Artículos
Recepción: 21 Enero 2022
Aprobación: 03 Marzo 2022
DOI: https://doi.org/10.18273/revuin.v21n2-2022011
Resumen: En este artículo se presenta una metodología de solución para la estimación de parámetros de transformadores monofásicos considerando las mediciones de tensión y corriente; para ello se emplea un modelo de optimización no lineal. Este modelo se basa en minimizar el error cuadrático medio entre las variables de tensión y corriente medidas y calculadas. Este modelo de programación no lineal se resuelve mediante la implementación del algoritmo de optimización de las salpas. Los resultados obtenidos demuestran que el método de optimización propuesto permite reducir el error entre la estimación de las variables medidas y calculadas; además, el método de optimización propuesto mejora los resultados presentados por otros métodos de optimización reportados en la literatura especializada. Todas las simulaciones se realizaron en el entorno de programación MATLAB.
Palabras clave: estimación paramétrica en transformadores, circuito equivalente, transformadores monofásicos, modelo de programación no lineal, algoritmo de optimización por enjambre de salpas, mediciones de tensión y corriente, error medio cuadrático, optimización metaheurística, técnicas de comparación, desempeño numérico.
Abstract: This article presents a solution methodology for the estimation of parameters of single-phase transformers considering the measurements of voltage and current, for which a non-linear optimization model is used. This model is based on minimizing the mean square error between the measured and calculated voltage and current variables. This nonlinear programming model is solved by implementing the Salp swarm optimization algorithm. The results obtained show that the proposed optimization method allows reducing the error between the estimation of the measured and calculated variables; in addition, the proposed optimization method improves the results presented by other optimization methods reported in the specialized literature. All the simulations were performed in the MATLAB programming environment.
Keywords: parametric estimation in transformers, equivalent circuit, single-phase transformers, nonlinear programming model, Salp Swarm optimization algorithm, voltage and current measures, mean square error, metaheuristic optimization, comparison techniques, numerical performance.
Nomenclatura
C1 Parámetro que equilibra la exploración y la explotación en el espacio de soluciones.
C2 Número aleatorio en el rango de 0 a 1 con distribución uniforme.
C3 Número aleatorio en el rango de 0 a 1 con distribución uniforme.
Ip Corriente en el devanado primario (A).
ip Corriente medida a la entrada del transformador (A).
Is Corriente en el devanado secundario (A).
I’s Corriente en el devanado secundario referida al lado primario (A).
Np Número de espiras del devanado primario (vueltas).
Ns Número de espiras del devanado secundario (vueltas).
Ni Número de individuos que conforman la población inicial.
Nv Número de variables de decisión del problema de optimización.
Rc Resistencia de pérdidas en el núcleo (Ω).
Rcmáx Límite máximo para la resistencia de magnetización (Ω).
Rcmín Límite mínimo para la resistencia de magnetización (Ω).
RL Resistencia equivalente de carga (Ω).
Rp Resistencia de pérdidas del devanado primario (Ω).
Rpmáx Límite máximo para la resistencia serie del devanado primario (Ω).
Rpmín Límite mínimo para la resistencia serie del devanado primario (Ω).
Rs Resistencia de pérdidas del devanado secundario (Ω).
R'smáx Límite máximo para la resistencia serie del devanado secundario referido al primario (Ω).
R’smín Límite mínimo para la resistencia serie del devanado secundario referido al primario (Ω).
R’s Resistencia de pérdidas del devanado secundario referida al lado primario (Ω).
Slt Matriz de soluciones en la iteración t (i. e., cadena de salpas).
Sltbest Mejor solución contenida en la población para la iteración t.
Slti,j Componente de la salpa ubicada en la posición en la iteración t.
Sltldr Salpa líder en la iteración t.
t Contador de iteraciones.
tmáx Número máximo de iteraciones.
Vp Tensión aplicada al devanado primario (V).
Vs Tensión aplicada al devanado secundario (V).
Vs' Tensión aplicada al devanado secundario referida al lado primario (V).
Vs' Tensión medida en el lado secundario del transformador referida al lado primario (V).
Xm Reactancia de magnetización del núcleo (Ω).
Xmmáx Límite máximo para la reactancia de magnetización (Ω).
Xmmín Límite mínimo para la reactancia de magnetización (Ω).
Xp Reactancia de dispersión del devanado primario (Ω).
Xpmáx Límite máximo para la reactancia serie del devanado primario (Ω).
Xpmín Límite mínimo para la reactancia serie del devanado primario (Ω).
Xs Reactancia de dispersión del devanado secundario (Ω).
X’smáx Límite máximo para la reactancia serie del devanado secundario referido al primario (Ω).
X’smín Límite mínimo para la reactancia serie del devanado secundario referido al primario (Ω).
X’s Reactancia de dispersión del devanado secundario referida al lado primario (Ω).
ymáx Vector que contiene los límites máximos del espacio de soluciones.
ymín Vector que contiene los límites mínimos del espacio de soluciones.
z Valor de la función objetivo.
Zm Impedancia equivalente de la rama de magnetización (Ω).
Zp Impedancia serie equivalente del lado primario (Ω).
Z's Impedancia serie equivalente del lado secundario referida al lado primario (Ω).
1. Introducción
El transformador es un equipo esencial en el sistema eléctrico y se considera un eslabón vital en la cadena de dispositivos utilizados para suministrar energía eléctrica, ya que se encarga de interconectar los puntos de generación y demanda [1], [2]; por ello, es necesario que la operación del transformador sea fiable y continua para suplir la demanda de los usuarios sin interrupciones [3], [4].
Dada la importancia que tienen los transformadores en el suministro de energía eléctrica a los usuarios finales en media y baja tensión, un escenario crítico para una empresa distribuidora se da cuando este dispositivo falla por causas internas o externas. Una falla interna puede ocasionarse por el deterioro del aislamiento o por el degradamiento del fluido refrigerante; por otro lado, una falla externa puede ocurrir en el área circundante del transformador, como uncortocircuito o una falla mecánica en la estructura de soporte. En cualquiera de estos escenarios, se tiene una salida de funcionamiento del transformador (salida no programada), la cual puede afectar cargas críticas en el sistema de distribución [5], [6].
Con el fin de evitar las fallas internas en los transformadores de distribución, es recomendable realizar evaluaciones del estado operativo de este dispositivo de manera periódica en su lugar de operación, es decir, sin afectar a los usuarios finales que se encuentran allí conectados. Este tipo de evaluaciones permitirán detectar posibles fallas y tomar acciones preventivas y correctivas, con el fin de evitar fallas prolongadas en el suministro eléctrico [7], [8].
Por otro lado, dada la importancia que tienen los transformadores en el sistema eléctrico de potencia, y en especial en los sistemas de distribución de energía, es fundamental para las empresas distribuidoras contar con un modelo preciso de los equipos y elementos que componen sus redes de distribución, ya que estos modelos son esenciales en las etapas de planeación, operación y mantenimiento de las redes [9], [10].
