones del muñón. Para el diseño y fabricación del socket de la prótesis se debe tener en cuenta que este está dividido en tres partes principales, cada una encargada de diferentes funciones. La parte superior es la cara del asiento, en la parte central se encuentra la zona de control, la cual se encarga de asegurar un movimiento correcto. Finalmente, la zona distal se encarga de soportar únicamente el 10% del peso del individuo, evitando una transferencia de carga inadecuada que dañe los tejidos blandos.
Otra investigación desarrollada a la misma temática buscaba el desarrollo de una interfaz humano- máquina (véase Figura 4) que permitiera el diseño óptimo de prótesis de miembro inferior. Los autores del proyecto encontraron que durante el diseño de los dispositivos protésicos se hacía gran relevancia en los requerimientos mecánicos del dispositivo, pero poca en las características, demandas y aspectos humanos del paciente. Los autores desarrollaron una novedosa metodología de diseño orientada en una interfaz humano-máquina, y la aplicaron en un enfoque en V del diseño de una rodilla mecatrónica activa. En sus resultados la investigación muestra que con base en un análisis de función de calidad (QFD) lograron llegar a diseños de prótesis, que, aunque eran diferentes que las soluciones planteadas actualmente, tenían en cuenta en una alta medida las necesidades del usuario. Los factores humanos tenidos en cuenta en la interfaz de diseño fueron: satisfacción, sensación de seguridad, integración del esquema corporal, soporte, encaje, movilidad y apariencia exterior [86].
Figura 4
Enfoque de diseño de prótesis de miembro inferior, centeada en la relación humano- máquina [86].
La investigación llevada a cabo por [87] se centró en la fabricación e implementación de un simulador de interfaz muñón-socket para prótesis de miembro inferior, que permitiera la reproducción de las cargas y momentos generadas durante la marcha del usuario. El muñón artificial fue fabricado con modelos de hueso revestidos de silicona. Durante la fase de pruebas, se compararon los resultados obtenidos por el simulador y datos de una célula de carga de 6 grados instalada en la prótesis de miembro inferior de un individuo con amputación. Los resultados mostraron durante la fase de empuje una disminución del valor de la comprensión en un 10%, un aumento de la flexión sagital en un 25% y una disminución del esfuerzo cortante antero-posterior de un 34%.
En [88] desarrollaron un sistema que permitía el escaneo, reconstrucción y modelado 3D del paciente con amputación de miembro inferior, el diseño CAD del socket y la fabricación de este mediante técnicas de impresión 3D, permitiendo la creación de un dispositivo adaptado perfectamente a la fisionomía del paciente.
3.9. Futuros avances y enfoques de investigación
Hablando específicamente del proceso de fabricación y producción de sockets y encajes, los futuros avances se centrarán en el control del calor, volumen y salud del muñón mediante la incorporación de tecnologías de detección y monitoreo. También las más recientes investigaciones se están enfocando en la fabricación automatizada de encajes específicos para cada paciente controlando geometría y propiedades mecánicas, usando herramientas de inteligencia artificial como las redes neuronales. La osteointegración también es una práctica que ha tomado fuerza en los años más recientes, cuyos centros de estudio buscan un mayor control y prevención de infecciones, así como la unión de esta técnica de fijación de la prótesis, con técnicas de integración neuromuscular [10].
En el estudio de la marcha humana normal y patológica, se espera que en años futuros se desarrollen mayores investigaciones centradas en los patrones de marcha que se alejen del comportamiento medio estándar [9]. Esto con el objetivo, que las prótesis de miembro inferior puedan adaptarse a las necesidades específicas del paciente.
Los avances en las estrategias de control basados en inteligencia artificial son el desarrollo de algoritmos y programas que relacionan directamente los estímulos enviados a los músculos con el movimiento de la pierna humana. También esfuerzos se están enfocando en un control más preciso de las prótesis, que permita un seguimiento en tiempo real, y una marcha asimétrica [9]. Finalmente, se necesita el desarrollo de dispositivos más eficientes y rentables para que se aumente la adquisición y el uso de prótesis entre la comunidad con amputación de miembro inferior [9].
