Sistemas e Informática
Controlador PID con algoritmos genéticos de números reales
PID CONTROLLER WITH REAL NUMBER GENETIC ALGORITHMS
Controlador PID con algoritmos genéticos de números reales
Industrial Data, vol. 22, núm. 2, 2019
Universidad Nacional Mayor de San Marcos

Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional.
Recepción: 21 Julio 2019
Aprobación: 23 Septiembre 2019
Resumen: Un algoritmo genético o genetic algorithm (GA) es una técnica de la inteligencia artificial que es utilizada en cualquiera de las especialidades de ingeniería. En el presente estudio, el GA propuesto encuentra valores óptimos para los parámetros Kp, Ki y Kd de un controlador PID, utilizado ampliamente en la industria. Los cromosomas, formados con los genes Kp, Ki y Kd, representados por números reales, evolucionan y son evaluados mediante el error cuadrático medio (ECM) de la salida deseada. En ese sentido, la solución es el cromosoma con menor ECM, el cual produce menores transitorios en la salida. Además, el GA ha sido codificado en lenguaje M (MATLAB) y los resultados han sido comparados con otros trabajos.
Palabras clave: algoritmos genéticos, genes de números reales, PID, error cuadrático medio.
Abstract: A genetic algorithm (GA) is an artificial intelligence technique that can be applied to any engineering specialty. In this study, the proposed GA finds optimal values for PID controller parameters Kp, Ki and Kd, which are widely used in the industry. Chromosomes, composed of Kp, Ki and Kd genes, represented by real numbers, evolve and are evaluated by the mean square error (MSE) of the desired output. In that sense, the solution is the chromosome with the lowest MSE, which produces less transient output. In addition, the GA has been encoded in MATLAB language and results have been compared with other works.
Keywords: genetic algorithms, real number genes, PID, mean square error.
INTRODUCCIÓN
Un proceso industrial puede verse como un sistema cerrado (retroalimentado) constituido por un controlador y una planta controlada. Para el diseño del controlador, una de las técnicas más utilizadas, por su simplicidad y robustez, es la denominada proporcional integral derivativo (PID); sin embargo, no es una tarea fácil encontrar los valores óptimos de los parámetros del controlador denominados Kp, Ki y Kd. Por ese motivo, para el cálculo de esos parámetros, se ha propuesto como solución utilizar algoritmos de inteligencia artificial; por ejemplo, se tiene: optimización de enjambre de partículas (PSO) (Iwan et al., 2011), optimización de colonia de hormigas (ACO) (Lahlouh et al., 2019), lógica difusa (Akbari-Hasanjani et al., 2015), redes neuronales (Hernández et al., 2016), algoritmos genéticos (GA) (Feng et al., 2018), entre otros. En el presente estudio se describe la elaboración de un GA, codificado en lenguaje M de MATLAB, que calcula los parámetros Kp, Ki y Kd del controlador, de tal modo que la salida del sistema (controlador más planta) se estabilice al valor deseado, minimizando sus valores transitorios de sobreimpulso, tiempo de establecimiento y tiempo de subida.
Un algoritmo genético (GA) es un algoritmo de búsqueda que sigue el paradigma de la evolución. A partir de una población inicial, el algoritmo aplica operadores genéticos (selección, cruce y mutación) para producir descendientes (en la terminología de búsqueda local, corresponde a explorar el vecindario), que son claramente más aptos que sus antepasados. En cada generación (iteración), cada nuevo cromosoma corresponde a una solución (Pezzella et al., 2008). Los métodos para seleccionar los cromosomas que van a generar descendientes dan preferencia a aquellos con mayores valores de aptitud; entre estos métodos de selección se tiene a los siguientes: selección por ruleta, selección por torneo, ranking lineal, etc. Asimismo, en este estudio se ha utilizado la selección de ranking lineal porque con ella se logra asignar a los cromosomas, ranqueados de acuerdo a su valor de aptitud, distintos valores de probabilidad que se diferencian en una proporción lineal decreciente desde el mejor hasta el peor ranqueado; es decir, las probabilidades que tienen los cromosomas de ser seleccionados no se diferencian en forma desproporcionada.
