Artículos originales
Reel Parameters Adjustment during Mechanical Harvest of Rice in Cuban Conditions
Ajuste de los parámetros del molinete durante la cosecha mecanizada del arroz en Cuba
Reel Parameters Adjustment during Mechanical Harvest of Rice in Cuban Conditions
Revista Ciencias Técnicas Agropecuarias, vol. 26, núm. 4, 2017
Universidad Agraria de La Habana Fructuoso Rodríguez Pérez
Recepción: 25 Enero 2017
Aprobación: 11 Septiembre 2017
Abstract: According to international experience, grain losses due to poor regulation of the reel have a significant weight (approximately between 33 and 73%) within the total losses attributable to the rice harvesters, being able to reach up to 23% of the total harvested product. The national practice of regulating the windlass during the mechanized harvesting of rice does not include the application of scientific principles that are established internationally in the theory of agricultural machinery. Consequently, it is necessary to carry out studies where these concepts are applied, to perfect the harvesting process, minimizing the losses attributable to poor regulation of this body of work. These conceptual models were applied and computerized programmed. As input data they were taken: the construction, exploitation and regulation parameters of the windlass of the combined Claas-Crop Tiger 30, used in production conditions (Agro industrial Grain Company of Amarillas locality, Matanzas province) and the properties of the harvested crop (Oriza sativa, variety “Reforma”). As a result, it was determined that, most of the requirements for good windmill exploitation are not met. Correction of exploitation and regulation parameters is proposed to minimize the losses attributable to the action of this body of work.
Keywords: Mechanized harvesting, losses, regulation, Oriza sativa.
Resumen: De acuerdo a la experiencia internacional, las pérdidas de granos debido a una deficiente regulación del molinete, presentan un peso importante (aproximadamente entre 33 y 73%) dentro de las pérdidas totales achacables a las máquinas cosechadoras de arroz, pudiendo alcanzar hasta un 23% del total del producto cosechado. La práctica nacional de regulación del molinete durante la cosecha mecanizada del arroz, no incluye la aplicación de principios científicos que están establecidos internacionalmente en la teoría de máquinas agrícolas, por lo que se hace necesario efectuar estudios donde se apliquen estos conceptos, de manera de perfeccionar el proceso de cosecha, minimizando las pérdidas achacables a una mala regulación de este órgano de trabajo. Como resultado de la aplicación y programación computarizada de estos modelos conceptuales, y tomando como datos de entrada los parámetros constructivos, de operación y de regulación del molinete de la combinada Claas-Crop Tiger 30, empleados en condiciones de producción (Empresa Agroindustrial de Granos de la localidad de Amarillas, provincia de Matanzas) y las propiedades del cultivo cosechado (Oriza sativa, variedad “Reforma”) se determinó que no se satisface la mayor parte de los requisitos exigidos para un buen funcionamiento del molinete, proponiéndose la corrección de los principales parámetros de operación y regulación, con vistas a minimizar las pérdidas achacables a la acción de este órgano de trabajo.
Palabras clave: cosecha mecanizada, pérdidas, regulación, Oriza sativa.
INTRODUCTION
Rice is the staple food of more than half of the world’s population. FAO forecasts that by 2030 grain demand will be 38% higher than the volume produced at the end of the 20th century (Grogg, 2005).
In Cuba, rice is part of the basic diet of the population, with an annual per capita consumption of 72 kg, ranking among the top places in Latin America, however, national production only satisfies a little more than 50% of the demand. Consequently, the country is forced to allocate large sums to the importation of this item (González, 2011; Polón-Pérez et al., 2012). Rice production in Cuba has a high degree of mechanization. The machinery that participates in the rice harvest belongs to a certain Agroindustrial Grains Company (EAIG) and is grouped in mechanized complexes, which in turn make up the productive links of the harvest, an aspect that allows obtaining a better attention to the organizational, technical and technological problems that arise during the production process. The structure and composition of the productive link of the crop is one of the fundamental aspects that determine the efficiency of the technological process of the rice harvest (Morejón, 2015).
In addition to the organizational aspects of the process, it is necessary, to minimize losses, to ensure an effective exploitation of the machines, which presents as a starting point, an adequate regulation of their working organs. The theoretical treatment of the windlass action in the grain harvesters and their interrelation with the other working organs of the cutting platform (the cutting organ and the clustering organ of the spikes), has been treated by different authors (Turbin, 1969; Klionin, 1970). It has been established in the study curricula of mechanizing engineers in a number of countries, including Cuba (Martínez y Para-García (1976), y Silveira (1982). However, in the country, due to different causes, these theoretical concepts are not applied during the regulation of the windlass, losing opportunities to influence in the reduction of losses. Generally, the regulations are made following recommendations of the machine manufacturers, to which practical criteria are added, but scientific criteria are rarely applied in this regard. The recommendations given by the manufacturers can be relatively effective, although never precise, since they do not take into account, of course, the particular characteristics of each of the harvested varieties or the specific conditions under which the harvest takes place. All that conspires against the goal of minimizing losses. In Cuba, researches have been carried out aimed at increasing the effectiveness of the mechanized rice harvest (Miranda-Caballero et al., 2006; Matos et al., 2010; Morejón, 2015), however, they have been aimed at optimizing organizational aspects of the process, not including the adjustment of the regulation parameters of the working organs aimed at reducing losses. Also, no studies have been reported that provide data on the losses caused during the mechanized harvest of the grain, as well as the relative weight of the different working organs of the machines in the production of such losses.
According to De la Calle (2006), during the mechanized harvesting of rice or any other cereal with combine harvesters, improper regulation of the different working organs of the machine can lead to different types of losses in the form of loose grains of the cereal. Such losses, according to this author, can be caused by:
-
Poor regulation of the reel during cutting;
-
Low speed in shakers or because they are dirty;
-
For threshing elements, excessive feeding when the machine moves too fast or because the cutting height is too low;
-
In the cleaning elements, excessive fan speed, whose air current draws grains in addition to the straw
The losses are not always the product of the harvester’s work, they can also be natural, also called pre-harvest. Research carried out in other countries Pozzolo et al. (1998), & Hidalgo et al. (2001), report the need to reduce the levels of losses attributable to improper regulation of the machines. Pozzolo et al. (1998), report that losses in the rice harvest in Argentina are significant, with values that exceed 180 kg/ha on average, with variations of more than 50% between machines. At present, according to these authors, it is estimated that total losses should not exceed 140 kg / ha, regardless of crop yield. They also state that, the only tool available to guarantee that the harvester is set up, to both, the producer and the contractor, is to evaluate the crop losses. Knowing the value of the losses will not only allow the certainty of being inside of the limits that characterize good work, but also, if they exceed them, to detect the sources of such losses for correction. In addition, according Ochoa & Verdecia (2002), it must always be taken into account that the value of real losses is the only thing that allows adjusting the loss sensor systems with which many of the current harvesters are equipped.