Debido a que los estudios que involucran simulaciones en sistemas eléctricos requieren de un modelado preciso de los componentes de la red, especialmente, transformadores, líneas de distribución y cargas, se hace necesario el desarrollo de metodologías que permitan conocer dichos parámetros en el sitio de operación de estos elementos. Por lo anterior, en el caso de los transformadores monofásicos, se emplean metodologías de optimización fundamentadas en las medidas de tensión y corriente a la entrada y salida del transformador, para estimar sus parámetros eléctricos [9], [11].
La principal ventaja de las medidas eléctricas tomadas en terreno corresponde a la continuidad del servicio eléctrico, ya que los usuarios no se ven afectados por interrupciones en el servicio de electricidad [12], [13].
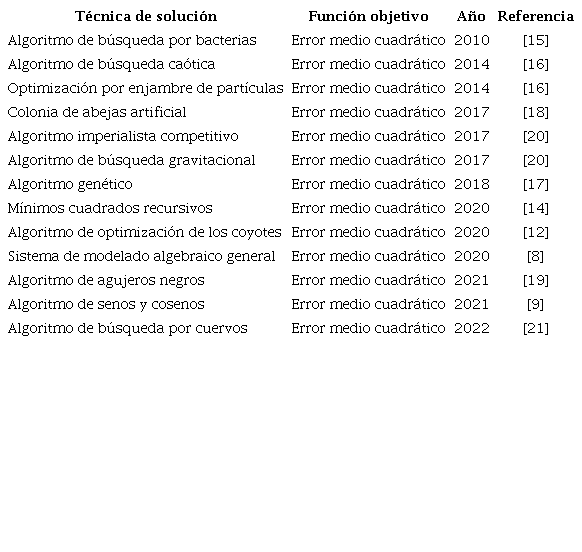
En la literatura especializada, el problema de estimación de parámetros del transformador ha sido resuelto a través de numerosos algoritmos de optimización entre los cuales están el método de mínimos cuadrados [14], algoritmo de búsqueda de bacterias [15], algoritmos genéticos [16], algoritmo de optimización por enjambre de partículas [17], algoritmo de colonia de abejas artificial [18], algoritmo de búsqueda caótica [16], algoritmo de agujeros negros [19] y algoritmo de senos y cosenos [9], entre otros. La principal característica de estos métodos de optimización corresponde al uso de estrategias de optimización combinatorial para resolver el modelo que representa la estimación paramétrica en transformadores, ya que este modelo es de naturaleza no lineal y no convexa, lo que dificulta su solución con herramientas de optimización convencional [8].
A manera de resumen, en la tabla 1 se presentan las principales características de los métodos de optimización presentados anteriormente para la estimación de parámetros en transformadores de distribución. Las principales características de los métodos de optimización presentados en la tabla 1 son las siguientes: (i) todas las metodologías emplean como indicador de desempeño, i. e., función objetivo, el error medio cuadrático; (ii) el 90,90 % de las metodologías exploradas son de origen combinatorial, i. e., se basan en métodos de optimización metaheurística para resolver el problema de optimización, debido a su naturaleza no convexa; y (iii) el método de optimización por salpas no ha sido previamente aplicado a este problema.
Características de las metodologías de solución aplicadas al problema de estimación paramétrica en transformadores monofásicos
Por lo anterior, en este trabajo se propone el uso del algoritmo de optimización de salpas (SSA, por sus siglas en inglés), para la estimación de parámetros en transformadores monofásicos a partir de los valores de tensión y corriente medidos, realizando la evaluación de una función objetivo basada en la minimización del error cuadrático medio entre los valores medidos y los calculados.
A continuación, se definen los principales aportes del artículo de investigación realizado en torno a la solución del problema de optimización:(i) la aplicación del SSA al problema de estimación de parámetros en transformadores monofásicos a partir de las mediciones de tensión y corriente en los devanados del transformador; y (ii) la mejora de las soluciones obtenidas previamente en la literatura especializada para el problema de estimación de parámetros en transformadores monofásicos con algoritmos de optimización como optimización por enjambre de partículas, algoritmos genéticos, algoritmo competitivo imperialista, algoritmo de búsqueda gravitacional y algoritmo de agujeros negros [19].
El resto del documento se compone de la siguiente manera: la sección 2 presenta la formulación matemática del problema de estimación de parámetros en transformadores monofásicos a partir de las medidas de tensión y corriente. La sección 3 presenta la metodología propuesta para la solución del problema presentado a partir de la implementación del algoritmo de optimización propuesto. En la sección 4 se presentan los tres transformadores seleccionados para verificar la metodología propuesta. La sección 5 evidencia los resultados obtenidos con la metodología propuesta y la comparación realizada con métodos de optimización previamente utilizados en la literatura especializada, además, de un análisis complementario de los resultados obtenidos con el fin de demostrar la viabilidad de este. Finalmente, la sección 6 muestra las principales conclusiones obtenidas y algunos posibles desarrollos futuros.
2. Modelado matemático
La formulación matemática para la estimación de parámetros de transformadores monofásicos, cuyo equivalente eléctrico se muestra en la figura 1, se realiza a partir del modelo eléctrico equivalente expuesto en la figura 2 [21].
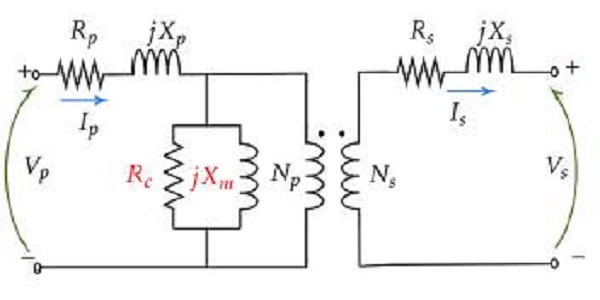
Figura 1
Circuito equivalente transformador no ideal.
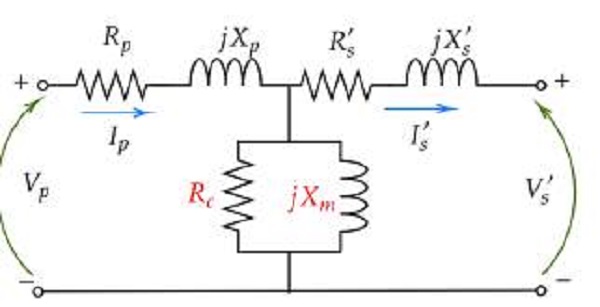
Figura 2
Circuito equivalente transformador mediante su representación tipo T.
En el equivalente eléctrico de la figura 1 se muestran los parámetros que conformar un transformador monofásico no ideal. Las resistencias Rp y Rs, junto con las reactancias Xp y Xs de las ramas en serie, representan las pérdidas por efecto Joule y los flujos de dispersión de cada uno de los devanados del transformador, respectivamente [8].