Los métodos para realizar el cruce de los cromosomas son diversos y dependen de la naturaleza de los genes, los cuales puede ser binarios, permutados, de números reales, etc. Así, entre los métodos de cruce, se tiene a los siguientes: SPX (single point exchange), DPX (double point crossover), PMX (partially matched crossover), OX (order crossover), CX (cycle crossover), aritmético, etc. (Haupt y Haupt, 2004). Este último, el aritmético, ha sido utilizado en el presente trabajo, por ser adecuado para genes de números reales. Así, mientras que el cruce tiende a que la población genética converja, preferiblemente a valores óptimos, la mutación tiene como objetivo mantener un cierto nivel de diversidad en la población, es decir, evitar que la población converja rápidamente (Srinivas y Patnaik, 1994; Schaffer y Eshelman, 1991; Beck, 2000). La mutación utilizada con mayor frecuencia es aquella en que uno de los genes (variables) del cromosoma varía aleatoriamente (Gestal et al., 2010). Por último, el número de mutaciones se calcula mediante un porcentaje con respecto al tamaño de la población.
De esta forma, el problema por solucionar es multiobjetivo, porque se desea minimizar más de una variable, las que son: el sobreimpulso, el tiempo de establecimiento y el tiempo de subida de la respuesta del sistema. No obstante, para mayor sencillez, el problema ha sido tratado como mono-objetivo, es decir, persiguiendo un solo objetivo, que se correlacione con las variables de interés. En este sentido, se ha seleccionado como función objetivo, también denominado como función aptitud, función de ajuste, función fitness o función costo, al error cuadrático medio (ECM) de la salida.
Por otro lado, el código del programa se ha escrito en lenguaje de MATLAB. El programa ha corrido controlando las plantas utilizados por otros investigadores, de esta forma se ha podido comparar resultados y demostrar que el algoritmo propuesto ha tenido un buen desempeño, ya que ha encontrado los valores adecuados de Kp, Ki y Kd del controlador PID con los cuales se han minimizado el sobreimpulso, el tiempo de establecimiento y el tiempo de subida de la respuesta del sistema.
METODOLOGÍA
La estructura del algoritmo implementado se describe en la figura 1. Después de creada una población genética inicial, se evalúa cada cromosoma de la población calculando el error cuadrático medio (ECM) de la salida que le corresponde. Luego, se ordenan a los cromosomas de menor a mayor valor según su ECM y, posteriormente, entre los cromosomas más aptos se seleccionan a los que se van a cruzar con el objeto de generar descendencia, se mutan aleatoriamente a los cromosomas para luego realizar una nueva evaluación. El proceso se reitera tantas veces como lo permita el número de generaciones indicado por el usuario. Finalmente, se obtendrá la población óptima y el mejor cromosoma será el primero de la lista. En los párrafos siguientes se dan mayores precisiones sobre cada etapa.
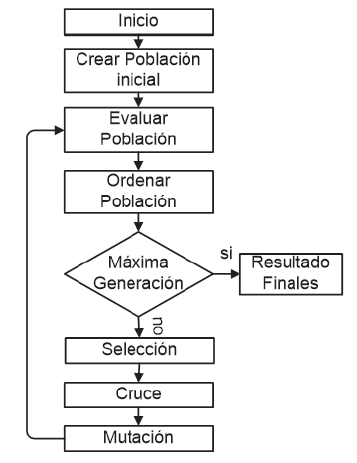
elaboración propia.