Aristizabal et al. (1999), in Colombia, report that of a total loss of 11.9% in the mechanized rice harvest, 4% corresponds to the cut-off section, 6.7% to the threshing unit and 1.2% to the cleaning unit. According to Ferreira et al. (2001), losses in agriculture begin when agricultural equipment is selected and used, and when prepared and operated incorrectly, will never be efficient.
It is known that the conditions of the crop change during the harvest period, due to which the adjustments to the combined harvesters must be changed frequently if a good yield is to be achieved, which includes the losses of harvested product. According to Ferreira et al. (2001) these adjustments are not usually made by the producers and operators of combined, which increases harvest losses to high levels, representing up to 10% on average in Brazil. According to the Brazilian standard NBR 9740: 1987, crop losses should not exceed 3%. Alonso et al. (1999), during the irrigated rice crop in an area of 1 000 ha in the region of São Gabriel, State of Rio Grande do Sul (Brazil), observed average losses of around 12.5%, fluctuating between 4.5 and 23%. The objective of that work was to minimize crop losses through frequent monitoring and adjustment of the combined according to changes in crop conditions. Andrews et al. (1993) determined losses during the rice harvest under irrigation in the United States of America, ranging from 120 kg / ha to 1380 kg / ha, concluding that the main factor contributing to these losses was the feeding regime, followed by the grain / straw ratio. Pozzolo y Ferrari (2007), reported that a group of combine harvesters evaluated in Uruguay during the rice harvest had a mean loss of 226 kg / ha, with a maximum of 745 kg / ha and a minimum of 106 kg / ha. The main problems encountered, in decreasing form were: excessive winding speed, poor cylinder-concave adjustment, incorrect cutting height and excessive forward speed. Subsequent to the respective regulations, the same harvesters showed an average loss of 90.2 kg/ha, with a maximum of 110 kg/ha and a minimum of 72 kg/ha. The average yield of the crop was 7 600 kg/ha. Platero (1992), during the evaluation of 12 rice harvesters with yields between 5.4 and 7.4 kg/ha, under Uruguay conditions, obtained average losses between 5.2 and 14.7% in two consecutive harvests. This author attributes these losses to the sum of different causes, such as the regulation of harvesters, the selection of the speed of advance and not paying due attention to the supervision of the machines. Da Silva et al. (1983), during experimentation in 15 000 ha of rice in the regions of Jatai and Mineiros (Brazil), showed that the average losses of 10 harvesters in the 1981/82 harvest were 238 kg / ha or 13%, with a variation from 6.1 to 22.2%. The main losses occurred on the platform with 73.2%.
As it can be seen, according to international experience, grain losses due to poor regulation of the reel have a significant weight (approximately 33-73%) within the total losses attributable to combine harvesters, which can reach up to a 23% of the total harvested product. On the other hand, the national practice of regulating the windlass during the mechanized harvesting of rice does not include the application of scientific principles that are established internationally in the theory of agricultural machinery. Therefore, it is necessary to carry out studies where these concepts are applied, In order to perfect the harvesting process, minimizing the losses attributable to poor regulation of this work or gan, which i s the objective of this work.
Theoretical Basis for Calculating Geometrical and Kinematic Parameters of the Reel
The reel, as a constitutive organ of the cutting-feed platform (Figure 1), leads the stems to the cutting apparatus, holds or supports them at the time of cutting and directs cut stems towards the feed system (generally by Auger screw) which groups the cut mass to be raised to the threshing mechanisms (Klionin, 1970; Martínez & Para-García, 1976; Silveira, 1982).
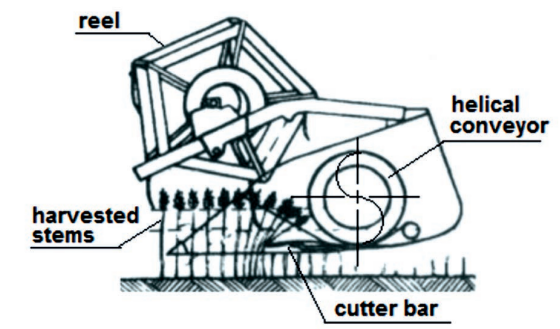
Figure 1
Reel as a Constituent Organ of the Cutting-Feed Platform
During the interaction of the reel with the mass of stems and with the other working members that make up the cuttingfeeding platform of the grain harvesters (cutting organ and conveyor system of the cut mass), a set of geometrical and kinematics parameters, as well as physical-mechanical properties of stems, spikes and grains, which should be considered during their regulation. Among these parameters, the following are of particular importance:
-
Radius of the reel blades, (Rm);
-
Number of reel blades, (Z);
-
Field yield, (Q, grains ton/ha);
-
Grain-straw composition, (β, %);
-
Machine travel speed, (Vm, m / s);
-
Working width of the cutting front of the machine, (B);
-
Machine processing capacity, (qr, kg/s of total mass);
-
Angular speed of the reel, (ω);
-
Angular speed of the reel, (ω);
-
Unit travel of the reel, (Sm);
-
Output of the reel, (c);
-
Allowable beat speed, (Vper);
-
Intensity of the beating, (Ng, beats/m);
-
Length of stems, (Ht);
-
Installation height of the cutting bar, (Hins);
-
Position of the center of gravity of the cut stem, (Lcg);
-
Height of the reel shaft, (H01);
-
Planting density (stems/m2);
-
Kinematic regime indicator, (λ);
-
Reel efficiency, (η);
The efficient working of the reel, in its interaction with the stems, the cutting organ and the feeding system, depends on a group of requirements that must be strictly carried out, in order to guarantee the reduction of the losses attributable to this work organ. A first group of requirements is related to the trajectory of the furthest points of the reel blades.