4. Conclusiones
El objetivo fundamental de la investigación en biomecánica de interfaces protésicas es lograr una función óptima y no simplemente adecuada. Hasta la fecha, incluso los análisis científicos más rigurosos se han centrado en gran medida en diseños de enchufes basados en su uso histórico y en su adecuación clínica comprobada. La instrumentación y la modelización por ordenador han sido útiles para iluminar lo que antes sólo eran condiciones implícitas dentro de los enchufes protésicos. Sin embargo, los avances más recientes en la comprensión de las tensiones experimentadas en la interfaz miembro/prótesis aún no han alterado fundamentalmente la práctica clínica. Es cada vez más necesario que los profesionales de la salud se adapten a nuevos diseños y materiales de prótesis que no cuentan con una larga historia de aplicaciones exitosas. Por ejemplo, el uso de nuevos materiales como revestimientos elastoméricos y enchufes termoplásticos flexibles, altera necesariamente la forma en que se transfiere la carga del miembro a la prótesis. Una mejor comprensión de las tensiones en la interfaz protésica nos permite entender el efecto biomecánico de estas nuevas interfaces y puede ayudar a los protesistas a ajustar sus diseños de enchufes para aprovechar al máximo las propiedades de las nuevas tecnologías [89].
Para todos los diseños de enchufes protésicos, la distribución óptima de la carga debe ser proporcional a la capacidad del cuerpo para soportar tales tensiones, sin cruzar los umbrales de dolor o daño en la piel. Se necesita más investigación para obtener datos cuantitativos suficientes que documenten completamente estas propiedades umbrales de los tejidos y su dependencia de la edad y las patologías. Sin una comprensión rigurosa de estas propiedades de los tejidos, sería inútil discutir la distribución óptima de la carga y cómo lograrla mediante diversos diseños de enchufes protésicos [90].
La tecnología CAD/CAM para el enchufe protésico puede hacer que el proceso de diseño y fabricación del enchufe sea más efectivo y objetivo. Sin embargo, los sistemas CAD/CAM actuales no pueden ofrecer sugerencias expertas sobre cómo hacer un diseño de enchufe óptimo. La mejora adicional de los sistemas debería incorporar la calificación y la visualización de la interacción entre el muñón residual y el enchufe protésico. La modelización computacional con mejoras adicionales puede ser una herramienta útil para este propósito. Si la investigación puede acumular suficiente información sobre la relación entre los valores cuantificados y la comodidad de la prótesis, los sistemas CAD/CAM pueden desarrollarse aún más en sistemas expertos que propongan una configuración óptima del enchufe [89].
El desarrollo más radical en prótesis es, sin duda, la fijación esquelética directa de las prótesis de miembro a través de implantes osteointegrados. Este método elimina completamente la necesidad del enchufe protésico, a través de fijaciones de titanio percutáneas que transfieren la carga directamente al hueso esquelético. Aunque pueda parecer que la osteointegración anula cualquier discusión sobre las interfaces protésicas, incluso este avance radical en el estado del arte sólo cambia la ubicación y el tipo del problema de interfaz. Surgen nuevos desafíos en las interfaces metal/hueso y metal/piel. La última conexión es de particular importancia porque debe proporcionar artificialmente la barrera cutánea crítica ante el entorno. Las respuestas de los tejidos blandos a las tensiones anormales en el punto de fijación están relacionadas en cierta medida con la mecánica de la interfaz estudiada anteriormente [90].
La biomecánica protésica es una de las áreas más desafiantes en el campo de la biomecánica. No hay duda de que una mejor comprensión biomecánica ha avanzado en la ciencia del ajuste del enchufe. Sin embargo, los avances más recientes en la comprensión de las tensiones experimentadas en el muñón residual aún no han llevado a un consenso clínico suficiente que pueda alterar fundamentalmente la práctica clínica. Deben realizarse esfuerzos para identificar sistemáticamente las principales discrepancias. Se debe dirigir una investigación adicional para abordar las controversias críticas y los desafíos técnicos asociados. Con estos objetivos, esperamos que este artículo de revisión pueda ofrecer alguna contribución [91].
Varios diseños de prótesis controlados por microprocesador ofrecen acomodación para diferentes características de la marcha. Es importante que el dispositivo tenga la capacidad de ofrecer cambios funcionales en tiempo real en el ángulo de la articulación protésica y la resistencia o actuación, ya que cada paso puede ser significativamente diferente al anterior. Factores que deben considerarse incluyen la capacidad del dispositivo para adaptarse a factores ambientales (fuerza, velocidad y terreno), ofrecer actuación con alimentación en fase de apoyo y fase de balanceo, tener efectos cosméticos dinámicos y ofrecer un método de entrada de control adecuado para el usuario [89], [90].
A medida que sigan surgiendo nuevos productos que exhiban diferentes características de las prótesis de miembro inferior controladas por computadora, se obtendrá una mayor comprensión de cómo mejorar la próxima generación de prótesis. Con el continuo desarrollo de productos, se presentan vastos cambios en la forma en que se ven y utilizan estos sistemas [91].