Población
La población genética está constituida por un número de cromosomas, en donde cada uno contiene un número de genes. Por la naturaleza del problema, se definió que cada cromosoma estuviera constituido por tres genes o variables de números reales, lo cual matemáticamente significa que un cromosoma es un vector de tres elementos, en donde cada elemento son las variables proporcional (KP), integral (Ki) y derivativa (Kd). De esta manera, cada vector (cromosoma) es una probable solución del problema, por lo que la población genética se ha construido como un arreglo de N filas por tres columnas, donde N es el número de cromosomas o tamaño de la población y cada una de las tres columnas representan respectivamente a las variables Kp, Ki y Kd. La población inicial ha sido creada con números reales aleatorios respetando los intervalos mínimo y máximo (rangos) de cada variable indicadas por el usuario. La figura 2 muestra parte del código que crea a la población genética:
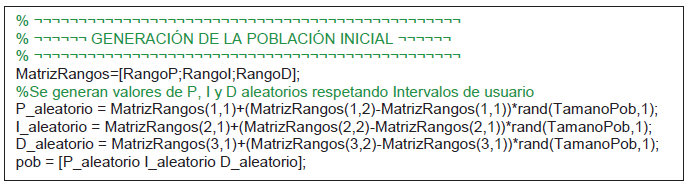
Figura 2
Parte del código que genera la población genética
elaboración propia.
Selección
En el tipo de selección de ranking lineal, los cromosomas son clasificados de acuerdo con su valor de ajuste y un rango ri ∈ {1, ..., N} se asigna a cada uno, donde N es el tamaño de la población. El mejor cromosoma obtiene el rango N mientras que el peor obtiene el rango 1. Luego: Pi = (2ri)/N(N+1) es la probabilidad de elegir el i-enésimo cromosoma en el ranking lineal (Pezzella et al., 2008).
En este sentido, se escogen a los n primeros cromosomas para cruzarse, donde n es el producto de la tasa de cruce por el número total de la población. Luego, se le otorga mayor probabilidad de cruce a los mejores ranqueados, formando un arreglo denominado «ánfora», en donde los números que identifican a los cromosomas se repiten proporcionalmente a su importancia (Tejada, 2017). Así, por ejemplo, suponiendo que se ha escogido a los cuatro primeros cromosomas de la población (1,2,3,4), con ellos se genera una «ánfora», dando mayor prioridad de ser elegido al primer cromosoma porque es el mejor ranqueado de la población; esta se construye de la siguiente manera:
ánfora = (4 3 3 2 2 2 1 1 1 1)
Esto indica que, al seleccionar aleatoriamente un cromosoma de la «ánfora», el cromosoma 1 tiene la mayor probabilidad de ser elegido (4/10=40%), seguido del cromosoma 2 (3/10=30%), luego el cromosoma 3 (2/10=20%) y, finalmente, el cromosoma 4 (1/10=10%). Después, se selecciona de la «ánfora», mediante un sorteo, los padres y madres que se aparearán de acuerdo con el número de cruces especificado por el usuario. Se forman dos vectores, un vector de «padres» y un vector de «madres», así como se representan a continuación:
padres = (1 2 1 2 2 1 1 2)
madres = (2 1 2 4 1 3 3 2)
Hasta aquí, la etapa de selección termina su tarea. Luego, en la etapa de cruce, se van a cruzar los cromosomas: (1, 2), (2, 1), …, (1, 3), (2, 2). Los mismos padres pueden cruzarse varias veces y siempre van a generar hijos diferentes. Además, puede ocurrir que, tanto el padre como la madre, sean los mismos cromosomas, por lo que no es necesario evitarlo, esto no ha afectado el desempeño del algoritmo. La figura 3 muestra parte del código de la selección:
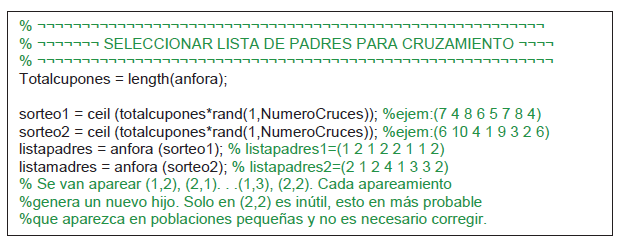
Figura 3
Parte del código de la selección
elaboración propia.
