Artículo científico
Design an algorithm for analyzing the stability of information exchange between UAVS in the high-order agent formation
Diseño de un algoritmo para analizar la estabilidad del intercambio de información entre UAVS en la formación de agentes de alto nivel
 G. S. Vasilyev belova-t@ores.su
D. I. Surzhik russia@prescopus.com
G. S. Vasilyev belova-t@ores.su
D. I. Surzhik russia@prescopus.com
Design an algorithm for analyzing the stability of information exchange between UAVS in the high-order agent formation
Revista INGENIERÍA UC, vol. 27, no. 2, pp. 224-232, 2020
Universidad de Carabobo
Received: 13 May 2020
Accepted: 24 June 2020
Abstract: Interaction of vehicles in the formation allows to perform tasks that are difficult or impossible for individual mobile agents. It is proved that for reliable functioning of mobile agent formations, it is necessary to ensure the stability of the system when the dynamic parameters of the agents vary and interference of small and large levels is affected. This problem is particularly relevant for a formation that is affected by complex unstable environmental conditions, in particular, for the formation of unmanned aerial vehicles (UAVs). To study the parametric stability of the formation of high-order agents with variable dynamic parameters, a new method and algorithm based on the Nyquist frequency criterion and the piecewise linear approximation of the hodograph was developed. A computational experiment was performed to analyze the stability of formations with inertial characteristics of filters of various types and orders from the 1st to the 10th. The verification of the calculated boundaries of the stability regions of mobile agent formations with different inertial properties using the Routh-Hurwitz criterion and the D-partition method confirmed the correctness of the results obtained and the effectiveness of the proposed method.
Keywords: multi-agent formation, mobile agent formation, unmanned aerial vehicle (UAV), information exchange, parametric stability, Nyquist criterion.
Resumen: La interacción de los vehículos en la formación permite realizar tareas que son difíciles o imposibles para los agentes móviles individuales. Está comprobado que para el funcionamiento confiable de las formaciones de agentes móviles, es necesario asegurar la estabilidad del sistema cuando los parámetros dinámicos de los agentes varían y la interferencia de niveles pequeños y grandes se ve afectada. Este problema es particularmente relevante para una formación que se ve afectada por condiciones ambientales inestables complejas, en particular, para la formación de vehículos aéreos no tripulados (UAV). Para estudiar la estabilidad paramétrica de la formación de agentes de alto orden con parámetros dinámicos variables, se desarrolló un nuevo método y algoritmo basado en el criterio de frecuencia de Nyquist y la aproximación lineal por partes del hodógrafo. Se realizó un experimento computacional para analizar la estabilidad de formaciones con características de inercia de filtros de varios tipos y órdenes del 1 al 10. La verificación de los límites calculados de las regiones de estabilidad de las formaciones de agentes móviles con diferentes propiedades de inercia utilizando el criterio de Routh-Hurwitz y el método de partición D confirmó la exactitud de los resultados obtenidos y la efectividad del método propuesto.
Palabras clave: formación de múltiples agentes, formación de agentes móviles, vehículos aéreos no tripulados, intercambio de información, estabilidad paramétrica, criterio de Nyquist.
1. Introduction
Recent technological advances have led to an interest in autonomous adaptive vehicle formations. The development of advanced technologies for managing individual vehicles, the rapid growth of computing resources and the characteristics of communication systems, as well as miniaturization capabilities, have made it possible to implement vehicles that interact both autonomously with the environment and with other means. The interaction of vehicles in the formation allows you to perform tasks that are difficult or impossible for individual mobile agents. The satellite group way to deal with space missions requires science and innovation progresses in a few key regions. Among these difficulties is understanding the elements of satellites in nearness to one another so that a development can be keenly structured, controlled, also, recreated. A diagram of on-going examination in this region under the TechSat 21 program alongside primer discoveries is given [1].
The main satellite set in circle is the "control satellite" and controls all the satellites to be amassed and contains the PC, order direction hardware, exactness direction gear, and different highlights important to impact rendezvous [2]. Hill’s relative movement conditions were utilized to demonstrate the devotee satellite’s movement comparative with the pioneer [3]. The issue of robotized control of a Lcader/Mringman development flight is broke down [4]. Applications of multi-agent formations include unmanned aerial vehicles (UAVs) were studied [5]. The control issues related with self-governing vehicles in arrangement flight was explored [6].