Referencias
M. Windrich, M. Grimmer, O. Christ, S. Rinderknecht, P. Beckerle, "Active lower limb prosthetics: A systematic review of design issues and solutions," Bio Medical Engineering Online, vol. 15. 2016, doi: https://doi.org/10.1186/s12938-016-0284-9
C. Tudor-Locke and D. R. Bassett Jr, "How many steps/day are enough? Preliminary pedometer indices for public health," Sports Medicine, vol. 34, no. 1, pp. 1-8, 2004.
J. C. Gómez Beltrán, "Identificación de las personas con discapacidad en los territorios desde el rediseño del registro," Dane: Información para Todos. Accessed: Jun. 20, 2023. [Online]. Available: Available: https://www.dane.gov.co/files/investigaciones/discapacidad/identificacion%20en%20los%20territorios.pdf
C. Quintero Quiroz, A. Jaramillo Zapata, M. T. De Ossa Jiménez, P. A. Villegas Bolaños, "Estudio descriptivo de condiciones del muñón en personas usuarias de prótesis de miembros inferiores," [Online]. Available: https://revistacmfr.org/index.php/rcmfr/article/view/141
NASDAB (National Amputee Statistical Database), "The Amputee statistical database for the United Kingdom 2006/07," BibSonomy. 2009.
Presidencia de la República de Colombia, "Estadísticas de Asistencia Integral a las Víctimas de MAP y MUSE," Acción contra minas. [Online]. Available: http://www.accioncontraminas.gov.co/Estadisticas/estad isticas-de-victimas
N. L. Dudek, M. B. Marks, S. C. Marshall, J. P. Chardon, "Dermatologic conditions associated with use of a lower-extremity prosthesis," Arch Phys Med Rehabil, vol. 86, no. 4, pp. 659-663, 2005, doi: https://doi.org/10.1016/j.apmr.2004.09.003
F. Martínez, A. Olmos, J. M. Rodríguez, A. Claudio, S. Vergara, B. M. González, "Propuesta de estrategia de control para prótesis transfemorales inteligentes," in Memorias delXVICongreso Latinoamericano de Control Automático, CLCA 2014, Cancún: CLCA, 2014.
M. Asif et al., "Advancements, Trends and Future Prospects of Lower Limb Prosthesis," IEEE Access, vol. 9, pp. 85956 - 85977, 2021, doi: https://doi.org/10.1109/ACCESS.2021.3086807
R. Safari, "Lower limb prosthetic interfaces: Clinical and technological advancement and potential future direction," Prosthet Orthot Int, vol. 44, no. 6, pp. 384 - 401, 2020, doi: https://doi.org/10.1177/0309364620969226
H. Meulenbelt, J. Geertzen, M. Jonkman, P. Dijkstra, "Skin Problems of the Stump in Lower Limb Amputees: 1. A Clinical Study," Acta Dermato Venereologica, vol. 91, no. 2, pp. 173-177, 2011, doi: https://doi.org/10.2340/00015555-1040
N. L. Dudek, M. B. Marks, S. C. Marshall, "Skin Problems in an Amputee Clinic," Am J Phys Med Rehabil, vol. 85, no. 5, pp. 424 - 429, 2006, doi: https://doi.org/10.1097/01.phm.0000214272.01147.5a
K. Hachisuka, T. Nakamura, S. Ohmine, H. Shitama, K. Shinkoda, "Hygiene problems of residual limb and silicone liners in transtibial amputees wearing the total surface bearing socket," Arch Phys Med Rehabil, vol. 82, no. 9, pp. 1286 - 1290, 2001, doi: https://doi.org/10.1053/apmr.2001.25154
M. J. Hall, D. G. Shurr, M. J. VanBeek, M. B. Zimmerman, "The Prevalence of Dermatological Problems for Transtibial Amputees Using a Roll-on Liner," JPO Journal of Prosthetics and Orthotics, vol. 20, no. 4, pp. 134 - 139, Oct. 2008, doi: https://doi.org/10.1097/JPO.0b013e31818ad38a