Cruce
El operador de cruce aritmético de números reales puede generar hasta dos descendientes que son una combinación lineal de dos cromosomas X e Y (Yalcinoz y Altun, 2001):
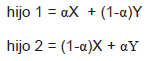
Donde

se escoge aleatoriamente entre 0 y 1.
En esta investigación se ha preferido generar por cada cruce un solo hijo, por lo que el número de padres es igual al número de cruces. Esto se ha realizado con el objeto de dar oportunidad a que más padres generen descendencia obteniendo mayor diversidad en la población. Si se hubiera optado por generar dos hijos en cada cruce, solo se hubiera seleccionado para cruzarse la mitad del número de padres. La figura 4 muestra parte del código de cruce:
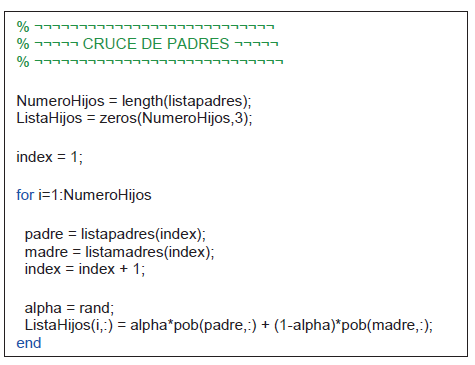
Figura 4
Parte del código de cruce
elaboración propia.
Mutación
Una vez seleccionado al azar un cromosoma de la población y la variable que será modificada (Kp, Ki o Kd), esta variable es remplazada por un número aleatorio:
pob(cromosoma, variable) <- valor aleatorio
Sin embargo, como cada variable tiene un valor dentro de un intervalo especificado por el usuario (Imin, Imax); entonces, para evitar que la mutación destruya un valor válido de la variable, el valor aleatorio tiene que estar dentro de ese rango especificado, por lo que el reemplazo debe ser (Seck Tuoh, et al., 2016):
pob(cromosoma, variable) <- Imin + (Imax-Imin)*valor aleatorio
Otro importante punto que se ha tenido en cuenta es que nunca se elegirá al primer cromosoma para ser mutado, de tal manera que se conservará sin cambios al mejor rankeado, que pasará a la siguiente generación. La figura 5 muestra parte del código de mutación:
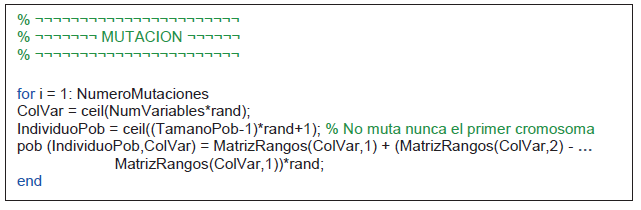
Figura 5
Parte del código de mutación
elaboración propia.
Evaluación
Se ha creado la función PID_ERROR_OBJETIVO, con la cual se evalúa a cada cromosoma de la población. De esta manera, con los valores Kp, Ki y Kd de cada cromosoma se calcula la función de transferencia del controlador PID. Luego, con la función de transferencia del controlador y con la función de transferencia de la planta del sistema se configura un sistema cerrado retroalimentado. Finalmente, con el sistema cerrado retroalimentado se calcula su respuesta frente a la entrada de un escalón de amplitud uno (1). En todo este proceso, para abreviar cálculos, se han utilizado las funciones de MATLAB: tf (la cual crea una función de transferencia de tiempo continuo), series (la que conecta dos modelos o dos funciones de transferencias) y feedback (encuentra la función de dos modelos, uno de los cuales pertenece al lazo de realimentación), un procedimiento similar se realiza en el estudio de Ibrahim Mohamed (2005).