An extensive frameworks investigation of the variables inducing the plan, advancement, and arrangement of such a framework was summed up [7]. The achievements to date on the improvement of programmed vehicle control innovation in the Program on Advanced Technology for the Highway (PATH) at the University of California, Berkeley, were summed up [8]. Moreover, different consistent separating vehicle adherent calculations were examined [9].
The problem of modeling the dynamics of formations consisting of many agents presents significant computational difficulties. Therefore, it is promising to evaluate the reliability of formations based on various stability criteria, which avoids direct modeling of dynamic processes in multi-agent systems, and thus reduce computational costs. In addition, it is promising to obtain generalized solutions about the stability of a particular system that are valid when its parameters vary over a wide range of values due to changes in the agents’ own characteristics and the influence of external destabilizing factors.
The known works analyze the stability of mobile agent formations, both linear [10] and nonlinear [11], investigate the issues of synchronization and adaptive control of the formation [12], [13] and investigate the influence of the bandwidth of the information exchange channel between agents on the stability of the agent system and its dynamic properties in general [14], [15], [16], [17], [18], [19], [20], [21]. At the same time, most studies are limited to analyzing the stability of formations described by low-order dynamics at fixed values of dynamic parameters. This problem is particularly relevant for a formation that is affected by complex unstable environmental conditions, in particular, for a UAV formation.
The purpose of this work is to design an algorithm for analyzing the parametric stability of high-order agent formations with variable dynamic parameters for studying information exchange in UAV networks.
2. Parametric stability of a formation of high-order agents with variable dynamic parameters
Design an algorithm for analyzing the parametric stability of a formation of high-order agents with variable dynamic parameters
According to [10], K(s) stabilizes the dynamics of the agent formation with many inputs and many outputs P(s) according to the equation (1).
 (1)
(1)where W(jω) is estimated by equation (2).
 (2)
(2)I is the unit matrix. This condition allows you to check the stability of the formation of linear agents according to the Nyquist criterion. The Nyquist criterion states that a repetitive waveform can be correctly reconstructed provided that the sampling frequency is greater than double the highest frequency to be sampled. The relevance of the problem of parametric stability analysis is determined by the need for successful operation of the formation with variations in the parameters of mobile agents and the impact of small and large-scale interference. For the study of parametric stability, it is proposed to use a combined approach based on the Nyquist frequency criterion, D-partitioning by a set of parameters, and piecewise linear approximation of the hodograph [22].
The proposed method using approximation by continuous piecewise linear functions [22], [23] allows to analyze the parametric stability of formations described by high-order dynamics in a wide range of parameters of component agents and impacting interference.
From the automatic control theory, it is known that the introduction of a connection for a given effect does not affect the stability of the system, i.e. the stability conditions are determined only by the characteristic equation of the closed part [24]. To obtain it, it is necessary to equate the denominator of the operator transfer coefficient (characteristic polynomial) to zero like is shown in equation (3).
 (3)
(3)where N2 is regulation coefficient of the feedback circuit (deviation control), M2(p) = W(p), p = d/dt is operator.
The device is stable [25]-[26] if all the roots of equation (3) have a negative real part. If equation (3) has at least one purely imaginary root (p = jω), the formation is on the stability boundary, and the real parts of the other roots must be negative.
Thus, taking p in equation (3) and expressing N2, we get the coefficient value corresponding to the stability boundary by the equation (4):
 (4)
(4)An arbitrary frequency value ω corresponds to the complex value N2(ω). Since the coefficient N2 is a real number, the condition for the stability boundary of the formation will take the form Im [N2(ω)] = 0. According to equation (4), this condition is met if
 (5)
(5)where ωk is the critical frequencies (root values corresponding to the stability boundary), k is the root number.
With an arbitrary configuration and formation order, its complex transfer coefficient can be conveniently represented as [27] in equation (6).