T. R. Dillingham, L. E. Pezzin, E. J. MacKenzie, A. R. Burgess, "Use and Satisfaction with Prosthetic Devices Among Persons with Trauma-Related Amputations," Am J Phys Med Rehabil, vol. 80, no. 8, pp. 563 - 571, 2001, doi: https://doi.org/10.1097/00002060-200108000-00003
H. E. Meulenbelt, J. H. Geertzen, M. F. Jonkman, P. U. Dijkstra, "Determinants of Skin Problems of the Stump in Lower-Limb Amputees," Arch Phys Med Rehabil, vol. 90, no. 1, pp. 74 - 81, 2009, doi: https://doi.org/10.1016/j.apmr.2008.07.015
K. Ghoseiri, M. R. Safari, "Prevalence of heat and perspiration discomfort inside prostheses: Literature review," J Rehabil Res Dev, vol. 51, no. 6, pp. 855-868, 2014, doi: https://doi.org/10.1682/JRRD.2013.06.0133
C. Quintero Quiroz, V. Z. Pérez, "Materials for lower limb prosthetic and orthotic interfaces and sockets: Evolution and associated skin problems," Revista Facultad de Medicina, vol. 67, no. 1, pp. 117-126, 2019. doi: https://doi.org/10.15446/revfacmed.v67n1.64470
C. E. Roffman, J. Buchanan, and G. T. Allison, "Predictors of non-use of prostheses by people with lower limb amputation after discharge from rehabilitation: development and validation of clinical prediction rules," J Physiother, vol. 60, no. 4, pp. 224231, 2014, doi: https://doi.org/10.1016/j.jphys.2014.09.003
D. Durmus et al., "The relationship between prosthesis use, phantom pain and psychiatric symptoms in male traumatic limb amputees," Compr Psychiatry, vol. 59, pp. 45-53, 2015, doi: https://doi.org/10.1016/j.comppsych.2014.10.018
G. E. Reiber et al., "Servicemembers and veterans with major traumatic limb loss from Vietnam war and OIF/OEF conflicts: Survey methods, participants, and summary findings," The Journal of Rehabilitation Research and Development, vol. 47, no. 4, p. 275, 2010, doi: https://doi.org/10.1682/JRRD.2010.01.0009
R. L. O. Ramos, A. D. Baryolo Cardoso, "Rehabilitación del Amputado de Miembro Inferior," Medicina de Rehabilitación Cubana, 2023. [Online]. Available: http://www.sld.cu/sitios/rehabilitacion/
J. E. Zamudio Palacios et al., "Modelo dinámico de una prótesis transtibial para ciclistas paralímpicos," in IICongreso Internacional en Inteligencia Ambiental, Ingeniería de Software y Salud Electrónica y Móvil -AmITIC, 2018, pp. 151-157. [Online]. Available: https://revistas.utp.ac.pa/index.php/memoutp/article/view/1849
F. Martínez, A. Olmos, J. M. Rodríguez, A. Claudio, S. Vergara, and B. M. González, "Propuesta de estrategia de control para prótesis transfemorales inteligentes," in XVICongreso Latinoamericano de Control Automático, CLCA, Cancún, Oct. 2014. [Online]. Available: https://amca.mx/memorias/amca2014/media/files/0201.pdf
C. Quintero-Quiroz, V. Z. Pérez, "Materials for lower limb prosthetic and orthotic interfaces and sockets: Evolution and associated skin problems," Revista Facultad de Medicina, vol. 67, no. 1, pp. 117-126, 2019, doi: https://doi.org/10.15446/revfacmed.v67n1.64470
P. K. Kumar, M. Charan, S. Kanagaraj, "Trends and Challenges in Lower Limb Prosthesis," IEEE Potentials, vol. 36, no. 1, pp. 19-23, 2017, doi: https://doi.org/10.1109/MPOT.2016.2614756
JD Hsu, JW Michael, and JR Fisk, AAOS Atlas of Orthoses and Assistive Devices, Fourth Edition. Mosby Elsevier, 2008.