Durante el transitorio que demora la función de salida hasta alcanzar el valor de 1, se hubiera podido encontrar por cada cromosoma los valores que toman las siguientes variables: tiempo de subida, sobreimpulso, tiempo de establecimiento, entre otros. De esta manera, se hubiera tenido que clasificar a los cromosomas que tengan a esas variables minimizadas, con lo cual el problema hubiera sido multiobjetivo. Sin embargo, todas las variables anteriores se pueden correlacionar con una sola variable, convirtiendo el problema a mono-objetivo. Es por eso que, en este estudio, se ha optado por calcular por cada cromosoma el error cuadrático medio (ECM) de la salida.
En ese sentido, el progreso del valor de la salida (Yi) hasta alcanzar el valor del escalón es leído durante n espacios de tiempo, calculando el error cuadrático medio (ECM) de la siguiente forma:
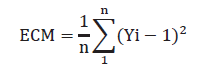
Donde:
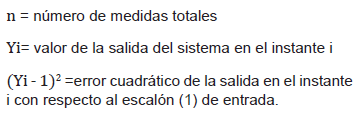
Por cada cromosoma de la población, se tiene que realizar el cálculo de ECM de la manera antes descrita, con lo cual la función objetivo finaliza su tarea. Posteriormente, el algoritmo asocia a cada cromosoma un valor de ECM que lo identificará y los miembros de la población, de acuerdo con su ECM, son ordenados de menor a mayor valor, garantizando indirectamente un ranking ordenado de cromosomas de mejores características de tiempo de subida, sobreimpulso y tiempo de establecimiento. La figura 6 muestra la parte del código de evaluación:
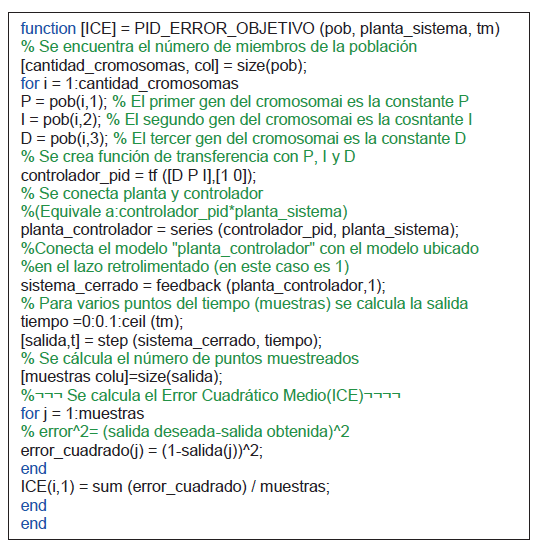
Figura 6
Código de evaluación
elaboración propia.
El programa de software desarrollado se ha codificado en el lenguaje de MATLAB. Los resultados, tales como el valor de Kp, Ki, Kd y las características de la curva de salida, obtenidas con la función stepinfo, han sido exportados a una hoja de Excel mediante la función de MATLAB xlswrite, donde también se han generado los gráficos con las curvas de salida.
Los investigadores que han diseñado sus propios algoritmos genéticos o algoritmos genéticos difusos, entre otros, han contrastado sus resultados con los obtenidos con el método clásico de Ziegler-Nichols, exhibiendo buenos resultados. Por esta razón, se ha creído conveniente probar el algoritmo diseñado con los modelos de plantas utilizados por estos investigadores.
RESULTADOS
El programa ha sido ejecutado utilizando los modelos matemáticos de procesos (plantas) aplicados por otros estudiosos, lo cual ha permitido comparar resultados. Se ha seleccionado a los autores que han comparado sus datos con el método clásico de Ziegler-Nichols.
Para todos los casos, el programa se ha ejecutado con las siguientes especificaciones: tamaño de la población = 40, número de variables = 3, porcentaje de cruces = 70%, porcentaje de mutación = 10%, número de generaciones = 20.