 (6)
(6)The equation (6) was transform in general form for various coefficients αi, βi. To do this, the real and imaginary parts were selected in the numerator and denominator of the complex transfer function. In other words, we equate the real and imaginary parts related to the face and the denominator of the right side of the equation (6) with its equivalent on the left side of the same equation:
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)Then (6) taking into considering (7), (8), (9), (10) will take the form of equation (11)
 (11)
(11)Substituting (7)-(10) and (11) in (5), we get equation (12).
 (12)
(12)Here the coefficients are further defined by zeros: αi>I , βi>I = 0. The boundary values of N2(ω) in
(7)-(10) correspond to the roots of equation (12). Further we find these roots.
3. Calculation the polynomial roots of Algorithm
Let’s denote the left part of equation (12) as a function f (ω). The order of the polynomial f (ω) corresponds to the formation order and is equal to I, the general solution of the polynomial of arbitrary order is absent. We obtain an approximation of f (ω) based on continuous piecewise linear functions (CPLF) [28]. This allows us to determine the roots of an equation of any order with arbitrary accuracy. Set the following approximation parameters: range from ω0 to ωN , N is maximum number of the approximation node, ∆ω is step, n is current number of the approximation node. The CPLF approximating the polynomial f (ω) in the interval ω0-ωN , takes the form of the equations (13), (14), (15), (16), (17), (18).
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)where fn(ω) is the line approximating f (ω) on the section ωn–ωn+1, Kn and Ln are approximation coefficients, Qn(ω) is inclusion CPLF that forms the approximating segment of a straight line, ∆ - an arbitrarily small number, λ and γ are coefficients equal to 0 or 1.
We define the roots in equation (13) as the intersection points of approximating lines fn(ω) with the abscissa axis, that is 
 (19)
(19)As a result, we get N roots. To exclude “false” roots  , it is enough to multiply equation (19) by
, it is enough to multiply equation (19) by  to obtain equation (20).
to obtain equation (20).
 (20)
(20)The corresponding inclusion function from “false” roots is zero. The boundary values N2k for each true root are obtained by substituting non-zero values of equation (20) in equation (4), to obtain equation (21).
 (21)
(21)Given the equation (6), we get equation (22).
 (22)
(22)According to equation (22), the values are real. Omitting the imaginary co-operator, we write this expression in the form of the equation (23).
 (23)
(23)To analyze the stability of a particular variant of the formation of mobile agents, it is necessary to substitute the coefficients of the feedback loop filter (αi, βi) in these expressions. The total number of boundary coefficients is determined by the order of the equation (12) and is equal to the filter order of equation (3).
According to [24], a system without feedback is stable if the linear part is stable. Therefore, a system with deviation control (N2 = 0) is stable, that is, the value N2 = 0 belongs to the stability region of the system. Thus, in order to find the boundaries of the stability region of the system, it is necessary to select one negative and one positive value from all the boundary coefficients that are closest to zero. The figure shows the stability area - a segment N2low ≤ N2 ≤ N2up. The lower border of the region is defined as the maximum of all negative values of N2k, the upper border N2up corresponds to the minimum of all positive values of N2k. Based on the Nyquist frequency criterion using CPLF, an algorithm is proposed (Figure 1), which allows to study stable values of the transmission coefficient of the feedback circuit of a high order.
In general, the stability region is multi-connected, that is, it consists of several segments. In many practical examples [29, 30], the segments of a multi-connected domain are small and can degenerate into points when the coefficients of the characteristic polynomial vary. The choice of scheme parameters in one of these small stable segments can lead to loss of stability when changing these parameters, so it is not acceptable. Thus, stable operation of the formation is guaranteed only in a single-connected region (segment) N2low ≤ N2 ≤ N2up.
The stability (instability) of the system when fixed N2 = N2k∗ determines the stability (instability) of the segment N2k ≤ N2k∗≤ N2k+1 and can be easily checked by the Routh-Hurwitz criterion. This method allows us to calculate the boundary stable values N2low,up of formations described by high-order dynamics with an arbitrary character of inertia.
4. Results of the computational experiment for stability analysis of formations of mobile agents with the dynamics of a high order and a different nature of inertia
Let’s calculate the area of stable operation of the mobile agent formation, whose inertial properties are described by four types of filters: low-pass (LPF), high-pass (HPF), bandpass (BPF) and notch (NRF). LPF and HPF have the order up to the 10th inclusive (I = 1...10), for BPF and NF I = 2, 4, 6, 8, 10. Each LPF and HPF consists of the same first-order filters. The composition of the BPF and the NF is equal to the number of lowpass and highpass filter links of the first order.