Aplicación del algoritmo de optimización por enjambre de salpas para la estimación de parámetros en transformadores monofásicos empleando medidas de tensión y corriente
Por otro lado, la resistencia Rc y reactancia Xm en paralelo de la rama de magnetización representan las pérdidas en el núcleo y el flujo de magnetización, mientras que  es la relación entre el número de espiras del primario y secundario del transformador, es decir, la relación de transformación del mismo [22].
es la relación entre el número de espiras del primario y secundario del transformador, es decir, la relación de transformación del mismo [22].
En la figura 2 se muestra Rp y Xp que son los parámetros del primario del transformador, Rc y Xm como los parámetros de la rama de magnetización, Rs yXs como los parámetros del secundario del transformador referidos al primario. Asimismo, Vp, Ip, Vs y Ts representan las variables eléctricas del transformador, las cuales serán empleadas para determinar la solución del problema de estimación de parámetros en transformadores monofásicos [19].
Teniendo en cuenta que la solución del problema de optimización se basa en determinar los parámetros del transformador a partir de las variables eléctricas, las cuales pueden ser calculadas a través del modelo eléctrico mostrado en la figura 2, se utilizan las leyes de Kirchhoff, considerando que hay una carga RL conectada en las terminales del secundario del transformador [19], [12].
Para empezar con el análisis, se considera la impedancia total, vista desde los terminales del primario del transformador, como se evidencia en la ecuación 1.
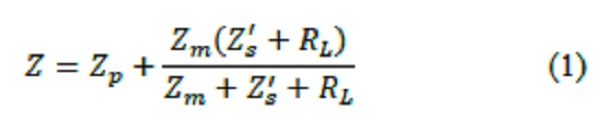
Donde Zp= Rp+ jXpyZ's= R's+ jX's son las impedancias equivalentes del primario y secundario del transformador, y  es la impedancia equivalente de la rama de magnetización.
es la impedancia equivalente de la rama de magnetización.
La corriente que circula por el primario Ip se define a partir de la impedancia total y la tensión de entrada del transformador, como se muestra en la ecuación 2.

La corriente que circula por el secundario del trans formador se define según la ecuación 3.

Teniendo la corriente I's, se calcula la tensión V's que está en el secundario del transformador como se define en la ecuación 4.

Finalmente, para resolver el problema de estimación de parámetros del transformador, se define una función cuadrática que determina el error entre los valores medidos y calculados de las variables eléctricas consideradas para dar solución al problema de optimización, como se define en la ecuación 5, según lo recomendado por Arenas et al. [19].
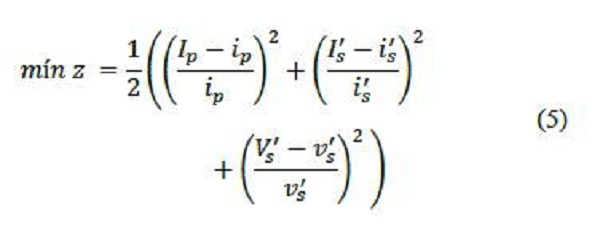
Donde la función z es el error cuadrático que se busca minimizar; ip, i's y v's son las corrientes y tensiones medidas; Ip, I's y V's son las corrientes y tensiones calculadas.
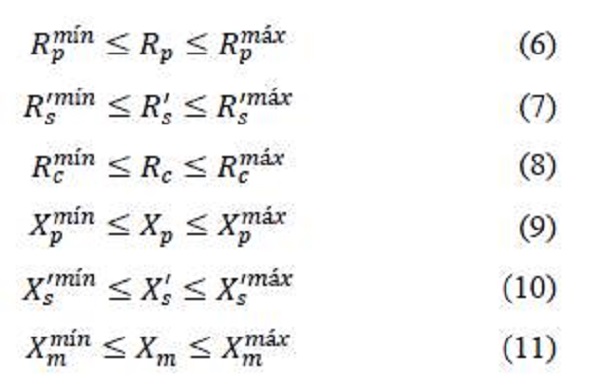
El conjunto de restricciones para el problema de estimación de parámetros en transformadores monofásicos se define desde la ecuación 6 hasta la 11. Estas restricciones limitan los valores máximos y mínimos que puede tomar cada uno de los parámetros del transformador. Nótese que estos valores se definen considerando variaciones entre el 20 % y el 50 % de los valores nominales del transformador.
3. Metodología de solución: algoritmo de optimización por enjambre de salpas
El algoritmo de salpas es una técnica de optimización basada en el comportamiento de las salpas, estos son animales muy similares a las medusas tanto en apariencia como en comportamiento, debido a que su cuerpo es transparente, tienen forma de barril, sus tejidos son muy similares a los de las medusas y su movimiento en el agua se basa en el bombeo de esta a través de su cuerpo [23], [24].
La característica determinante para que el comportamiento de las salpas sea considerado para solucionar problemas de optimización es que las salpas son animales que conviven en enjambres debido a las condiciones de su entorno, ya que de esta manera se pueden desplazar más fácilmente al formar cadenas entre ellas y acceder a zonas de difícil acceso para alimentarse; esta conducta de formar cadenas para desplazarse ha sido estudiada dado que la realizan de forma rápida y armoniosa [25], [23]. Adicionalmente, es importante mencionar que la cadena de salpas posee la habilidad de moverse hacia la mejor fuente de alimento, la cual cambia continuamente, esto con el objetivo de encontrar una mejor solución al explorar y explotar el espacio de solución [26]. Las principales características del algoritmo de optimización basado en el comportamiento de las salpas son [27]:
-
La actualización de la población de cada individuo en cada iteración tiene en cuenta la mejor solución obtenida hasta el momento.
-
La actualización de la posición del líder de la población se da respecto a la mejor fuente de alimento en cada iteración, lo cual permite que el líder explore y explote el espacio de solución a su alrededor.
-
El movimiento de las salpas se basa en dos comportamientos, esto permite que el algoritmo no se estanque en óptimos locales.
A continuación, se presentan las etapas en las que se desarrolla el SSA.
3.1. Población inicial
Se define la población inicial de la cadena de las salpas de forma aleatoria a partir de la ecuación 13, donde cada salpa es una posible solución al problema de optimización (i. e., una fila dentro de la matriz) [28].
Siendo
Donde Slti es la salpa, yimín y yimáx son los límites inferior y superior del espacio de solución, n es el número de individuos de la población y t es el número de iteraciones. Nótese que cada una de las salpas definidas como Slti contiene los parámetros de solución para el problema de optimización.
Seguido a la formación de la población inicial, se evalúa cada una de las salpas en la función objetivo definida en la ecuación 5 y se determina cuál es la mejor salpa (ver ecuación 14); la salpa que provea el mejor resultado para la función objetivo en cada iteración será definida como la líder de la población.

3.2. Movimiento de las salpas
Para el movimiento de las salpas, la población se divide en dos componentes, los cuales son movimiento en relación al líder y movimientos entre seguidores. El líder es la salpa que obtuvo la mejor solución en la iteración actual y es aquella que se ubica al principio de la cadena de salpas; esta es responsable de guiar el movimiento de las demás salpas de la población en búsqueda de la fuente de alimento [29]. La actualización del líder de las salpas se da en cada iteración dependiendo del movimiento realizado y el resultado de la función objetivo al evaluar cada uno de los individuos de la población.