S. L. Phillips, W. Craelius, "Material properties of selected prosthetic laminates, " Journal of Prosthetics and Orthotics, vol. 17, no. 1, pp. 27-34, 2005, doi: https://doi.org/10.1097/00008526-200501000-00007
X. Jia, M. Zhang, W. C. C. Lee, "Load transfer mechanics between trans-tibial prosthetic socket and residual limb-dynamic effects," J Biomech, vol. 37, no. 9, pp. 1371-1377, 2004, doi: https://doi.org/10.1016/j.jbiomech.2003.12.024
G. K. Klute, B. C. Glaister, J. S. Berge, "Prosthetic Liners for Lower Limb Amputees," Prosthet Orthot Int, vol. 34, no. 2, pp. 146-153, 2010, doi: https://doi.org/10.3109/03093641003645528
J. Z. Laferrier, R. Gailey, "Advances in Lower-limb Prosthetic Technology," Phys Med Rehabil Clin N Am, vol. 21, no. 1, pp. 87-110, 2010, doi: https://doi.org/10.1016/j.pmr.2009.08.003
S. Arun, S. Kanagaraj, "Performance enhancement of epoxy based sandwich composites using multiwalled carbon nanotubes for the application of sockets in trans-femoral amputees," J Mech Behav Biomed Mater, vol. 59, pp. 1-10, 2016, doi: https://doi.org/10.1016/j.jmbbm.2015.12.013
M.-S. Scholz et al., "The use of composite materials in modern orthopaedic medicine and prosthetic devices: A review," Compos Sci Technol, vol. 71, no. 16, pp. 1791 - 1803, 2011, doi: https://doi.org/10.1016/j.compscitech.2011.08.017
Å. Bartonek, M. Eriksson, E. M. Gutierrez-Farewik, "A new carbon fibre spring orthosis for children with plantarflexor weakness," Gait Posture, vol. 25, no. 4, pp. 652-656, Apr. 2007, doi: https://doi.org/10.1016/j.gaitpost.2006.07.013
D. Datta, S. K. Vaidya, J. Howitt, L. Gopalan, "Outcome of fitting an ICEROSS prosthesis," Prosthet Orthot Int, vol. 20, no. 2, pp. 111-115, 1996, doi: https://doi.org/10.3109/03093649609164427
C. Comotti, D. Regazzoni, C. Rizzi, A. Vitali, "Multi-material design and 3D printing method of lower limb prosthetic sockets," in ACMInternational Conference Proceeding Series, Association for Computing Machinery, Oct. 2015, pp. 42-45, doi: https://doi.org/10.1145/2838944.2838955
R. Miclaus, A. Repanovici, and N. Roman, "Biomaterials: Polylactic acid and 3D printing processes for orthosis and prosthesis," Materiale Plastice, vol. 54, no. 1, pp. 98-102, 2017, doi: https://doi.org/10.37358/mp.17.1.4794
K.-T. Nguyen, L. Benabou, and S. Alfayad, "Systematic Review of Prosthetic Socket Fabrication using 3D printing," in Proceedings of the20184thInternational Conference on Mechatronics and Robotics Engineering, 2018, pp. 137-141, doi: https://doi.org/10.1145/3191477.3191506
L. Paterno, M. Ibrahimi, E. Gruppioni, A. Menciassi, L. Ricotti, "Sockets for Limb Prostheses: A Review of Existing Technologies and Open Challenges," IEEE Trans Biomed Eng, vol. 65, no. 9, pp. 1996-2010, 2018, doi: https://doi.org/10.1109/TBME.2017.2775100
Z. Tao, H.-J. Ahn, C. Lian, K.-H. Lee, C.-H. Lee, "Design and optimization of prosthetic foot by using polylactic acid 3D printing," Journal of Mechanical Science and Technology, vol. 31, no. 5, pp. 2393-2398, 2017, doi: https://doi.org/10.1007/s12206-017-0436-2
P. M. Stevens, R. R. DePalma, S. R. Wurdeman, "Transtibial Socket Design, Interface, and Suspension: A Clinical Practice Guideline," JPO Journal of Prosthetics and Orthotics, vol. 31, no. 3, pp. 172-178, Jul. 2019, doi: https://doi.org/10.1097/JPO.0000000000000219