First Requirement: Adequate Selection of the Reel Working Regime
The reel blades describe a cycloid path that forms the basis for efficient performance of its function as part of the cuttingfeed platform. The shape of this trajectory and its functionality depend o n the kinematic regime indicator (λ):
 (1)
(1)Where;
Vt = ω.
Rm, is the tangential velocity of the end of the reel blades, m/s;
ω, is the angular speed of the reel, rad/s;
Rm is the radius of the end of the reel blades, m;
Vm, is the travel speed of the machine, m/s.
The ends of the reel blades describe a cycloid trajectory, product of the combination of the translational movement of the machine and the rotational movement of the reel. This trajectory is expressed as a function of time (t) through the parametric equations:
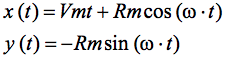 (2)
(2)where:
x( t) and y( t) are the coordinates of the reel path a long the horizontal-longitudinal and vertical axes, respectively.
Figure 2 shows the three characteristic shapes assumed by the cycloid trajectory of the reel blades, depending on the value of the kinematic regime indicator λ. It can be seen that only when the reel describes a “closed” path, the function of approaching the stems to the cutting organ, holding them during cutting and directing them towards the helical conveyor, is fulfilled.
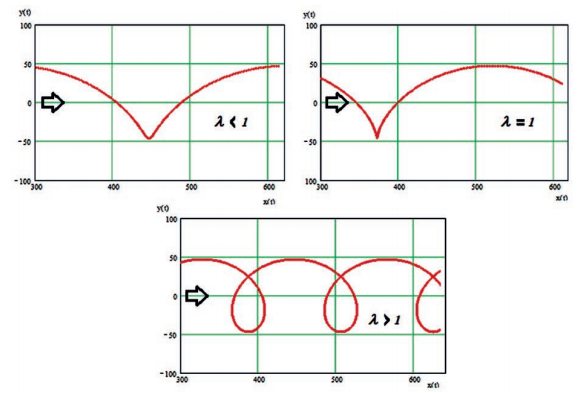
Figure 2
Characteristic Trajectories of the Reel Blades Ends
Second Requirement: Adequate Selection of the Absolute Speed Direction of the Reel Blades Ends When Making the First Contact with the Spikes
In Figure 3 the vector diagram of velocities of the end point of the reel blades (a) is shown at the instant that beats the vegetable mass.
Figure 3
Proper Condition for the Reel Penetration in the Vegetable Mass
This second requirement is aimed at achieving the minimum scratch of the spikes during the penetration of the reel in the vegetable mass to minimize losses due to this concept. It is evident that the optimum penetration condition is achieved if the direction of the absolute velocity (Vabs) at point a is vertical and downward. Therefore, any deviation from this direction will lead to further trailing of the pins, increasing the probability of causing unnecessary peeling of grains that will not be collected and will increase the losses during the harvesting process. In achieving this condition, the kinematic regime indicator (λ) and the positioning height of the reel shaft (H01) play a decisive role.
When the direction of the absolute velocity is directed vertically and downwards, the angle ϕa will be determined by:
 (3)
(3)Then, the positioning height of the reel shaft (H01) which will guarantee this condition will be given by:
 (4)
(4)Third Requirement: Adequate Selection of the Magnitude of the Speed and Frequency of Spikes Beating by the Reel Blades Ends
f Spikes Beating by the Reel Blades Ends The probability of causing the spikes to be harvested during reel action increases if the magnitude of the absolute velocity of the blade end at point a (Vabs) exceeds a certain permissible value (Vper) depending on the harvested variety and the grains moisture at the time of harvest.
This condition is given by t he expression:
 (5)
(5)Spikes threshing also depends on the frequency of beating for each meter of machine advance (Ng, strokes / m), which is the inverse of the reel pass (Sz, m) which, in turn, depends on the advance of the machine (Sm, cm) for each turn of the reel:
 (6)
(6)
 (7)
(7)The beating frequency will be a function of the kinematic regime indicator (λ), the radius (Rm) and the number of blades (Z) of the reel:
 (8)
(8)Fourth Requirement: The Cut Stems Must Not Be Thrown Off the Cutting Platform, Due to Improper Action of the Reel
In order to comply with this requirement, it must be ensured that the lowest point of the trajectory of the reel blades ends must not pass below the center of gravity of the cut stems, which can be achieved by checking that the positioning reel height (H01) is greater than the minimum height (H02) which guarantees this condition.
From Figure 3 it can be determined that:
 (9)
(9)If the positioning height of the reel shaft does not exceed this minimum value, then the cut stems could be thrown out of the technological flow of the cutting platform, increasing the losses by t his concept.
Fifth Requirement: The Reel Must Support All Stems during the Action of the Cutting Organ
The fulfillment of this requirement is evaluated by a coefficient η, which expresses the efficiency of the joint action of the reel with the cutting organ, according to Turbin (1969), & Klionin (1970) Its proper selection ensures that all the stems are cut while are supported by the reel, avoiding that some of the stems, during the cutting process, follow an arbitrary course and fall off the platform, causing the increase of losses of complete spikes. Figure 4 shows a diagram of the joint action of the reel with the cutting organ. There it is observed the theoretical width (b) of the strip of stems that are cut under the joint action of the reel with t he blades of cut
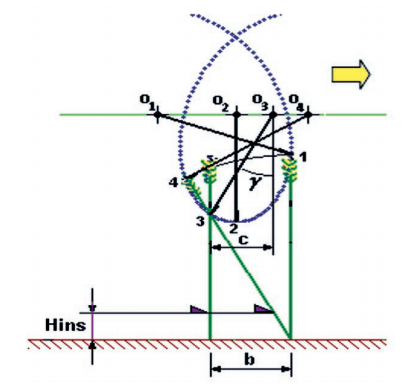
Figure 4
Joint Action of the Reel with the Cutting Organ
The coefficient η is defined as:
 (10)
(10)Where:
br = b∙ε, is the actual or effective strip of stems tha t are cut under the joint action of the reel with the cutting blades;
Being a coefficient that takes into account the mutual support be tween the stems as a function of the ir population de nsity (ρ, stems/m2).
According to the specialized literature Turbin (1969), & Klionin (1970) ε takes values between 1.0 and 1.7 according to the population density of stems, where higher values correspond to higher population density.