3.2.1. Caso 1: movimiento en relación con la posición
Este movimiento comienza desde el líder de la cadena hasta la mitad de la misma, es decir, se da en la mitad de la población del enjambre de salpas, generando un movimiento aleatorio que tiene en cuenta las restricciones del problema de optimización. Esto permite que se realice una exploración adecuada del espacio de solución alrededor del líder [25]. Este movimiento se formula matemáticamente según lo expresado en la ecuación 15:
Donde Slti es la posición del líder dentro del espacio de solución, Fi es la fuente de alimento en este espacio de solución, yjmin y yjmáx son los límites inferior y superior del espacio de solución, C2 y c3 son valores generados aleatoriamente en el rango de [0,1]. El parámetro cl esta definido según la ecuación 16 y se encarga de mantener el equilibrio entre la exploración y explotación del espacio de solución [23].

Donde t y tmáx definen la iteración y número máximo de iteraciones, respectivamente.
3.2.2. Caso 2: movimiento empleando la tercera ley de Newton
Este movimiento se da para la población restante, es decir, la población que está desde la mitad de la cadena hasta el final de la misma; para ello se utiliza la tercera ley del movimiento de Newton para representar el movimiento de las salpas seguidoras (ver ecuación 17). Este movimiento se basa en compartir la información de la salpa adyacente y así generar nuevas ubicaciones en el espacio de solución [28].
Donde Si,j muestra la posición de la salpa i en la dimensión j.
3.3. Actualización del líder
La actualización del líder y de los seguidores se realiza a partir de las ecuaciones 15 y 17, con las cuales se modifica la posición del líder y de los individuos. Finalmente, se define al nuevo líder como aquel individuo que provee la mejor solución objetivo en esa iteración.
En el algoritmo 1 se presenta la implementación del algoritmo de optimización de las salpas para resolver el problema de estimación de parámetros de transformadores monofásicos [25].
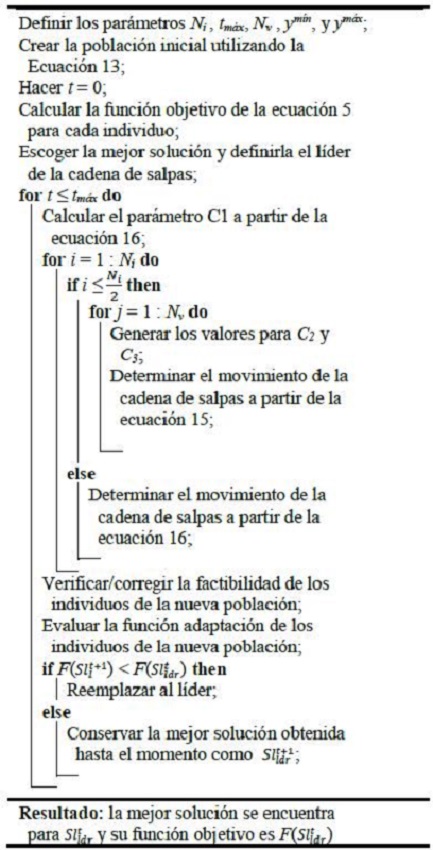
Algorithm 1
Algoritmo de optimización por enjambre de salpas para resolver problemas de optimización.
4. Transformadores monofásicos de prueba
Para resolver el problema de estimación de parámetros de transformadores a partir del SSA, se tomaron tres transformadores monofásicos. Los parámetros de estos transformadores fueron tomados de [16], [20], y los resultados obtenidos con el algoritmo presentado se compararon con los resultados reportados con diferentes métodos de optimización utilizados en la literatura especializada [19]. Los transformadores empleados para resolver el problema de optimización son:
Para solucionar el problema de optimización, se implementó y resolvió el algoritmo en el software MATLAB®, en un equipo de cómputo que cuenta con las siguientes características: Intel(R) Core(TM) i57200U CPU @2,50 Ghz, RAM de 8,00 GB y Windows 10 Home Single Language 64-bit como sistema operativo.
-
Transformador de 4 kVA, 250/125 V y 50 Hz.
-
Transformador de 10 kVA, 500/125 V y 50 Hz.
-
Transformador de 15 kVA, 2400/240 V y 50 Hz.
5. Validaciones numéricas
En esta sección se muestran los resultados obtenidos al emplear el algoritmo de las salpas para estimar los parámetros de los transformadores seleccionados y la comparación realizada con otros métodos de optimización, los cuales son: optimización por enjambre de partículas (PSO) [16], algoritmo genético (GA) [16], algoritmo competitivo imperialista (ICA) [20], algoritmo de búsqueda gravitacional (GSA) [20] y el algoritmo de optimización de agujeros negros (BHO) [19]. Estos algoritmos han sido seleccionados como métodos comparativos, ya que de los reportados en la sección introductoria son los que presentan mejor desempeño numérico y han sido los puntos de referencia para nuevas metodologías de optimización como la reportada por Arenas et al. en [19].
Con el fin de comparar el rendimiento del SSA respecto a los algoritmos que han sido empleados previamente en la literatura especializada, se utilizaron 10 individuos, 1000 iteraciones y 100 evaluaciones consecutivas del algoritmo para determinar la desviación estándar de la función objetivo y el tiempo promedio de procesamiento.
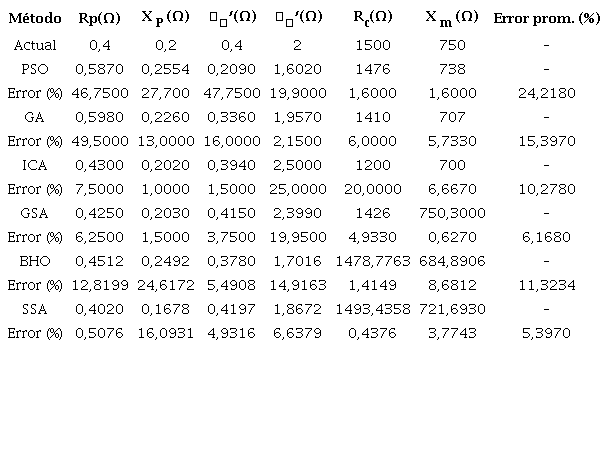
5.1. Transformador de prueba de 4 kVA
El transformador cuenta con una relación de tensión de 250/125 V, opera a 50 Hz y con una potencia nominal de 4 kVA. Para este transformador se empleó una carga resistiva igual a Rl = 15.625 Q, la cual es equivalente a la carga nominal de dicho transformador [16].
Los resultados mostrados en la tabla 2 indican que la estimación de los parámetros del transformador con el SSA presenta un error promedio de 5,397 % respecto a los parámetros reales del transformador, y se define al SSA como el método que presenta un menor error promedio en el cálculo de dichos parámetros, seguido del GSA que presenta un error promedio de 6,1680 % y del ICA que presenta un error promedio de 10,2780 %.