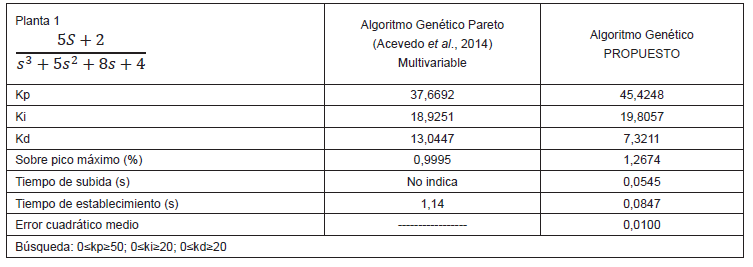
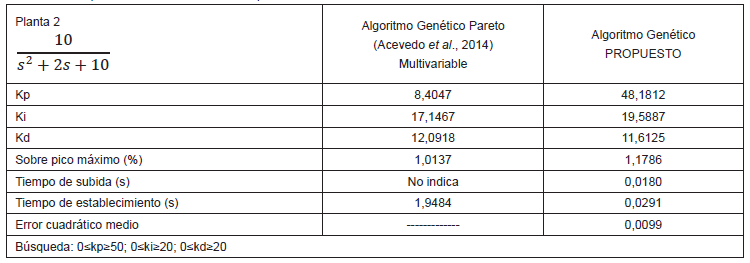
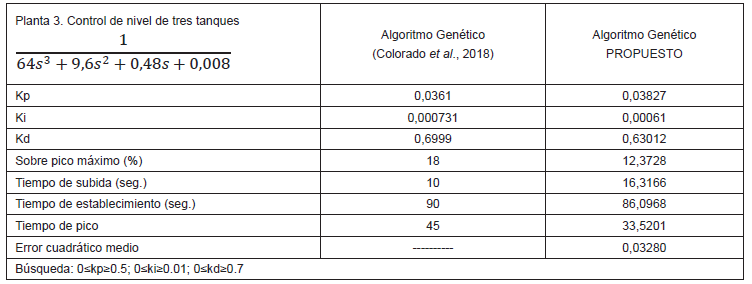
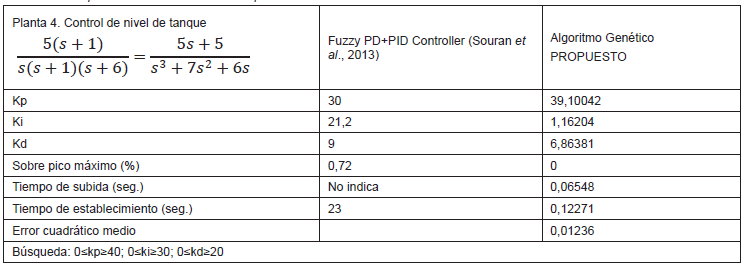
Las tablas 1, 2, 3 y 4 muestran el modelo matemático de la planta controlada, los parámetros del controlador PID (Kp, Ki y Kd), los valores transitorios de la salida (sobre pico máximo, tiempo de subida, tiempo de establecimiento) y el error cuadrático medio. Además, se comparan los resultados con los obtenidos por otros investigadores, la columna «Algoritmo Genético Propuesto» corresponde al presente trabajo. Los intervalos de búsqueda para cada variable se muestran en la última fila de cada tabla.
Tabla 1. Comparaciones con resultados para Planta 1.
elaboración propia.
elaboración propia.
Elaboración propia.
elaboración propia.
Las figuras 7, 8, 9 y 10 muestran gráficamente los resultados de las tablas anteriores, la salida deseada del sistema se muestra con líneas punteadas y ha sido fijada para una amplitud de 1 (un escalón Step Response). Además, la línea azul es la salida del sistema que alcanza finalmente a la salida deseada.
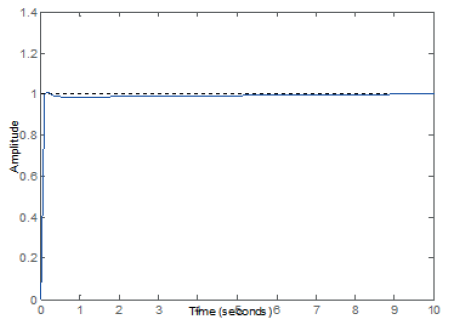
Figura 7.