A. Staros, "The SACH (Solid-Ankle Cushion-Heel) Foot," Orthotics and Prosthetics, vol. 11, no. 2, pp. 23-31, 1957.
Blatchford, "Orion3." [Online]. Available: https://www.blatchfordmobility.com/en-gb/products/knees/orion3
Steeper Group, "Prosthetic Knees Freedom Plie 3." 2023. [Online]. Available: https://www.steepergroup.com/prosthetics/lower-limb-prosthetics/knees/plie-3/
Ottobock, "Genium." [Online]. Available: https://shop.ottobock.us/Prosthetics/Lower-Limb-Prosthetics/Knees---Microprocessor/Genium/Genium/p/3B 1 -3#product-specification-section
Össur, "RHEO KNEE." [Online]. Available: https://www.ossur.com/en-us/prosthetics/knees/rheo-knee
H. M. Herr, A. M. Grabowski, "Bionic ankle-foot prosthesis normalizes walking gait for persons with leg amputation," Proceedings of the Royal Society B: Biological Sciences, vol. 279, no. 1728, pp. 457-464, 2012, doi: https://doi.org/10.1098/rspb.2011.1194
Össur, "Power Knee." [Online]. Available: https://www.ossur.com/en-us/prosthetics/knees/power-knee
T. Chin et al., "Successful prosthetic fitting of elderly trans-femoral amputees with Intelligent Prosthesis (IP)," Prosthet Orthot Int, vol. 31, no. 3, pp. 271-276, Sep. 2007, doi: https://doi.org/10.1080/03093640601040152
D. Datta, J. Howitt, "Conventional versus microchip controlled pneumatic swing phase control for trans-femoral amputees," Prosthet Orthot Int, vol. 22, no. 2, pp. 129-135, 1998, doi: https://doi.org/10.3109/03093649809164474
M. Bellmann, T. Schmalz, S. Blumentritt, "Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints," Arch Phys Med Rehabil, vol. 91, no. 4, pp. 644-652, Apr. 2010, doi: https://doi.org/10.1016/j.apmr.2009.12.014
D. C. Toledo-Pérez, M. A. Martínez-Prado, R. A. Gómez-Loenzo, W. J. Paredes-García, J. Rodríguez-Reséndiz, "A study of movement classification of the lower limb based on up to 4-EMG channels," Electronics (Switzerland), vol. 8, no. 3, Mar. 2019, doi: https://doi.org/10.3390/electronics8030259
K. Yuan, J. Zhu, Q. Wang, L. Wang, "Finite-state control of powered below-knee prosthesis with ankle and toe," in IFAC Proceedings Volumes (IFAC-PapersOnline), 2011, pp. 2865-2870, doi: https://doi.org/10.3182/20110828-6-IT-1002.03064
S. K. Au, H. Herr, J. Weber, and E. C. Martinez-Villalpando, "Powered Ankle-Foot Prosthesis for the Improvement of Amputee Ambulation," in 2007 29thAnnual International Conference of the IEEE Engineering in Medicine and Biology Society, 2007, pp. 3020-3026, doi: https://doi.org/10.1109/IEMBS.2007.4352965
B. E. Lawson, B. Ruhe, A. Shultz, M. Goldfarb, "A Powered Prosthetic Intervention for Bilateral Transfemoral Amputees," IEEE Trans Biomed Eng, vol. 62, no. 4, pp. 1042-1050, 2015, doi: https://doi.org/10.1109/TBME.2014.2334616
N. P. Fey, A. M. Simon, A. J. Young, L. J. Hargrove, "Controlling Knee Swing Initiation and Ankle Plantarflexion With an Active Prosthesis on Level and Inclined Surfaces at Variable Walking Speeds," IEEE J Transl Eng Health Med, vol. 2, pp. 1 -12, 2014, doi: https://doi.org/10.1109/JTEHM.2014.2343228
R. D. Gregg, T. Lenzi, L. J. Hargrove, J. W. Sensinger, "Virtual Constraint Control of a Powered Prosthetic Leg: From Simulation to Experiments With Transfemoral Amputees," IEEE Transactions on Robotics, vol. 30, no. 6, pp. 1455-1471, 2014, doi: https://doi.org/10.1109/TRO.2014.2361937
N. Anil Kumar, W. Hong, and P. Hur, Impedance Control of a Transfemoral Prosthesis using Continuously Varying Ankle Impedances and Multiple Equilibria. 2019.
K. Yuan, Q. Wang, J. Zhu, L. Wang, "A Hierarchical Control Scheme for Smooth Transitions between Level Ground and Ramps with a Robotic Transtibial Prosthesis," IFAC Proceedings Volumes, vol. 47, no. 3, pp. 3527-3532, 2014, doi: https://doi.org/10.3182/20140824-6-ZA-1003.02667
R. F. Campos, J. B. Machado, S. Givigi, and L. H. de C. Ferreira, "Control of a Mechanical Knee Based on Predictive Control Techniques," in 2019IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), 2019, pp. 1-4, doi: https://doi.org/10.1109/CCECE.2019.8861754