Resultados numéricos para la estimación paramétrica en el transformador de 4 kVA
Los resultados en la tabla 3 muestran que el SSA presenta un error promedio de 2,8963 x 10-9 al calcular el error entre las variables de tensión y corriente medidas y calculadas, seguido del BHO que cuenta con un error promedio de 8,1894 x 10-4, lo que indica que el algoritmo propuesto posee un error al menos 2,8275 x 105 veces más pequeño que el del BHO.
Variables medidas y calculadas para el transformador de 4 kVA
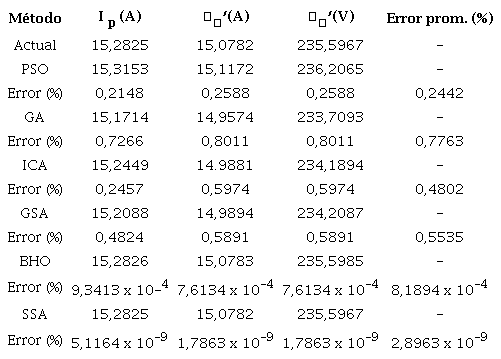
De esta forma, se determina que la metodología propuesta es más eficiente que la mejor metodología reportada hasta el momento en la literatura especializada [19].
Para verificar la efectividad y eficiencia del SSA al resolver el problema de estimación de parámetros de transformadores, se realizaron 100 evaluaciones consecutivas con las cuales se encontró que la mejor solución fue 1,6279 x 10-21, el valor promedio fue de 1,5777 x 1018 y la peor solución fue de 7,4616 x 1018, con una desviación estándar de 1,4587 x 10-18 y un tiempo promedio de procesamiento 0,2831s, lo que mejora significativamente los resultados obtenidos por los algoritmos utilizados previamente en la literatura especializada [19].
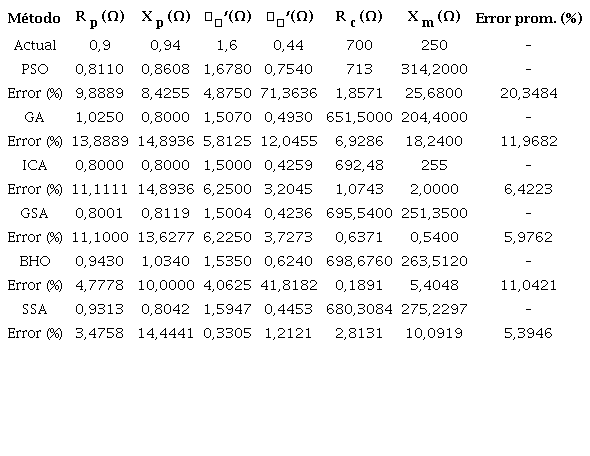
5.2. Transformador de prueba de 10 kVA
Este transformador cuenta con una relación tensión de 500/125 V, opera a 50 Hz y con una potencia nominal de 10 kVA. Para este transformador se empleó una carga resistiva igual a Rl = 25 Ω [16]. Los resultados mostrados en la tabla 4 indican que la estimación de los parámetros del transformador con el SSA cuenta con un error promedio de 5,3946 % respecto a los parámetros reales del transformador, por lo que el SSA se define como el método que presenta un menor error promedio en el cálculo de los parámetros, seguido del GSA que posee un error promedio de 5,9762 % y del ICA con un error promedio de 6,4223 %.
Resultados numéricos para la estimación paramétrica en el transformador de 10 kVA
Los resultados en la tabla 5 muestran que el SSA presenta un error promedio de 2,9160 x 10-8 al calcular el error entre las variables de tensión y corriente medidas y calculadas, seguido del error presentado por el BHO que cuenta con un error promedio de 3,30 x 10-3, lo que indica que el algoritmo propuesto posee un error de por lo menos 1 x 105 veces más pequeño que el del BHO. De esta forma, se determina que la metodología propuesta es más efectiva que la mejor metodología reportada hasta el momento.
Variables medidas y calculadas para el transformador 10 kVA
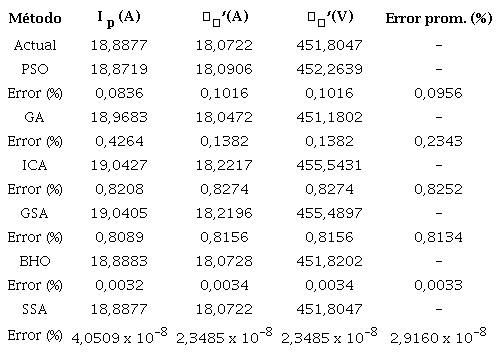
Al igual que con el sistema de prueba anterior, para corroborar la efectividad y eficiencia del SSA al resolver el problema de estimación de parámetros de transformadores, se realizaron 100 evaluaciones consecutivas con las cuales se encontró que la mejor solución fue 1,3720 x 1019, el valor promedio fue de 7,1928 x 1018 y la peor solución fue de 2,7624 x 1017, con una desviación estándar de 5,7594 x 1018 y un tiempo promedio de procesamiento 0,2610 s, lo que representa una mejora significativa de los resultados obtenidos por los algoritmos utilizados previamente en la literatura especializada [19].
5.3. Transformador de prueba de 15 kVA
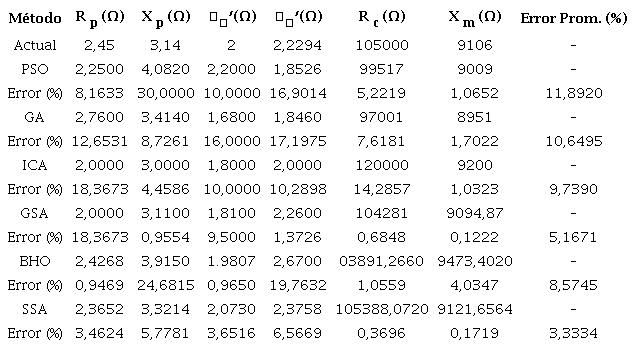
Este transformador cuenta con una relación de tensión de 2400/240 V, opera a 50Hz y con una potencia nominal de 15 kVA. Para este transformador se empleó una carga resistiva igual a Rl = 384 Ω [16]. Los resultados mostrados en la tabla 6 indican que la estimación de los parámetros del transformador con el SSA cuenta con un error promedio de 3,3334 % respecto a los parámetros reales del transformador por lo que el SSA es el método que presenta un menor error promedio en el cálculo de los parámetros, seguido del GSA que posee un error promedio de 5,1671 % y del BHO con un error promedio de 8,5745 %.