The width of the strip of stems (b, cm) that are cut under the propeller action of the reel is determined from Figure 4 as:
 (11)
(11)Where γ (rad) is the angle of the reel blade when the cut starts with supporting action of the reel (Figure 4):
 (12)
(12)Where:
c: output or adva ncement of the reel sha ft with r espect to the cutting organ.
Thus, from expressions 7, 10, 11 and 12, it can be seen that, the efficiency of the joint action of the reel with the cutting organ depends on the dimensions of the reel (Rm and Z). It also depends on other adjustable parameters, such as the output of the reel (c) and the kinematic regime indicator (λ), which, in turn, is a function of the speed of the machine and of the reel rotation speed.
The optimal value of the coefficient η is 1, since when η < 1 all the stems are not supported by the reel during the cut, while for η > 1 the beating frequency is increased unnecessarily.
As has been seen, compliance with the different requirements that guarantee an efficient work of the reel with the minimum of losses depends on the adequate selection of a number of parameters, which makes it difficult to select them correctly, if it is not carried out on scientific basis. In order to facilitate the calculation and adequate selection of these parameters, the different expressions that govern the operation of the reel have been programmed in Mathcad support by Martínez (2008), using this software in the development of the present work, as well as other facilities that have been implemented in Excel spreadsheets.
Figure 5 shows the dependence of η and the kinematic regime indicator, for an output c = 15 cm, a radius of the reel Rm = 47 cm and a number of blades Z = 5, corresponding to the combined C laas Crop Tiger-30, object of study.
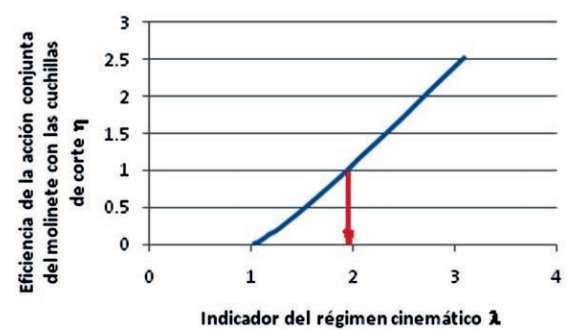
Figure 5
Influence of Kinematic Regime Indicator on Reel Efficiency
From Figure 5, it is seen that, for certain conditions, there is only one value of the kinematic regime indicator λ that satisfies the condition η = 1.
Likewise, for a given value of the tangential speed of the reel blades, the selection of the advance speed of the machine and of the output c of the reel is of great importance. It can be seen in Figure 6, where it is noticed that the speed of the machine (Vm) which guarantees an efficiency η = 1, must be selected taking into account the output c of the reel.
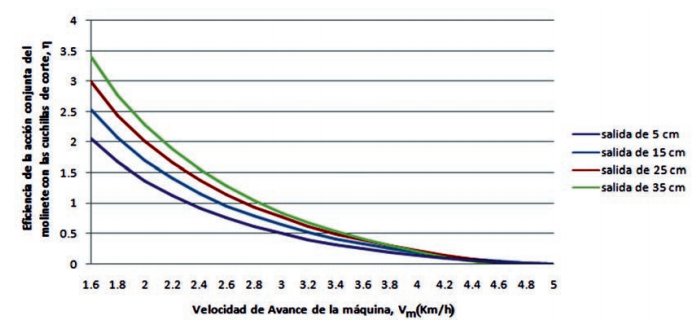
Figure 6
Influence of the Speed of Advance of the Machine and the Output of the Reel on the Efficiency Coefficient η for a Reel Radius Rm = 47 Cm, a Number of Blades Z = 5 and a Reel Rotation Speed 28 rpm.
A smaller output of the reel facilitates the evacuation of the stems and spikes of the cutting bar and its delivery to the feeder auger. However, from Fig. 2.6, it is seen that in order to keep η = 1 with a small outlet, it would be necessary to reduce the speed of advance of the machine. It provokes a decrease in productivity (qr), which is directly proportional to that speed:
 (13)
(13)Where:
B: Working width of the cutting edge of the machine, cm;
Q: Field yield, t (grains)/ha;
β: Grain-straw composition.
 (14)
(14)However, the reduction of the machine speed of advancement may be desirable from the point of view of increasing the strip of stems cut with the propeller action of the reel (Figure 7).
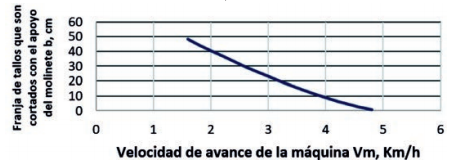
Figure 7
Influence of the Speed of Advance of the Machine on the Strip of Stems that are Cut with the Reel Support, for a Reel Radius Rm = 47 cm, a Number of Blades Z = 5, a Reel Rotation Speed 2 8 r pm and a n Output of the Reel c = 15 cm.
The output of the reel also influences the beat frequency of the spikes (blows/meter of machine advance) and to a lesser extent on the absolute speed of beating which can be seen in the graph of Figure 8. From the graph, it is deduced that, in this case, an outlet of 35 cm guarantees the maximum speed of advance and the minimum number of beats per meter. However, it is necessary to consider, that this distance can be excessive from the point of view of the evacuation of the spikes from the cutter bar.
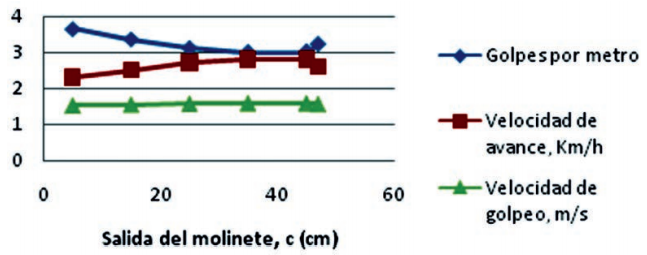
Figure 8
Influence of the Output of the Reel on the Machine Speed and the Speed and Frequency of Beating of the Spikes, for an Efficiency Coefficient η =1, a reel radius Rm = 47 cm, a Number of Blades Z = 5 and a Reel Rotation Speed 28 rpm.
The fulfillment of the different requirements presents a close interrelationship. For example, for certain geometrical and kinematic parameters of the reel and certain height of stems, there is a single value of the height of reel shaft installation that simultaneously satisfies the second and fifth requirements (Figure 9).