Respuesta controlada de la Planta 1 (tabla 1).
elaboración propia.
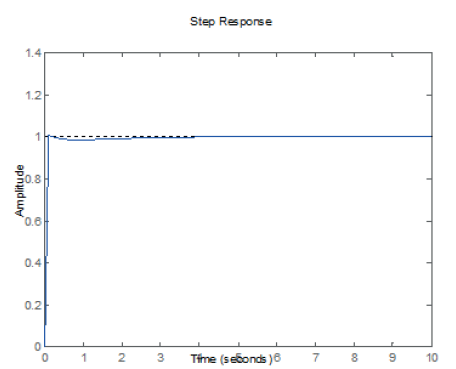
Figura 8.
Respuesta controlada de la Planta 2 (tabla 2).
elaboración propia.
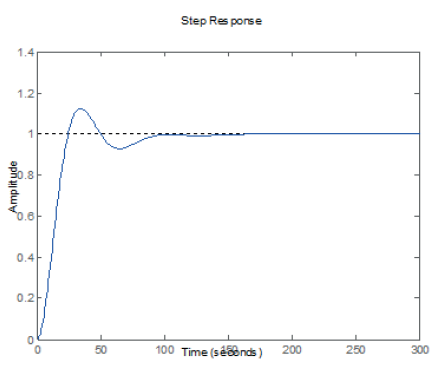
Figura 9
Respuesta controlada de la Planta 3 tabla 3
elaboración propia.
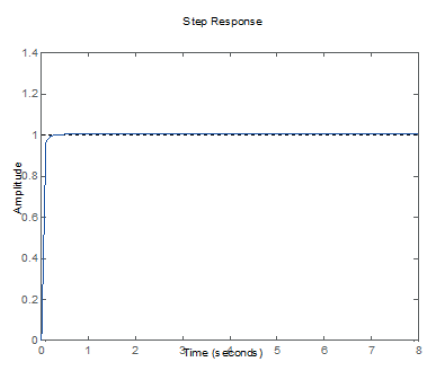
Figura 10.
Respuesta controlada de la Planta 4 (tabla 4).
elaboración propia.
DISCUSIÓN
Como se puede observar de los resultados de las tablas 1, 2, 3 y 4, en todos los casos los sobre picos máximos han sido similares, los tiempos de establecimientos han sido superiores en todos los casos y solo en la tabla 3 el tiempo de subida no ha sido el mejor. Estos resultados demuestran que el algoritmo propuesto ha tenido un buen desempeño en encontrar los valores adecuados de Kp, Ki y Kd del controlador PID. Además, para todos los casos se ha utilizado las mismas especificaciones de tamaño de población, porcentaje de cruce, porcentaje de mutación y número de generaciones lo cual demuestra que el algoritmo es bastante robusto.
CONCLUSIONES
Mediante algoritmos genéticos, se ha solucionado el problema de sintonizar los parámetros proporcional, derivativo e integral de un controlador PID, minimizando el tiempo de establecimiento y el sobreimpulso de la respuesta en plantas no lineales. Asimismo, se ha probado que los resultados obtenidos han sido óptimos al compararlos con resultados de otras investigaciones, mostrados en las tablas 1, 2, 3 y 4.
Además, se ha probado que el algoritmo diseñado como mono-objetivo ha sido eficiente al minimizar, indirectamente, diversas variables (sobreimpulso, tiempo de establecimiento, tiempo de subida) mediante la minimización de una sola variable: el error cuadrático medio, en contraposición con un algoritmo genético multiobjetivo basado en el enfoque de Pareto, como el presentado por Acevedo et al. (2014).
REFERENCIAS BIBLIOGRÁFICAS
Acevedo, B.; Fonseca, J. y Gómez, J. (2014). Desarrollo de una herramienta en Matlab para sintonización de controladores PID, utilizando algoritmos genéticos basado en técnicas de optimización multiobjetivo. Revista SENNOVA, 1(1), 80-103.