Resultados numéricos para la estimación paramétrica en el transformador de 15 kVA
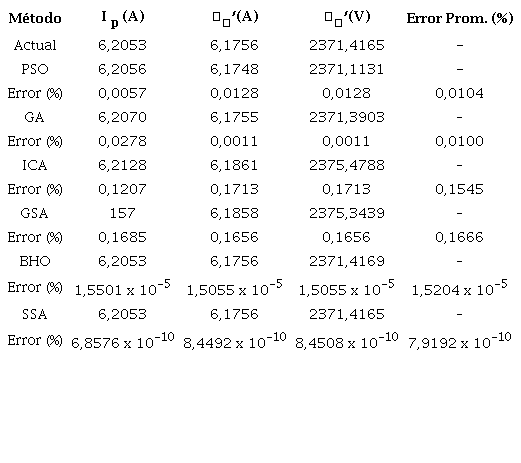
Los resultados en la tabla 7 muestran que el SSA presenta un error promedio de 7,9192 x 10-10 al calcular el error entre las variables de tensión y corriente medidas y calculadas, seguido del error presentado por el BHO que cuenta con un error promedio de 1,5204 x 10-5, lo que indica que el algoritmo propuesto posee un error al menos 10 x103 veces más pequeño que el del BHO.
Variables medidas y calculadas para el transformador de 15 kVA
Para verificar la efectividad y eficiencia del SSA al resolver el problema de estimación de parámetros de transformadores, se realizaron 100 evaluaciones consecutivas con las cuales se encontró que la mejor solución fue 9,4915 x 10-23, el valor promedio fue de 7,7132 x 1020 y la peor solución fue de 8,7882 x 10-20, con una desviación estándar de 1,8424 x 10-20 y un tiempo promedio de procesamiento 0,4301 s, mejorando significativamente los resultados obtenidos por los algoritmos utilizados previamente en la literatura especializada [19].
5.4. Análisis complementario
En esta sección se presenta un análisis complementario frente a los resultados obtenidos por el SSA al resolver el problema de estimación de parámetros de transformadores monofásicos, con el fin de mostrar la eficacia del método de estimación propuesto y demostrar cómo los errores encontrados por la metodología propuesta son despreciables cuando se comparan con valores reales. Para esto, se calcula la regulación de tensión y la eficiencia de cada uno de los transformadores de prueba seleccionados variando la carga conectada en sus terminales desde el 50 % hasta el 150 % respecto a su valor nominal.
La regulación de tensión (RV) para un transformador monofásico referido al primario se calcula como se define en la ecuación 18 [30].

El cálculo de la eficiencia (n) se realiza como se muestra en la ecuación 19 [30].

Donde Pin y Pout t son definidas como la potencia activa de entrada y salida del transformador, i. e., la potencia del primario y secundario, respectivamente.
En las figuras 3, 4 y 5, se muestra una comparación entre la regulación de tensión y la eficiencia del transformador en el modelo real y estimado, obtenida al variar la carga conectada en los terminales de cada uno de los transformadores estudiados.
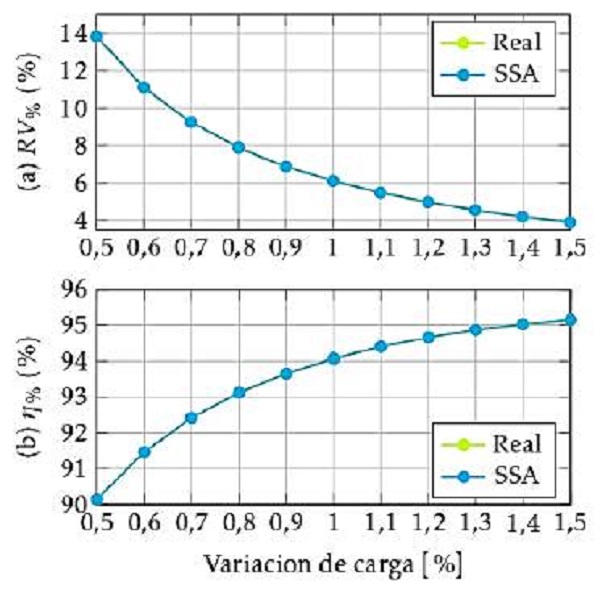
Figura 3
Comportamiento del transformador de prueba de 4 kVA ante variaciones de carga:(a) regulación de tensión y (b) eficiencia.
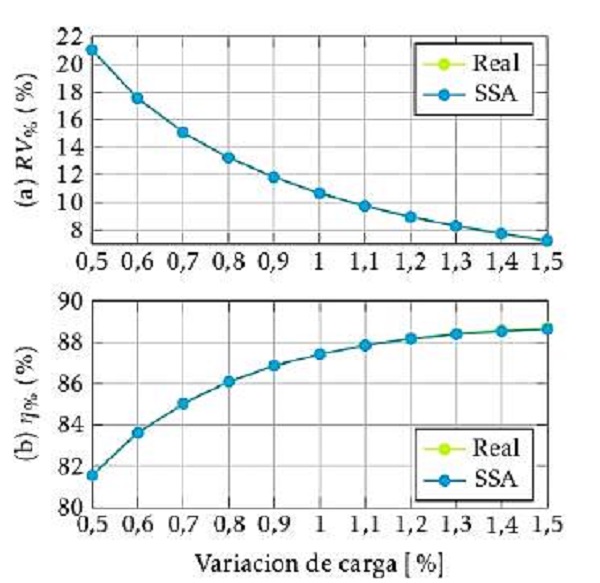
Figura 4
Comportamiento del transformador de prueba de 10 kVA ante variaciones de carga:(a) regulación de tensión y (b) eficiencia.
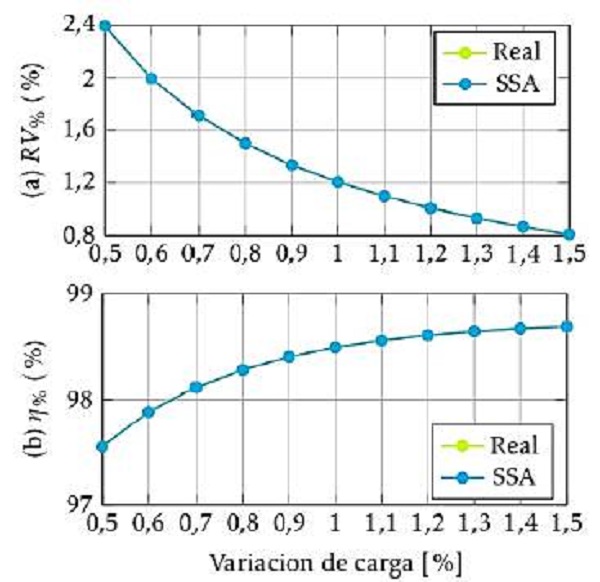
Figura 5
Comportamiento del transformador de prueba de 15 kVA ante variaciones de carga:(a) regulación de tensión y (b) eficiencia.
De las figuras 3, 4 y 5, se puede concluir lo siguiente:
-
La regulación de tensión es mayor ante una menor impedancia de carga en los terminales del transformador, esto se da debido a que mientras la tensión de entrada del transformador es constante cuando la carga se reduce (carga resistiva), la corriente que absorbe el transformador aumenta, y, por ello, también aumenta la caída de tensión en los devanados del transformador.