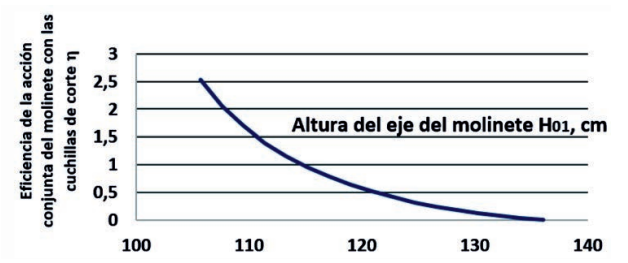
Figure 9
Influence of the Height of the Positioning of the Reel Shaft on the Efficiency of the Joint Action of the Reel with the Cutting Element, for a Reel Radius Rm = 47 cm, a Number of Blades Z = 5, a Rotational Speed o f the Reel of 28 rpm and a n Output of the Reel c = 15 cm.
As it can be seen from the above analysis, the influence of multiple interactions must be considered during the selection of reel control parameters, as well as that values variation of the different parameters can be positive in certain respects and detrimental in others. Therefore, it is necessary to make precise calculations based on the exposed geometric and kinematic relations.
METHODS
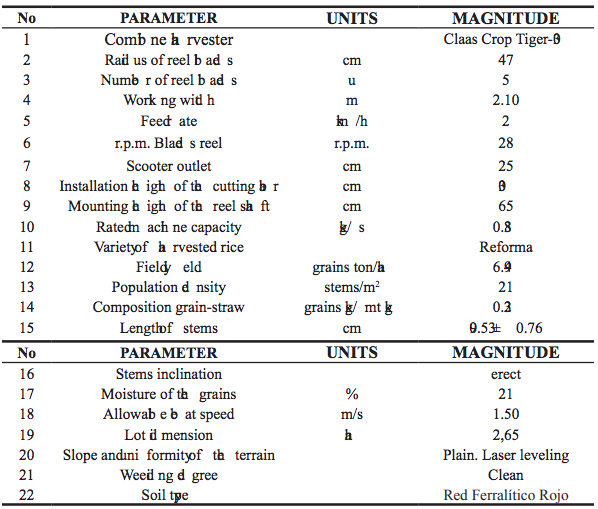
Experimental investigations were carried out during mechanized harvesting of “Reforma” variety rice under production conditions during the May-June 2015 harvest period on a plot of 2.65 ha with a yield of 6.94 t/ha. The harvested area is located in the town of Batey Nuevo, which belongs to the Agroindustrial Grain Company located in the town of Amarillas, Calimete Municipality, Matanzas Province. Harvesting was performed using a Claas Crop Tiger-30 harvester (Fig. 10) with a working width of 2.10 m.

Figure 10
Experimental Performance Conditions
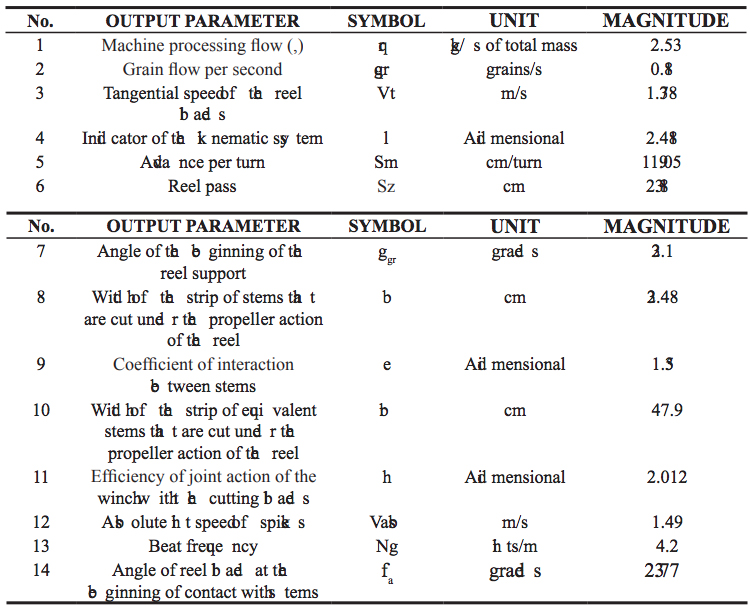
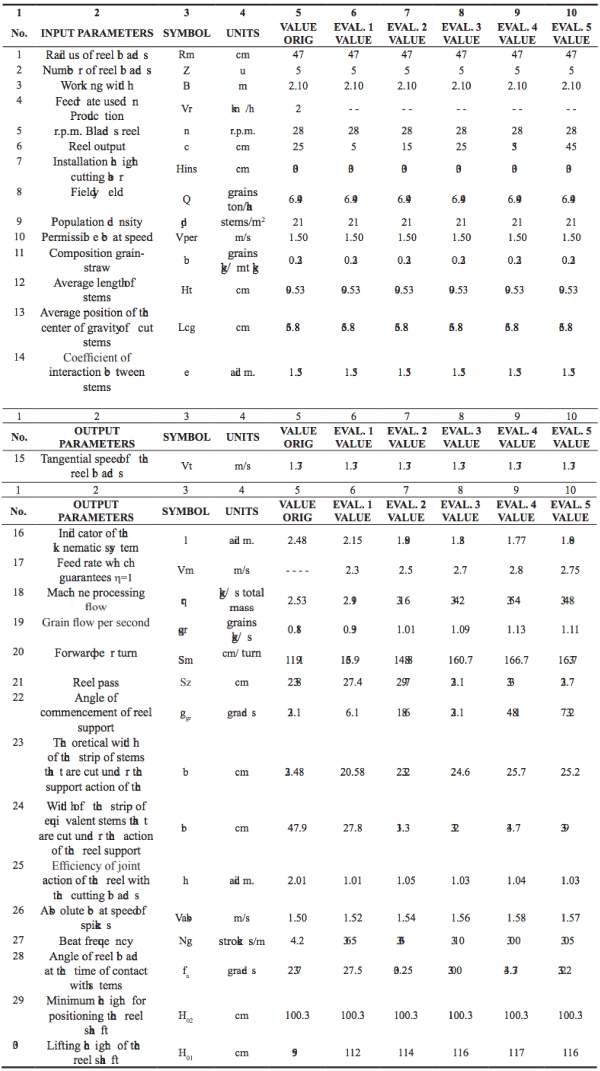
In order to establish the conditions of the experiment, a set of construction, operation and regulation parameters of the reel used in production conditions were determined, as well as the main properties of the harvested crop, which are summarized in Table 1.