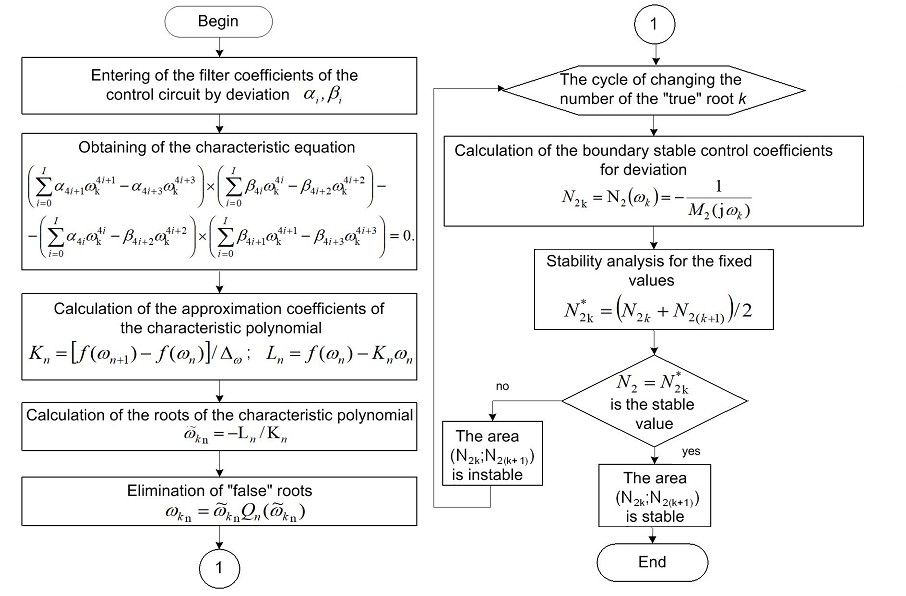
Figure 1
Block diagram of the algorithm for analyzing the parametric stability of mobile agent formations based on the Nyquist criterion and CPLF
Filters’ transfer functions have the form of the equations (24), (25), (26) and (27):
 (24)
(24)
 (25)
(25)
 (26)
(26)
 (27)
(27)Here, T is the time constant of the LPF and HPF link, γ is the ratio of the constant time of the LPF and HPF links in the BPF and NF. The filter coefficients are determined by the expression of the transfer function for a specific type and order of the filter. The polynomial of the left part of equation (12) is obtained taking into account (7)-(10) for the found values of coefficients. The resulting dependencies are shown in Figure 2.
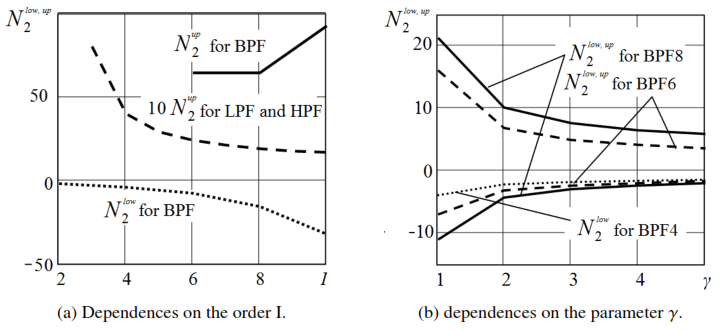
Figure 2
Areas of stability of mobile agent formations with different inertial properties using MATLAB software
The lower limit of stability equals to –1 for any order of LPF and LPF (not shown in the figure). For these types of filters, there are no upper boundary values for I=1 and I=2 (N2up→∞), and the formation with the inertial characteristic of the LPF or LPF is stable for values N2 ≥ −1. As the order increases, the stability area narrows from the top (N2up decreases).
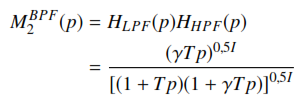
The stability region of a formation with inertial properties of BPF at γ = 1 has a different character (Figure 2a). For values I=2 and I=4, there is no upper bound (N2up→∞). As the order increases, the stability area expands both above and below.