-
La eficiencia del transformador es menor cuanto menor es la impedancia de carga, debido a que la corriente absorbida por el transformador es mayor, y, por lo tanto, se disipa una mayor cantidad de potencia, provocando que la diferencia entre la potencia de entrada y salida aumente y por ello se reduzca la eficiencia.
-
El modelo estimado del transformador sigue el comportamiento de regulación tensión obtenido con los parámetros ideales del transformador, lo que evidencia un error promedio de 0,0390 %, 0,2163 % y 0,0446 % para los transformadores de 4 kVA, 10 kVA y 15 kVA, respectivamente. Estos resultados permiten concluir que el enfoque de optimización propuesto es eficiente al momento de estimar los parámetros eléctricos de transformadores monofásicos. Adicional a esto, los resultados confirman que no hay una única solución factible para el problema de optimización y que pueden existir múltiples soluciones que garanticen un rendimiento adecuado del transformador.
-
En el comportamiento de las curvas tanto de eficiencia como de regulación de tensión se puede ver cómo se superponen aquellas que responden a los valores reales del transformador y a los valores estimados. Esto indica que el SSA es un método adecuado para resolver el problema de estimación de parámetros en transformadores monofásicos.
5.5. Convergencia del algoritmo para los sistemas
En la figura 6 se ilustra el comportamiento de la convergencia del SSA propuesto para resolver el problema de estimación óptima de parámetros en transformadores monofásicos, donde se puede observar la evolución de la función objetivo en función del número de iteraciones para los tres transformadores de prueba propuestos.
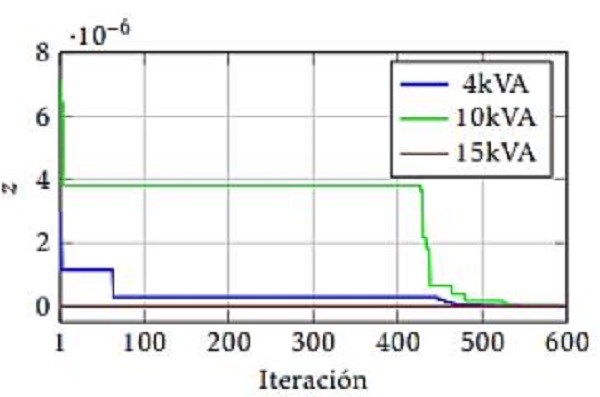
Figura 6
Comportamiento del valor de la función objetivo para los tres transformadores de prueba.
En esta figura se puede observar que desde la iteración 1 el SSA encuentra un valor de función objetivo de 2,96 x 10-6 para el transformador de 4 kVA, 7,12 x 106 para el transformador de 10 kVA y 1,00 x 10-8 para el transformador de 15 kVA, lo cual demuestra que la metodología propuesta converge rápidamente a un valor adecuado de la función objetivo. Esto confirma la efectividad y robustez del SSA desarrollado para resolver el problema bajo estudio.
6. Conclusiones y trabajos futuros
En este documento se presentó la aplicación del SSA para la estimación paramétrica en transformadores monofásicos. El SSA es un enfoque de optimización inspirado en el comportamiento de las salpas, que permite explorar y explotar el espacio de solución mediante ecuaciones que modelan el comportamiento de estos animales. Los resultados obtenidos con este enfoque de optimización mejoran los logrados hasta el momento con otros algoritmos en la literatura especializada. Estos resultados permitieron evidenciar que el SSA es una metodología de optimización que permite encontrar múltiples soluciones óptimas con un menor error, en comparación con otros métodos de optimización. Los errores promedio hallados por el SSA para parámetros de los transformadores de prueba fueron de 5,3970 %, 5,3946 % y 3,3334 % para los transformadores de 4 kVA, 10 kVA y 15 kVA, respectivamente; mientras que el error obtenido por el GSA, que es el algoritmo que presentaba la solución con menor error promedio en la estimación de parámetros de transformadores, fue de 6,1680 %, 5,9762 % y 5,1671 % para los transformadores estudiados. Estos resultados muestran que el SSA disminuyó el error promedio reportado por el GSA en por lo menos 1 % para todos los transformadores monofásicos estudiados.
Los resultados obtenidos también mostraron que el parámetro que presenta una mayor diferencia con el valor real es Xp en todos los transformadores de prueba seleccionados; sin embargo, debido a que los demás parámetros se encuentran más cerca del valor real, en comparación con los resultados obtenidos con los otros algoritmos, este valor no influencia en gran medida el rendimiento final del algoritmo. Lo anterior confirma que el problema de estimación paramétrica en transformadores tiene múltiples soluciones óptimas, por lo cual requiere de más investigación.
Los trabajos futuros que se podrán realizar son: (i) aplicar nuevos métodos de optimización como el algoritmo de optimización de búsqueda por vórtices o el algoritmo de optimización de huracanes; (ii) validar de manera experimental los resultados obtenidos por el método SSA; y (iii) aplicar el método SSA a la estimación paramétrica de motores de inducción y módulos fotovoltaicos.
Referencias
T. R. Chaves, M. A. I. Martins, K. A. Martins, A. F. de Macedo, and S. de Francisci, “Application Study in the Field of Solutions for the Monitoring Distribution Transformers of the Overhead Power Grid,” Energies, vol. 14, no. 19, p. 60-72, 2021, doi: https://doi.org/10.3390/en14196072
S. Guarín, S. Velarde, E. Castaño, A. Molina-Cabrera, “Construction and simulation of a planar transformer prototype,” Transactions on Energy Systems and Engineering Applications, vol. 2, no. 2, pp. 1-7, 2021, doi: https://doi.org/10.32397/tesea.vol2.n2.1
H. Besharatifard, S. Hasanzadeh, E. Heydarian Forushani, H. H. Alhelou, P. Siano, “Detection and Analysis of Partial Discharges in OilImmersed Power Transformers Using Low Cost Acoustic Sensors,” Applied Sciences, vol. 12, no. 6, p. 3010, 2022, doi: https://doi.org/10.3390/app12063010
S. Bhattacharya, “Transforming the transformer,” IEEE Spectrum, vol. 54, no. 7, pp. 38-43, 2017, doi: https://doi.org/10.1109/MSPEC.2017.7951721
M. Tahir, S. Tenbohlen, “A Comprehensive Analysis of Windings Electrical and Mechanical Faults Using a High Frequency Model,” Energies, vol. 13, no. 1, p. 105, 2019, doi: https://doi.org/10.3390/en13010105
J. Gao, J. Gao, Q. Guo, L. Li, “Research on operation status and fault deduction system design of transformer in large sports venues,” Energy Reports, vol. 8, pp. 539-546, 2022, doi: https://doi.org/10.3390/en13010105
