Resumen:
Este artículo tiene como objetivo comparar el rendimiento de dos controladores ampliamente utilizados en el control de sistemas dinámicos: el controlador PID (Proporcional-Integral-Derivativo) y el controlador LQR (Regulador Cuadrático Lineal). Se presenta una simulación detallada utilizando Simulink de MATLAB® para evaluar el comportamiento de un robot móvil autónomo auto equilibrado de dos ruedas. Se ha desarrollado un modelo matemático que describe con precisión el sistema del robot. Luego, se aplicaron técnicas de diseño específicas a cada controlador, y se observó el comportamiento resultante en términos de estabilidad y respuesta. Esta comparación tiene implicaciones importantes en el campo del control de sistemas autónomos y puede ayudar a determinar cuál de los dos controladores es más adecuado para aplicaciones particulares de robots móviles autónomos auto equilibrados.
Palabras clave: Comparación de Controladores, Control de Sistemas Autónomos, controlador LQR, Control de Robots Móviles, controlador PID, Estabilidad de Sistemas, Simulación, Modelado Matemático, robot móvil, Simulación de Robots Autónomos, Tecnología de Control en MATLAB.
Abstract:
This article aims to compare the performance of two widely used controllers in the control of dynamic systems: the PID (Proportional-Integral-Derivative) controller and the LQR (Linear Quadratic Regulator) controller. A detailed simulation using MATLAB® Simulink is presented to evaluate the behavior of a two-wheeled autonomous self-balancing mobile robot. A mathematical model that accurately describes the robot system has been developed. Specific design techniques were then applied to each controller, and the resulting behavior was observed in terms of stability and response. This comparison has significant implications in the field of autonomous systems control and can help determine which of the two controllers is more suitable for applications of autonomous self-balancing mobile robots.
Keywords: Controller Comparison, Autonomous Systems Control, LQR Controller, Mobile Robot Control, PID Controller, System Stability, Simulation, Mathematical Modeling, Mobile Robot, Autonomous Robot Simulation, Control Technology in MATLAB.
Carátula del artículo
Modelado y control óptimo de la estabilidad de un robot móvil de dos ruedas utilizando técnicas PID y LQR
Modeling and optimal control of the stability of a two-wheeled mobile robot using PID and LQR techniques
 Rafael Antonio Acosta Rodríguez rafael.acosta@usa.edu.co
Rafael Antonio Acosta Rodríguez rafael.acosta@usa.edu.co
Universidad Sergio Arboleda, Colombia
Juan Díaz Téllez juan.diaz@puebla.tecnm.mx
Instituto Tecnológico de Puebla, Mexico
Germán Ardul Muñoz Hernández germanardul.munoz@correo.buap.mx
Benemérita Universidad Autónoma de Puebla, Mexico
José Fermi Guerrero Castellanos Fermi.guerrero@correo.buap.mx
Benemérita Universidad Autónoma de Puebla, Mexico
Avances, vol. 20, no. 2, e5, 2023
Universidad Libre
Received: 04 November 2023
Accepted: 07 December 2023
1. INTRODUCCIÓN
En las últimas décadas, los robots móviles han experimentado un crecimiento significativo en su desarrollo y aplicación, lo que ha llevado a la creación de máquinas autónomas diseñadas para facilitar una amplia gama de tareas en la vida cotidiana. La investigación en este campo ha sido fundamental para lograr robots completamente autónomos, capaces de desempeñar funciones que van desde la exploración en entornos hostiles hasta la asistencia en el hogar y el transporte personal [3] [5] [6].
Un ejemplo notable de esta evolución tecnológica es el Segway, que se ha convertido en una alternativa moderna de transporte, revolucionando la movilidad personal en áreas urbanas y suburbanas. El Segway es un dispositivo de movilidad personal que se destaca por su capacidad para mantener el equilibrio sobre una base con dos ruedas laterales. Su funcionamiento se basa en una combinación de sensores y controladores que permiten que el vehículo se mantenga en posición vertical y se desplace con la orientación deseada, todo ello mientras responde de manera autónoma a los movimientos del usuario [5] [8] [9].