The regions of stability of the formation by the inertial properties of BPF of different order for values γ :1–5 are shown in Figure 2b. As can be seen from the figure, when increasing γ and in any order, the stability area narrows both from above and from below. For the NF, Nlow is weakly dependent on the order for any γ, the approximate value N2low ≈ −1, and the upper bound is equal to N2up→∞ (not shown in the figure).
5. Conclusions
The relevance of the stability analysis of high-order mobile agent formations with variable dynamic parameters for the study of information exchange in UAV networks is noted. A method for analyzing the stability of a formation with an inertial characteristic described by a high-order transfer function with variable coefficients has been developed. The new approach is based on the use of the Nyquist time criterion and a piecewise linear approximation of the hodograph of the transfer function of the formation. A computational experiment was performed to analyze the stability of a mobile agent formation whose inertial properties are described by four types of filters of different orders: low-pass, high-pass, band-pass, and notch filters from the 1st to the 10th order inclusive. The calculated boundaries of the formation stability regions were verified using the Routh-Hurwitz criterion and the D-partition method. In contrast to the Routh-Hurwitz test, the developed method does not require solving a system of inequalities to study the parametric stability of the system; it also does not require constructing a hodograph or boundary curves.
Acknowledgments
The work was supported by RFBR grant 19-29-06030-MK “Research and development of wireless ad- hoc network technology between UAVs and smart city dispatch centers based on adaptation of transmission mode parameters at different levels of network interaction”. The theory was prepared in the framework of the state task FZWG-2020-0029 “Development of theoretical foundations for building information and analytical support for telecommunication systems for geo-ecological monitoring of natural resources in agriculture”.
6. References
[1] R. Burns, C. McLaughlin, J. Leitner, and M. Martin, “TechSat21: Formation design, control, and simulation,” in 2000 IEEE Aerospace Conference. Proceedings (Cat. No.00TH8484). Big Sky, MT, USA: IEEE, 2000, pp. 19–25.
[2] W. H. Clohessy and R. S. Wiltshire, “Terminal guidance system for satellite rendezvous,” Journal of the Aerospace Sciences, vol. 27, no. 9, pp. 653–658, 1960.
[3] H. H. Yeh, E. Nelson, and A. Sparks, “Nonlinear tracking control for satellite formations,” Journal of Guidance, Control, and Dinamics, vol. 25, no. 2, pp. 376–386, 2002.
[4] L. E. Buzogany, M. Pachter, and J. J. D’Azzo, “Automated control of aircraft in formation flight,” in Proceedings of the AIAA Conference on Guidance, Navigation, and Control, Monterey,CA,U.S.A., 1993, pp. 1349–1370.
[5] F. Giuletti, L. Pollini, and M. Innocenti, “Autonomous formation flight,” IEEE Control Systems Magazine, vol. 20, no. 6, pp. 34–44, 2000.
[6] J. D. Wolfe, D. F. Chichka, and J. L. Speyer, “Decentralized controllers for unmanned aerial vehicle formation flight,” in Proceedings of AIAA Conference on Guidance, Navigation, and Control, San Diego,CA,U.S.A., 1996.
[7] J. G. Bender, “An overview of systems studies of automated highway systems,” IEEE Transactions on Vehicular Technology, vol. 40, no. 1, pp. 82–99, 1991.
[8] S. E. Shladover, “Automatic vehicle control developments in the PATH program,” IEEE Transactions on Vehicular Technology, vol. 40, no. 1, pp. 114–130, 1991.
[9] S. Darbha and J. Hedrick, “Constant Spacing Strategies for Platooning in Automated Highway Systems,” Journal of Dynamic Systems Measurement and Control-transactions of The Asme - J DYN SYST MEAS CONTR, vol. 121, no. 3, pp. 462–470, 1999.
[10] J. Fax and R. Murray, “Information Flow and Cooperative Control of Vehicle Formations,” IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1465–1476, 2004.
[11] A. V. Proskurnikov, “Frequency-domain criteria for consensus in multiagent systems with nonlinear sector-shaped couplings,” Automation and Remote Control, vol. 75, no. 11, pp. 1982–1995, 2014.