P. Yang, X. Lu, J. Sun, "Disturbance Observer Based Fast Terminal Sliding Mode Control for Lower Limb Prosthesis," in 201925thInternational Conference on Automation and Computing (ICAC), 2019, pp. 1-6, doi: https://doi.org/10.23919/IConAC.2019.8895225
Y. Wen, J. Si, X. Gao, S. Huang, H. H. Huang, "A New Powered Lower Limb Prosthesis Control Framework Based on Adaptive Dynamic Programming," IEEE Trans Neural Netw Learn Syst, vol. 28, no. 9, pp. 2215-2220, 2017, doi: https://doi.org/10.1109/TNNLS.2016.2584559
R. Gupta, R. Agarwal, "Single channel EMG-based continuous terrain identification with simple classifier for lower limb prosthesis," Biocybern Biomed Eng, vol. 39, no. 3, pp. 775-788, 2019, doi: https://doi.org/10.1016/j.bbe.2019.07.002
M. J. Highsmith et al., "Prosthetic interventions for people with transtibial amputation: Systematic review and meta-analysis of high-quality prospective literature and systematic reviews," J Rehabil Res Dev, vol. 53, no. 2, pp. 157-184, 2016, doi: https://doi.org/10.1682/JRRD.2015.03.0046
R. Caldwell, S. Fatone, "Technique modifications for a suction suspension version of the Northwestern University Flexible Sub-Ischial Vacuum socket," Prosthet Orthot Int, vol. 43, no. 2, pp. 233-239, 2019, doi: https://doi.org/10.1177/0309364618798869
S. Fatone, R. Caldwell, "Northwestern University Flexible Subischial Vacuum Socket for persons with transfemoral amputation," Prosthet Orthot Int, vol. 41, no. 3, pp. 246-250, 2017, doi: https://doi.org/10.1177/0309364616685230
S. Fatone, R. Caldwell, "Northwestern University Flexible Subischial Vacuum Socket for persons with transfemoral amputation-Part 1," Prosthet Orthot Int, vol. 41, no. 3, pp. 237-245, 2017, doi: https://doi.org/10.1177/0309364616685229
C. E. Fillauer, C. H. Pritham, K. D. Fillauer, "Evolution and Development of the Silicone Suction Socket (3S) for Below-Knee Prostheses," JPO Journal of Prosthetics and Orthotics, vol. 1, no. 2, pp. 92-103, Jan. 1989, doi: https://doi.org/10.1097/00008526-198901000-00007
R. G. Redhead, "Total surface bearing self suspending above-knee sockets/1," Prosthet Orthot Int, vol. 3, no. 3, pp. 126-136, 1979, doi: https://doi.org/10.3109/03093647909103096
J. J. Singh, J. S. Mehta, R. Kumar, and G. Sapra, "FEA simulations of Lower Limb Prosthetics," IOP Conf Ser Mater Sci Eng, vol. 1225, no. 1, p. 012030, 2022, doi: https://doi.org/10.1088/1757-899x/1225/1/012030
J. C. H. Goh, P. V. S. Lee, S. L. Toh, C. K. Ooi, "Development of an integrated CAD-FEA process for below-knee prosthetic sockets," Clinical Biomechanics, vol. 20, no. 6, pp. 623-629, 2005, doi: https://doi.org/10.1016/j.clinbiomech.2005.02.005
W. C. C. Lee, M. Zhang, "Using computational simulation to aid in the prediction of socket fit: A preliminary study," Med Eng Phys, vol. 29, no. 8, pp. 923-929, 2007, doi: https://doi.org/10.1016/j.medengphy.2006.09.008
D. P. Reynolds and M. Lord, "Interface load analysis for computer-aided design of below-knee prosthetic sockets," Med Biol Eng Comput, vol. 30, no. 4, pp. 419 - 426, 1992, doi: https://doi.org/10.1007/BF02446180
M. C. Faustini, R. R. Neptune, R. H. Crawford, "The quasi-static response of compliant prosthetic sockets for transtibial amputees using finite element methods," Med Eng Phys, vol. 28, no. 2, pp. 114-121, 2006, doi: https://doi.org/10.1016/j.medengphy.2005.04.019
C. C. Lin, C.-H. Chang, C.-L. Wu, K.-C. Chung, I. C. Liao, "Effects of liner stiffness for trans-tibial prosthesis: a finite element contact model," Med Eng Phys, vol. 26, no. 1, pp. 1 -9, 2004, doi: https://doi.org/10.1016/S1350-4533(03)00127-9
Linlin Zhang, Ming Zhu, Ling Shen, and Feng Zheng, "Finite element analysis of the contact interface between trans-femoral stump and prosthetic socket," in 201335th AnnualInternational Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2013, pp. 1270-1273. doi: https://doi.org/10.1109/EMBC.2013.6609739