El estudio y comparación de controladores en el contexto del control de un robot móvil autónomo auto equilibrado de dos ruedas se convierte en un campo de investigación relevante y desafiante. La capacidad de mantener el equilibrio y responder de manera precisa a las perturbaciones es esencial para el funcionamiento seguro y eficiente de tales dispositivos. Esta hazaña tecnológica ha sido posible gracias a los avances en la ingeniería de control y la aplicación de diversas técnicas y algoritmos, como los controladores PID (Proporcional-Integral-Derivativo) y LQR (Regulador Cuadrático Lineal) [1] [4] [6] [7].
Este artículo presenta una simulación detallada de estos controladores en el contexto de un robot móvil autónomo auto equilibrado, con el objetivo de analizar y comparar su desempeño en términos de estabilidad y control. A través de esta investigación, se pretende aportar a la comprensión de las tecnologías que hacen posible la autonomía y estabilidad de dispositivos como el Segway, y su aplicabilidad en otros campos de la robótica y la movilidad personal [11]. Además, se busca evaluar cómo estas tecnologías pueden contribuir al diseño y la implementación de sistemas de transporte inteligentes y sostenibles [2] [10].
Los robots móviles en los últimos años han sido desarrollados para facilitar tareas a los seres humanos en su vida diaria, por lo que la investigación ha sido de interés para obtener robots completamente autónomos. El Segway se ha convertido en una alternativa moderna de transporte cuyo funcionamiento se basa en encontrar el equilibrio entre una base con dos ruedas laterales.
El modelo del robot móvil autónomo auto equilibrado de dos ruedas que presentamos se basa en el principio del péndulo invertido. La dinámica del péndulo invertido ha sido la base de los robots bípedos, hélices espaciales y control de actitud de pequeños satélites. En la siguiente figura muestra los movimientos básicos del robot, conduciendo movimientos hacia atrás, conduciendo hacia los lados el movimiento y girando en su propio eje (Fig. 1).
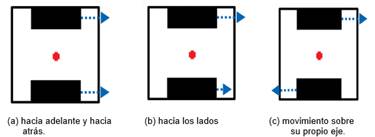 Figura 1
Movimiento del robot (Diseño propio).
Figura 1
Movimiento del robot (Diseño propio).
El movimiento hacia atrás se logra cuando la velocidad de ambos motores se incrementa o disminuyó en la misma cantidad. El movimiento lateral se alcanza cuando se aumenta la velocidad del motor izquierdo, mientras que la velocidad de la derecha se reduce y viceversa. El girar en su propio eje se logra cuando la velocidad de ambos motores se incrementa en la dirección opuesta.
2. PROCEDIMIENTO
2.1 Etapa de revisión
El modelado es analizado matemáticamente a partir de la aplicación de las leyes de movimiento de Newton, donde las fuerzas y variables que actúan en el sistema se observan en la (Fig. 2). Se considera la barra con masa despreciable y en su extremo superior se posiciona una masa (m) que oscila libremente alrededor de un pivote fijo (P) montado en el carro de masa (M) que se desplaza sobre una trayectoria lineal. [1]
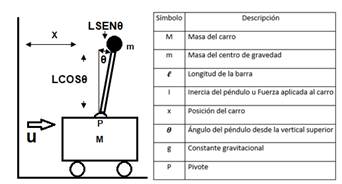 Figura 2
Sistema Péndulo Invertido sobre un Carro
Figura 2
Sistema Péndulo Invertido sobre un Carro
Los coeficientes de fricción del pivote y las ruedas se consideran despreciables y la tabla representa la descripción de las variables del sistema mostradas en la Figura 2
3. MODELO MATEMÁTICO
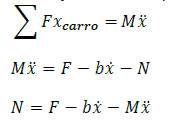
Primero se analizan las fuerzas actuantes en el eje horizontal para el carro y el péndulo ´ obteniendo:
Al igualar las ecuaciones 1 y 2, se obtiene la primera ecuación dinámica de nuestro sistema:
La segunda ecuación se obtiene a las fuerzas perpendiculares que actúan en nuestro sistema obteniendo la ecuación 4 el torque de las fuerzas sobre la barra del péndulo nos proporciona otra ecuación para obtener la ecuación dinámica del sistema.