[12] N. Chopra and M. W. Spong, Advances in robot control. Berlin: Springer-Verlag, 2006, ch. Passivity-based control of multi-agent systems, pp. 107–134.
[13] M. Arcak, “Passivity as a Design Tool for Group Coordination,” IEEE Transactions on Automatic Control, vol. 52, no. 8, pp. 1380–1390, 2007.
[14] B. R. Andrievsky, A. S. Matveev, and A. L. Fradkov, “Management and evaluation under information constraints: towards a unified theory of control, computation, and communication,” Automatics and telemechanics, vol. 4, pp. 34–99, 2010.
[15] B. R. Andrievsky and A. L. Fradkov, “Control and monitoring through communication channels with limited bandwidth,” Gyroscopy and navigation, vol. 4, no. 67, pp. 103–114, 2009.
[16] L. Bazzi and S. Mitter, “Endcoding complexity versus minimum distance,” IEEE Transactions on Information Theory, vol. 51, no. 6, pp. 2103–2112, 2005.
[17] V. Bondarko, “Stabilization of linear systems via a two-way channel under information constraints,” Cybernetics and Physics, vol. 3, no. 4, pp. 157–160, 2014.
[18] G. Goodwin, K. Lau, and M. Cea, “Control with communication constraints,” in 12th International Conference: Control Automation Robotics & Vision (ICARCV), 2012, 2012, pp. 1–10.
[19] G. Nair, R. Evans, I. Mareels, and W. Moran, “Topological feedback entropy and nonlinear stabilization,” IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1585–1597, 2004.
[20] G. Nair, F. Fagnani, S. Zampieri, and R. Evans, “Feedback control under data rate constraints: an overview,” Proceedings of the IEEE, vol. 95, no. 1, pp. 108–137, 2007.
[21] K. S. Amelin, B. R. Andrievsky, S. I. Tomashevich, and A. L. Fradkov, “Data transfer with adaptive encoding between quadrocopters in formation, UBS, 62 (2016), 188-213,” Autom. Remote Control, vol. 80, no. 1, pp. 150–163, 2019.
[22] I. A. Kurilov, Radio Engineering and tele-communication systems, 2012, ch. Research on the stability of a signal converter based on continuous piecewise linear functions, pp. 4–7.
[23] G. S. Vasilyev, I. A. Kurilov, and S. M. Kharchuk, “Analysis of parametrical stability of the amplitude-phase converter with various filters,” in International Siberian ConferenceControl and Communications (SIBCON) 2013, Krasnodar, 12-13 September 2013.
[24] G. Zaitsev, V. Bulgach, and G. Radzivilov, “Modeling of Combined Tracking Systems under Random Setting Action,” Journal of Automation and Information Sciences - J AUTOMAT INF SCI, vol. 37, pp. 22–25, 2005.
[25] I. S. Gonorovsky, Radio engineering circuits and signals. textbook for universities, 2nd ed. Moscow: Soviet radio, 1971.
[26] M. M. Postnikov, Stable polynomials. Moscow: Nauka, 1981.
[27] I. A. Kurilov, “Research of static modes of signal converters under internal perturbations,” in Questions of Radioelectronics, I. A. Kurilov, G. S. Vasiliev, and S. M. Kharchuk, Eds. Series: General Technical, 2010, no. 1.
[28] I. A. Kurilov, “Study of stability of a signal converter based on continuous piecewise linear functions,” in Radio Engineering and telecommunication systems, I. A. Kurilov, G. S. Vasilyev, S. M. Kharchuk, and D. I. Surzhik, Eds. Series: General Technical, 2012, no. 12, pp. 2–40.
[29] E. N. Gryazina, “Current state of the D-partition method,” in Automatics and telemechanics, I. A. Kurilov, G. S. Vasilyev, S. M. Kharchuk, and D. I. Surzhik, Eds. Series: General Technical, 2008, no. 1, pp. 4–7.
[30] E. N. Gryazina, “On the theory of D-partition,” in Automatics and telemechanics, 2004, no. 12, pp. 15–28.
Author notes
eav@ores.su
Alternative link
http://servicio.bc.uc.edu.ve/ingenieria/revista/v27n2/art09.pdf (pdf)