M. M. Saunders et al., "Finite Element Analysis as a Tool for Parametric Prosthetic Foot Design and Evaluation. Technique Development in the Solid Ankle Cushioned Heel (SACH) Foot," Comput Methods Biomech Biomed Engin, vol. 6, no. 1, pp. 75-87, 2003, doi: https://doi.org/10.1080/1025584021000048974
X. Bonnet, H. Pillet, P. Fodé, F. Lavaste, W. Skalli, "Finite element modelling of an energy-storing prosthetic foot during the stance phase of transtibial amputee gait," Proc InstMech Eng H, vol. 226, no. 1, pp. 70-75, 2012, doi: https://doi.org/10.1177/0954411911429534
H. Tryggvason, F. Starker, C. Lecomte, F. Jonsdottir, "Use of dynamic FEA for design modification and energy analysis of a variable stiffness prosthetic foot," Applied Sciences (Switzerland), vol. 10, no. 2, 2020, doi: https://doi.org/10.3390/app10020650
M. J. Ke et al., "Influence of three different curvatures flex-foot prosthesis while single-leg standing or running: A finite element analysis study," J Mech Med Biol, vol. 17, no. 3, 2017, doi: https://doi.org/10.1142/S0219519417500555
P. Mahmoodi, S. Aristodemou, R. Ransing, N. Owen, M. Friswell, "Prosthetic foot design optimisation based on roll-over shape and ground reaction force characteristics," Proc Inst Mech Eng C J Mech Eng Sci, vol. 231, no. 17, pp. 3093-3103, 2017, doi: https://doi.org/10.1177/0954406216643110
N. Thatte, T. Shah, H. Geyer, "Robust and adaptive lower limb prosthesis stance control via extended kalman filter-based gait phase estimation," IEEE Robot Autom Lett, vol. 4, no. 4, pp. 3129-3136, Oct. 2019, doi: https://doi.org/10.1109/LRA.2019.2924841
M. B. Francisco, D. M. Junqueira, G. A. Oliver, J. L. J. Pereira, S. S. da Cunha, G. F. Gomes, "Design optimizations of carbon fibre reinforced polymer isogrid lower limb prosthesis using particle swarm optimization and Lichtenberg algorithm," Engineering Optimization vol. 53, no. 11, pp. 1922-1945, 2021, doi: https://doi.org/10.1080/0305215X.2020.1839442
M. J. Major, N. P. Fey, "Considering passive mechanical properties and patient user motor performance in lower limb prosthesis design optimization to enhance rehabilitation outcomes," Physical Therapy Reviews, vol. 22, no. 3-4, pp. 202-216, 2017, doi: https://doi.org/10.1080/10833196.2017.1346033
V. Rajt'úková, M. Michalíková, L. Bednarcíková, A. Balogová, J. Zivcák, "Biomechanics of lower limb prostheses," in Procedia Engineering, 2014, pp. 382391, doi: https://doi.org/10.1016/j.proeng.2014.12.107
P. Beckerle, O. Christ , T. Schürmann, J. Vogt, O. von Stryk, S. Rinderknecht , "A human-machine-centered design method for (powered) lower limb prosthetics," Rob Auton Syst, vol. 95, pp. 1-12, 2017, doi: https://doi.org/10.1016/j.robot.2017.05.004
M. P. McGrath et al., "Development of a residuum/socket interface simulator for lower limb prosthetics," Proc Inst Mech Eng H, vol. 231, no. 3, pp. 235-242, 2017, doi: https://doi.org/10.1177/0954411917690764
C. Comotti, D. Regazzoni, C. Rizzi, and A. Vitali, "Multi-material design and 3D printing method of lower limb prosthetic sockets," in ACMInternational Conference Proceeding Series, Association for Computing Machinery, 2015, pp. 42-45. doi: https://doi.org/10.1145/2838944.2838955
A. F. T. Mak, M. Zhang, and D. A. Boone, "State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: A review," J Rehabil Res Dev., vol.38, no. 2, pp.161-74, 2001.
J. Martin, A. Pollock, J. Hettinger, "Microprocessor Lower Limb Prosthetics: Review of Current State of the Art," JPO Journal of Prosthetics and Orthotics, vol. 22, no. 33, 2010, doi: https://doi.org/10.1097/JPO.0b013e3181e8fe8a
M. Wang, Q. Nong, Y. Liu, H. Yu, "Design of lower limb prosthetic sockets: a review," Expert Rev Med Devices, vol. 19, no. 1, pp. 63-73, 2022, doi: https://doi.org/10.1080/17434440.2022.2020094
Como citar:
Financiación
Contribución de los autores
Declaración de la Junta de Revisión Institucional
Declaración de consentimiento informado
Author notes
ajersonmaldonado@ustavillavicencio.edu.cobbjaviermartinez@ustavillavo.edu.cocyequinbeltran@ustavillavo.edu.codivanriveros@ustavillavo.edu.coegermantovar@ustavillavo.edu.co
Conflict of interest declaration