RESULTS AND DISCUSSION
Figure 12 shows the trajectory of the end points of the reel blades obtained by Martínez (2008), during the run of the MOLINET program elaborated on the basis of the expressions presented in the theoretical basis.
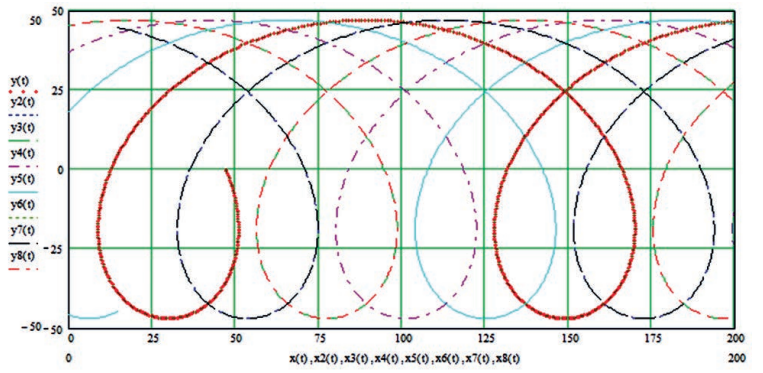
Figure 12
Trajectory of the End Points of the Reels Regulated under Production Conditions.
Because of the calculations made taking as input data to the program the construction, operation and regulation parameters of the reel used in production conditions and the properties of the harvested crop, shown in Table 2, the following results were obtained:
A graphical representation of the trajectory of the reel and its interaction with the stems and the cutting organ, obtained under the production conditions, is shown in Figure 13.
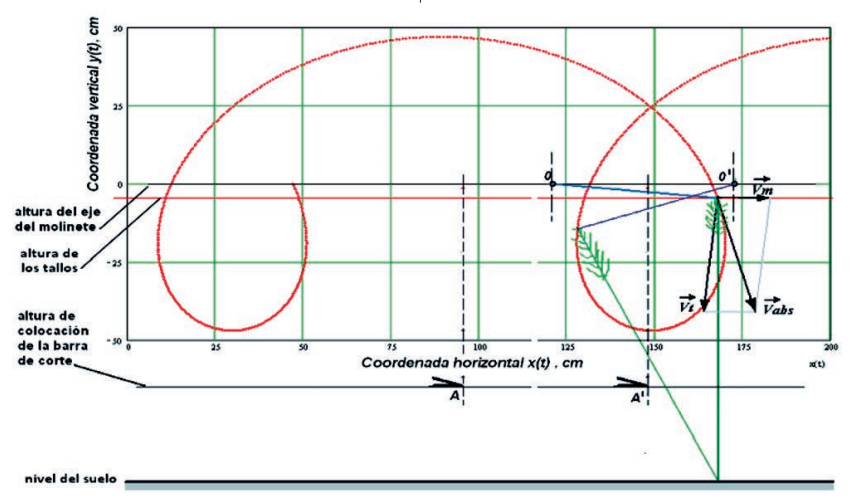
Figure 13
Trajectory of the End Points of the Reels of the Regulated Reel under Production Conditions and its Interaction with the Stems and the Cutting Organ.
In Figure 13 the vector diagram of velocities of the end point of the reel blades (a) is shown at the instant that impacts on the vegetable mass.
It can be seen that the first requirement is met since the kinematic regime indicator λ >1, however; the second requirement is not fulfilled, because the direction of the absolute velocity, at the point of incidence of the reel with the vegetable mass, does not match t he vertical.
It can also be seen from Table 2, that the efficiency coefficient of the reel, in its interaction with the cutting organ and the stems, reaches excessively high values (η = 2.012 > 1). In this case, the equivalent strip of stems that are cut under the propeller (br = 47.9 cm) is practically double the reel pass (Sz = 23.81 cm). It results in a high frequency of unnecessary beating (Ng = 4.2 beats/ m). That also conspires against compliance with the third requirement, despite the fact that the permissible beat velocity is not exceeded, since the absolute velocity at point a (1.38 m/s, Table 2) does not exceeds the allowable speed found (1.50 m/s, Table 1).
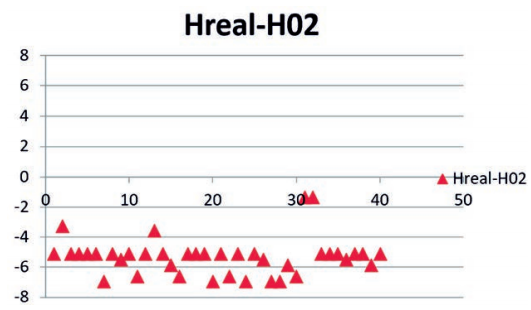
For the analysis of compliance with the fourth requirement, the installed height of the reel (H01 = 95 cm, Table 1) is com-pared with the minimum allowable height (H02 = 100.31 ± 5.01 cm, Table 2), so that the end of the reel blades do not pass below the center of gravity of the cut stems. From the comparison it is obtained that H01 <H02 (Figure 14), so that, in general, it is not guaranteed that the stems are properly directed towards the endless conveyor, with risks of increased losses occurring in this regard.
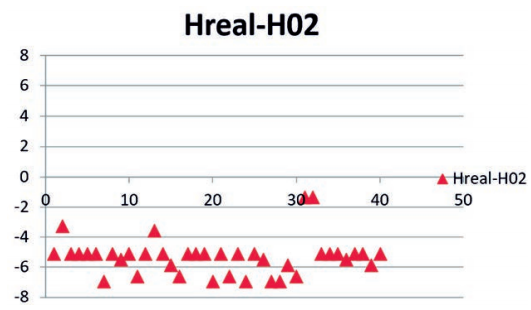
Figure 14
Position of the Reel Trajectory Lower Point in Relation to the Center of Gravity of the Cut Stems, Obtained under Production Conditions for a Sample of 40 Stems.
Regarding the reel output, the selection made under production conditions (c = 25 cm) can be considered correct, which can be seen in Figure 8.
As it can be seen from these results, most of the requirements necessary for a proper functioning of the reel are not fulfilled under the regulations used in production conditions, so it is advisable to carry out the correction of the main parameters to guarantee a reduction of losses attributable to the action of the reel.