juntando las ecuaciones 4 y 5 se obtiene la siguiente ecuación:
El objetivo de control para el sistema consiste en mantener el péndulo lo más vertical. Considerando que los ángulos 𝜽 y  son pequeños, es posible linealizar el sistema en las ecuaciones (3) y (6) al sustituir 𝒔𝒆𝒏𝜽 = 0 y 𝒄𝒐𝒔𝜽 = 𝟏, considerando que la fuerza F corresponde a la señal de control u, respectivamente y con las expresiones anteriores se obtienen las ecuaciones (7) y (8).
son pequeños, es posible linealizar el sistema en las ecuaciones (3) y (6) al sustituir 𝒔𝒆𝒏𝜽 = 0 y 𝒄𝒐𝒔𝜽 = 𝟏, considerando que la fuerza F corresponde a la señal de control u, respectivamente y con las expresiones anteriores se obtienen las ecuaciones (7) y (8).
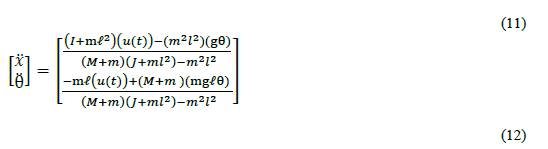
El movimiento del sistema está limitado a dos grados de libertad y su modelo matemático no lineal está representado por las ecuaciones (7) y (8). La expresión (9) representa las ecuaciones diferenciales ordinarias lineales del sistema en forma matricial.
La expresión (10) se utiliza para la obtención de los términos respectivamente.
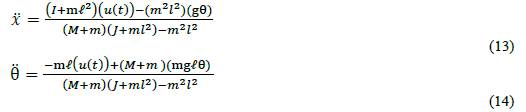
El modelo matemático para el diseño del control está representado con las ecuaciones (13) y (14):
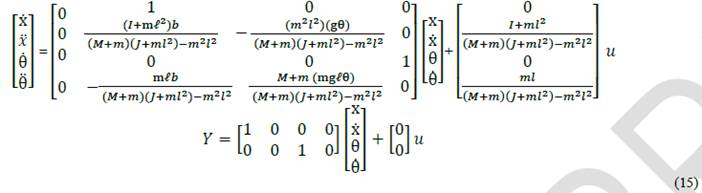
La linealización aproximada del sistema en el punto de equilibrio está representada con la ecuación (15) en variables de estado
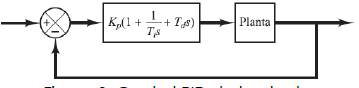 Figura 3
Control PID de la planta
Figura 3
Control PID de la planta
4. CONTROLADORES PID Y LQR
El control LQR (por sus siglas en inglés Linear Quadratic Regulator), consiste en la estabilidad de un sistema en lazo cerrado con la ganancia de realimentación. Este método consiste en optimizar el costo, las matrices de pesoQyRse convierten en los parámetros de diseño [1].
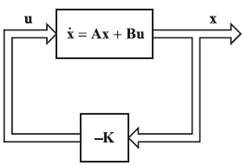 Figura 4
Sistema regulador óptimo
Figura 4
Sistema regulador óptimo
Por lo tanto, ya haber obtenido el modelo matemático en variables de estado del sistema dinámico
Para lograr este resultado se requiere resolver la siguiente ecuación diferencial de Riccati, en la solución no puede reducirse a un número finito de integraciones sucesivas
para obtener la matriz K óptima se utilizará MATLAB ya que cuenta la orden
El control PID, es un método de control clásico por realimentación, consiste en calcula la diferencia entre el valor medido y el valor deseado, dicha diferencia se conoce como error. Este sistema posee tres componentes: ganancia proporcional, ganancia integral y ganancia derivativa. El primero depende del error actual, el segundo de errores pasados y el tercero es una predicción de errores futuros [1].