Akbari-Hasanjani, R.; Javadi, S. y Sabbaghi-Nadooshan, R. (2015). DC motor speed control by self-turning fuzzy PID algorithm. Transactions of the Institute of Measurement and Control, 37(2), 164-176.
Beck, F. (2000). Escalonamiento de tarefas job-shop realistas utilizando algoritmos genéticos en Matlab. (Tesis de maestría). Universidad Federal de Santa Catarina, Florianópolis, SC.
Colorado, O.; Hernández, N.; Seck Tuoh, J. y Medina, J. (2018). Algoritmo genético aplicado a la sintonización de un controlador PID para un sistema acoplado de tanques. PADI Boletín Científico de Ciencias Básicas e Ingenierías del ICBI, 5(10), 50-55.
Feng, H.; Yin, C.; Weng, W.; Ma, W.; Zhou, J.; Jia, W. y Zhang, Z. (2018). Robotic excavator trajectory control using an improved GA based PID controller. Mechanical Systems and Signal Processing, 105, 153-168.
Gestal, M.; Rivero, D.; Rabuñal, J.; Dorado, J. y Pazos, A. (2010). Introducción a los algoritmos genéticos y la programación genética. La Coruña, España: Universidad de La Coruña.
Haupt, R. y Haupt, S. (2004). Practical genetic algorithms. Nueva Jersey, EE. UU.: Wiley-Interscience.
Hernández, R.; García, L.; Salgado, T.; Gómez, A. y Fonseca, F. (2016). Neural network-based self-turning PID control for underwater vehicles. Sensors, 16(9). Recuperado de https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5038707/.
Iwan, M.; Fook, L. y Leap, M. (2011). Tuning of PID controller using particle swarm optimization (PSO). International Journal on Advanced Science, Engineering and Information Technology, 1(4), 458-461. Recuperado de http://insightsociety.org/ojaseit/index.php/ijaseit/article/viewFile/93/98.
Lahlouh, I.; Elakkary, A. y Sefiani, N. (2019). PID controller of a MIMO system using ant colony algorithm and its application to a poultry house system. En H. Hachimi (Ed.), 2019 5th International Conference on Optimization and Application (ICOA) llevado a cabo en Marruecos.
Mohamed, I. (2005). The PID controller design using genetic algorithm. (Tesis de pregrado). University of Southern Queensland, Toowoomba, QLD.
Pezzella, F.; Morganti, G. y Ciaschetti, G. (2008). A genetic algorithm for the flexible job-shop scheduling problema. Computers & Operations Research, 35(10), 3202-3212.
Schaffer, J. y Eshelman, L. (1991). On crossover as an evolutionarily viable strategy. International Conference on Genetic Algorithms, 4, 61-68.
Seck Tuoh, J.; Medina, J. y Hernández, N. (2016). Introducción a los algoritmos genéticos con Matlab. Recuperado de https://repository.uaeh.edu.mx/bitstream/bitstream/handle/123456789/16991/introduccion_a_los_algoritmos_geneticos_con_matlab.pdf.
Souran, D.; Abbasi, S. y Shabaninia, F. (2013). Comparative study between tank’s water level control using PID and fuzzy logic controller. En V. Balas, J. Fodor, A. Várkonyi-Kóczy, J. Dombi y L. Jain (Eds.), Soft computing applications V. 195 (pp. 141-153). Berlín, Alemania: Springer-Verlag Berlin Heidelberg.
Srinivas, M. y Patnaik, L. (1994). Adaptive probabilities of crossover and mutation in genetic algorithms. IEEE Transactions on Systems, Man, and Cybernetics, 24(4), 656-667.
Tejada, G. (2017). Enrutamiento y secuenciación óptimos en un flexible job shop multiobjetivo mediante algoritmos genéticos. (Tesis doctoral). Universidad Nacional Mayor de San Marcos, Lima.
Yalcinoz, T. y Altun, H. (2001). Power economic dispatch using a hybrid genetic algorithm. IEEE Power Engineering Review, 21(3), 59-60.