Proposal of Operation Parameters of the Machine and Regulation of the Reel that Allow Reducing Losses Attributable to the Reel Action
The run of “MOLINET” program, using as input variables the construction parameters and properties of the harvested variety, made it possible to adjust the geometrical and kinematic parameters of the reel, in order to satisfy the different requirements that guarantee a rational operation of this organ of work. The output parameters are summarized in Table 3, which presents the results obtained in five variants evaluated in the program and their comparison with the original results (column 5) derived from the regulations applied under production conditions. Note that only the output c of the reel (row 6) has been varied i n the set of input parameters.
From Table 3 it can be seen that, in all the variants analyzed (except the original variant), a coefficient of efficiency of the joint action of the windlass with the cutter η ≈ 1 (row 25) is obtained when similar values are obtained (Row 24), and the pass of the reel Sz (row 21), the beat frequency of the spikes Ng (row 27) being reduced by approximately one beat per meter of advance of the machine, without excessive lifting of the blade (1.52 to 1.58 m / s, row 26. Therefore, in all the variants evaluated, the fifth and third requirements set out in the theoretical basis of the calculation of the reel parameters are met.
It is also important to note that all variants evaluated in turn satisfy the second requirement, ensuring that the absolute velocity at the point of commencement of the reel contact with the spikes is directed downwards and in the vertical direction. In Figure 15, a graphic sample of the fulfillment of this requirement is presented for the variant with o utput of the reel c = 15 cm.
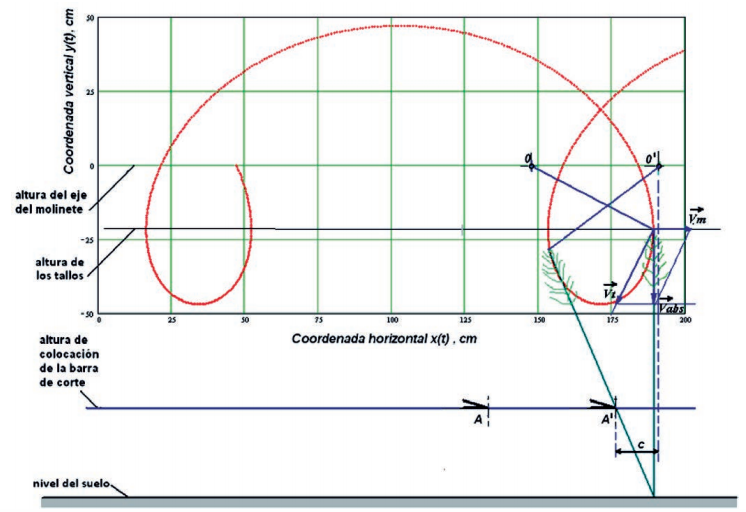
Figure 15
Trajectory of the End Points of the Reel Blades and Their Interaction with the Stems and the Cutting Organ, Corresponding to Regulation No. 2 According to Table 3.
It is also ensured that the first requirement is complied with, in all variants evaluated, values of the kinematic regime indicator λ > 1, describing the reel a “closed” trajectory, fulfilling the function of approaching the stems to the organ of cut, hold them during the cut and direct them towards the auger.
For the analysis of compliance with the fourth requirement, the installed height of the reel in the different proposed variants (H01=112-116 cm, Table 3, row 30) is compared with the minimum permissible height (H02=100.31 ± 5.01 cm, Table 3, Row 29). In the case of the lower installation height variant (H01=112 cm), it is obtained that the end of the reel blade passes over the center of gravity of the cut stems (Figure 16).
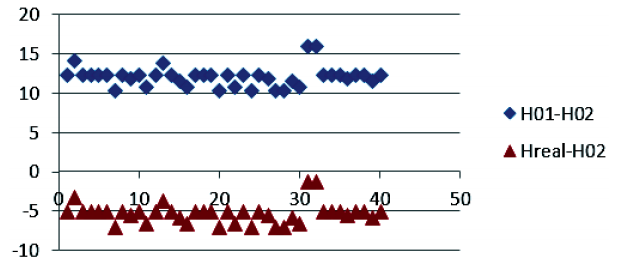
Figure 16
Position of the Lower Point of the Reel Trajectory Relative to the Center of Gravity of the Cut Stems for the Proposed Lower Version of the Reel Shaft (H01-H02), Compared to the Result Obtained under Production Conditions -H02) for a Sample of 40 Stems.
CONCLUSIONS
• As a result of the calculations made taking as input data to “MOLINET” program the construction, operation and regulation parameters of the reel used in production conditions and the properties of the harvested crop, it was determined that most of the requirements for a proper functioning of the reel, so it is advisable to carry out the correction of the main parameters to guaranteeing a reduction of losses attributable to the action of this organ of work;
• Four proposals for variants of correct regulation of the harvester reel under study (with different outputs with respect to the cutting bar) were prepared, which satisfy the five requirements that guarantee a correct operation of this work organ, as well as as a minimum losses. These variants contemplate the reduction of the indicator of the kinematic regime (between 2.15 and 1.80), which is achieved by increasing the speed of advance of the harvester between 2.30 and 2.75 m/s, as well as raising the height for positioning the reel shaft between 112 and 116 cm.
REFERENCES
ALONSO, A.; MACHADO, A.L.T.; DOS REIS, R.L.T.; MACHADO, C.A.; TILLMANN, D.F.; TAESCHER, C.F.: “Harvest loss in the irrigated rice crop with the combine operating with two kinds of header”, En: Brazilian Congress of Agricultural Engineering, Ed. Associação Brasileira de Engenharia Agrícola (SBEA), Brasil, p. 28, 1999.
ANDREWS, S.B.; SIEBENMORGEN, T.J.; VORIES, E.D.; LOEWER, D.H.; MAUROMOUSTAKOS, A.: “Effects of Combine Operating Parameters on Harvest Loss and Quality in Rice”, Transactions of the ASAE, 36(6): 1599-1607, 1993, ISSN: 2151-0059, DOI: 10.13031/2013.28501.
ARISTIZABAL, Q.J.; BAQUERO, P.J.E.; REY, V.V.E.; ACOSTA, N.: “El entorchamiento del arroz en suelos de los Llanos Orientales de Colombia”, Revista Corpoica, 23(3), 1999, ISSN: 0122-8706, 2500-5308, Disponible en: http://bibliotecadigital.agronet.gov.co/bitstream/11348/6415/2/El%20entorchamiento%20del%20arroz.pdf, [Consulta: 18 de marzo de 2016].