B. Zeng, J. Guo, W. Zhu, Z. Xiao, F. Yuan, S. Huang, “A Transformer Fault Diagnosis Model Based On Hybrid Grey Wolf Optimizer and LS-SVM,” Energies, vol. 12, no. 21, p. 4170, 2019, doi: https://doi.org/10.3390/en12214170
S. Y. Bocanegra, O. D. Montoya, A. Molina-Cabrera , “Estimación de parámetros en transformadores monofásicos empleando medidas de tensión y corriente,” Revista UIS Ingenierías, vol. 19, no. 4, pp. 63-75, may 2020, doi: https://doi.org/10.18273/revuin.v19n4-2020006
S. Y. Bocanegra, O. D. Montoya, A. Molina, “Sine-cosine optimization approach applied to the parametric estimation in single phase transformers by considering voltage and current measures,” Dyna, vol. 88, no. 219, pp. 19-27, 2021, doi: https://doi.org/10.15446/dyna.v88n219.93670
A. Tokić, I. Uglešić, G. Štumberger, “Simulations of Transformer Inrush Current by Using BDF-Based Numerical Methods,” Mathematical Problems in Engineering, vol. 2013, pp. 1-10, 2013, doi: https://doi.org/10.1155/2013/215647
M. Ćalasan, D. Mujičić, V. Rubežić, M. Radulović, “Estimation of Equivalent Circuit Parameters of Single-Phase Transformer by Using Chaotic Optimization Approach,” Energies, vol. 12, no. 9, p. 1697, 2019, doi: https://doi.org/10.1155/2013/215647
M. I. Abdelwanis, A. Abaza, R. A. El-Sehiemy, M. N. Ibrahim, H. Rezk, “Parameter Estimation of Electric Power Transformers Using Coyote Optimization Algorithm With Experimental Verification,” IEEE Access, vol. 8, pp. 50036-50044, 2020, doi: https://doi.org/10.1109/ACCESS.2020.2978398
R. Kazemi, S. Jazebi, D. Deswal, F. de Leon, “Estimation of Design Parameters of SinglePhase Distribution Transformers From Terminal Measurements,” IEEE Transactions on Power Delivery, vol. 32, no. 4, pp. 2031-2039, 2017, doi: https://doi.org/10.1109/TPWRD.2016.2621753
M. Calasan, A. Jovanovic, V. Rubezic, D. Mujicic, A. Deriszadeh, “Notes on parameter estimation for single-phase transformer,” IEEE Transactions on Industry Applications, pp. 1-1, 2020, doi: https://doi.org/10.1109/TIA.2020.2992667
S. Padma, S. Subramanian, “Parameter estimation of single phase core type transformer using bacterial foraging algorithm,” Engineering, vol. 2, no. 11, p. 917, 2010, doi: http://dx.doi.org/10.4236/eng.2010.211115
M. I. Mossad, M. Azab, A. Abu-Siada, “Transformer parameters estimation from nameplate data using evolutionary programming techniques,” IEEE transactions on power delivery, vol. 29, no. 5, pp. 2118-2123, 2014, doi: https://doi.org/10.1109/TPWRD.2014.2311153
D. Bhowmick, M. Manna, S. K. Chowdhury, “Estimation of equivalent circuit parameters of transformer and induction motor from load data,” IEEE Transactions on Industry Applications, vol. 54, no. 3, pp. 2784-2791, 2018, doi: https://doi.org/10.1109/TIA.2018.2790378
Z. Yilmaz, M. Oksar, F. Basciftci, “Multiobjective artificial bee colony algorithm to estimate transformer equivalent circuit parameters,” Periodicals of Engineering and Natural Sciences, vol. 5, no. 3, 2017, doi: http://dx.doi.org/10.21533/pen.v5i3.103
C. A. Arenas-Acuña, J. A. Rodríguez-Contreras, O. D. Montoya, E. Rivas-Trujillo, “Blackhole optimization applied to the parametric estimation in distribution transformers considering voltage and current measures,” Computers, vol. 10, no. 10, p. 124, 2021, doi: https://doi.org/10.3390/computers10100124
H. A. Illias, K. Mou, A. Bakar, “Estimation of transformer parameters from nameplate data by imperialist competitive and gravitational search algorithms,” Swarm and Evolutionary Computation, vol. 36, pp. 18-26, 2017, doi: https://doi.org/10.1016/j.swevo.2017.03.003
D. G. Gracía-Velásquez, A. S. Morales-Rodríguez, O. D. Montoya, “Application of the Crow Search Algorithm to the Problem of the Parametric Estimation in Transformers Considering Voltage and Current Measures,” Computers, vol. 11, no. 1, p. 9, 2022, doi: https://doi.org/10.3390/computers11010009
S. J. Chapman, Electric machinery fundamentals. McGraw-Hill, 2004.
S. Mirjalili, A. H. Gandomi, S. Z. Mirjalili, S. Saremi, H. Faris, S. M. Mirjalili, “Salp swarm algorithm: A bio-inspired optimizer for engineering design problems,” Advances in Engineering Software, vol. 114, pp. 163-191, 2017, doi: https://doi.org/10.1016/j.advengsoft.2017.07.002
A. E. Hegazy, M. Makhlouf, G. S. El-Tawel, “Improved salp swarm algorithm for feature selection,” Journal of King Saud University - Computer and Information Sciences, vol. 32, no. 3, pp. 335-344, 2020, doi: https://doi.org/10.1016/j.jksuci.2018.06.003
R. A. Ibrahim, A. A. Ewees, D. Oliva, M. Abd Elaziz, and S. Lu, “Improved salp swarm algorithm based on particle swarm optimization for feature selection,” Journal of Ambient Intelligence and Humanized Computing, vol. 10, no. 8, pp. 3155-3169, 2019, doi: https://doi.org/10.1007/s12652-018-1031-9
H. Zhang, T. Liu, X. Ye, A. A. Heidari, G. Liang, H. Chen, and Z. Pan, “Differential evolutionassisted salp swarm algorithm with chaotic structure for real-world problems,” Engineering with Computers, 2022, doi: https://doi.org/10.1007/s00366-021-01545-x
T. A. Jumani, M. Mustafa, W. Anjum, S. Ayub et al., “Salp swarm optimization algorithmbased controller for dynamic response and power quality enhancement of an islanded microgrid,” Processes, vol. 7, no. 11, p. 840, 2019, doi: https://doi.org/10.3390/pr7110840
J. Montano, A. F. T. Mejía, A. A. Rosales Muñoz, F. Andrade, O. D. Garzín Rivera, J. M. Palomeque, “Salp swarm optimization algorithm for estimating the parameters of photovoltaic panels based on the three-diode model,” Electronics, vol. 10, no. 24, p. 3123, 2021, doi: https://doi.org/10.3390/electronics10243123
S. B. Chaabane, A. Belazi, S. Kharbech, A. Bouallegue, L. Clavier, “Improved Salp Swarm Optimization Algorithm: Application in Feature Weighting for Blind Modulation Identification,” Electronics, vol. 10, no. 16, p. 2002, 2021, doi: https://doi.org/10.3390/electronics10162002
S. Baqaruzi and S. T. Kasim, “Comparison of effect efficiency and voltage regulation between three-phase transformer winding connections,” Bulletin of Computer Science and Electrical Engineering, vol. 1, no. 2, pp. 54-62, 2020, doi: https://doi.org/10.25008/bcsee.v1i2.1123
Notas