COMITÊ AGRICULTURA E PECUÁRIA: Colhedora autopropelida de grãos - Determinação das características técnicas e de desempenho, [en línea], no. NBR 9740, Inst. Target Engenharia e Consultoria Ltda., Brasil, p. 14, 1987, Disponible en: https://www.target.com.br/produtos/normas-tecnicas/35179/nbr9740-colhedora-autopropelida-de-graos-determinacao-das-caracteristicas-tecnicas-e-de-desempenho, [Consulta: 18 de marzo de 2016].
DA SILVA, J.G.; FONSECA, J.R.; DE CONTO, A.J.: Perdidas de Granos en Cosecha Mecanizada de Arroz, Inst. EMBRAPA, Goiânia, Brasil, 1983.
DE LA CALLE, V.P.: “Mantenimiento y regulación de la cosechadora de cereales”, Vida rural, (232): 35-37, 2006, ISSN: 1133-8938.
FERREIRA, D.B.; FERREIRA, O.O.; ALONCO, A.S.; BLEY, H.: Grain Loss Monitoring During allHarvest Season (Gathering and Processing Losses), in the Irrigated Rice Crop, and its Results in Reduction Losses Due to Immediate Adjustments in the Combines, [en línea], no. 011075, Inst. ASAE, Annual International Meeting, Sacramento, California, USA, 2001, Disponible en: http://confnews.um.ac.ir/images/41/conferences/8ncame/305_2.pdf, [Consulta: 6 de septiembre de 2016].
GONZÁLEZ, T.A.: Informe anual, Arroz, Inst. Instituto de Investigaciones del Arroz, La Habana, Cuba, 2011.
GROGG, P.: “Alimentación: Ayuda para mejorar producciones de arroz”, [en línea], En: Inter Press Service, 2005, Disponible en: http://www.ipsnoticias.net/2005/05/alimentacion-ayuda-para-mejorar-producciones-de-arroz/, [Consulta: 6 de septiembre de 2016].
HIDALGO, R.; MIRON, M.; POZZOLO, O.; FERRARI, H.; CURRÓ, C.: Análisis de diferentes aspectos relacionados con la Eficiencia en la Cosecha de Arroz, [en línea], Inst. INTA, Informes Técnicos, Argen, 2001, Disponible en: http://www.cosechaypostcosecha.org/data/articulos/cosecha/EficienciaCosechaDeArroz.asp, [Consulta: 6 de septiembre de 2016].
KLIONIN, N.I.: Teoria Sielcojosiaistsviennix Machin, Ed. MIR, Moscú, Rusia, 1970.
MARTÍNEZ, A.: MOLINET-2: Software para la determinación de parámetros adecuados de regulación del molinete en máquinas cosechadoras de cereales (Con Animación), no. Registro CENDA 2802, Inst. CENDA, La Habana, Cuba, 2008.
MARTÍNEZ, R.A.; PARA-GARCÍA, J.L.: Teoría de Máquinas Cosechadoras, Ed. Facultad de Tecnología, Instituto Superior Politécnico José A. Echevarría, vol. 2, La Habana, Cuba, 1976.
MATOS, R.N.; GARCÍA, C.E.; GONZÁLEZ, G.J.R.: “Evaluación técnica y de explotación de las cosechadoras de caña Case-7 000”, Revista Ciencias Técnicas Agropecuarias, 19(4): 06-09, diciembre de 2010, ISSN: 2071-0054.
MIRANDA-CABALLERO, A.; IGLESIAS-CORONEL, C.E.; RIVERO-FIGUEROA, R.; LUZARDO FALCÓN-CHIRINO: “Análisis de la calidad del arroz cosechado con las cosechadoras New Holland L520 e Ideal International 9075”, Revista Ciencias Técnicas Agropecuarias, 15(3): 56–59, 2006, ISSN: 1010-2760, 2071-0054.
MOREJÓN, Y.: Determinación de la composición racional del complejo cosecha-transporte del arroz con la aplicación de la teoría del servicio masivo en la empresa agroindustrial de granos “Los Palacios”, Universidad Agraria de La Habana «Fructuoso Rodríguez», Tesis de Doctorado, Mayabeque, Cuba, 2015.
OCHOA, R.; VERDECIA, D.: “Novedades y tendencias actuales en la construcción de las cosechadoras de cereales a nivel mundial”, Natura, 10: 63-69, 2002.
PLATERO, A.: Determinación de pérdidas en la cosecha del arroz durante las zafras 1986/87 y 1987/88, Arrozal 33, ser. Boletín de Divulgación, no. ser. 18, Ed. INIA, Uruguay, Comunicación Personal, 1992.
POLÓN-PÉREZ, R.; CASTRO-ÁLVAREZ, R.; RUIZ-SÁNCHEZ, M.; MAQUEIRA-LÓPEZ, L.A.: “Práctica de diferentes alturas de corte en el rebrote y su influencia en el rendimiento del arroz (Oryza sativa L.) en una variedad de ciclo medio”, Cultivos Tropicales, 33(4): 59-62, diciembre de 2012, ISSN: 0258-5936.
POZZOLO, O.; FERRARI, H.: “Resultados de las Evaluaciones de Pérdidas de Cosecha en Arroz en Concepción del Uruguay”, [en línea], En: PRECOP, 2007, Disponible en: http://www.cosechaypostcosecha.org/data/articulos/cosecha/ResultadosEvaluacionesPerdidasCosechaArrozConcepcion.asp, [Consulta: 18 de marzo de 2016].
POZZOLO, O.; FERRARI, H.; HIDALGO, R.; MIRÓN, M.: “Control de pérdidas en cosecha de arroz”, [en línea], En: PRECOP, 1998, Disponible en: http://www.cosechaypostcosecha.org/, [Consulta: 18 de marzo de 2016].
SILVEIRA, R.J.A.: Teoría y Cálculo de Máquinas Agrícolas, Ed. Pueblo y Educación, La Habana, Cuba, 420 p., 1982, ISBN: 978-959-13-0228-1.
TURBIN, V.I.: Teoria y ConstruksiaSielcojosiaistviennixMachin, Ed. Kolos, Moscú, Rusia, 1969.
Notes