La acción proporcional P, da una señal de control que es proporcional al error:
La acción integral I tiene una señal de control proporcional al error acumulado, que se define como:
Finalmente, la acción diferencial D proporciona:
Ejecute la suma de estos tres componentes, la señal obtenida del controlador PID es
MATLAB® cuenta con una herramienta en Simulink® para trabajar con el modelo este es PID Tuner diseña automáticamente un controlador (P, I, PI, PD, PDF, PID, PIDF) y la forma que se puede ajustarse el tiempo de respuesta o el comportamiento transitorio y ver como se modifican parámetros del controlador como KP, TN y TD(TV) o KI y KD y parámetros de la respuesta como tiempo de establecimiento, sobre impulso, etc. [2]
 Figura 5
Aplicación PID Tuner
Figura 5
Aplicación PID Tuner
Dentro de la aplicación PID tuner se encuentra PID 1-DOF en donde se encuentra PID, como se muestra en la figura 5.
 Figura 6
Aplicación PID Turner (PID 1-DOF)
Figura 6
Aplicación PID Turner (PID 1-DOF)
El diseño se realiza Simscape™ que nos permite implementar rápidamente los modelos de sistemas físicos dentro del entorno de Simulink®, para la implementación de control y a probar el rendimiento a nivel de sistema.
5. IMPLEMENTACIÓN
Se desarrolla el modelo del robot en Simscape™ para realizar la implementación de los controladores PID y LQR, posteriormente ver su comportamiento y poder hacer la comparación de los dos controladores.
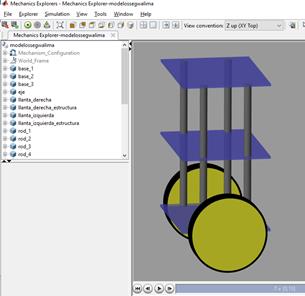 Figura 7
Modelo en Simscape™
Figura 7
Modelo en Simscape™
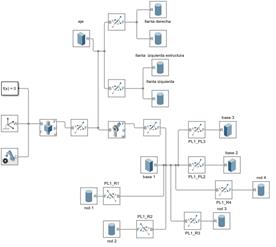 Figura 8
Modelo a bloques en Simulink®.
Figura 8
Modelo a bloques en Simulink®.
En la figura 6 se muestra el modelo del robot móvil implementado en Simscape™ y en la figura 7 se muestra en bloques en Simulink®.
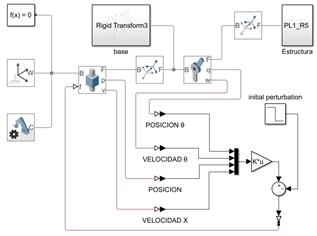 Figura 9
Implementacion del control LQR.
Figura 9
Implementacion del control LQR.
En la figura 8 se muestra la implementacion del control LQR para nuestro sistema.
 Figura 10
Obtencion de la matriz K, utilizabdo matlab.
Figura 10
Obtencion de la matriz K, utilizabdo matlab.
En la siguiente figura 9 se muestra el código en Matlab para la obtención de la matriz K, utilizando el comando LQR.
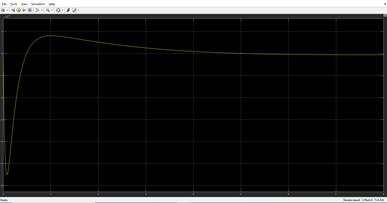 Figura 11
Representacion del control LQR en el sistema con una perturvacion.
Figura 11
Representacion del control LQR en el sistema con una perturvacion.
En la figura 10 se musetra la respuesta obtenida con el control LQR con una perturvacion.
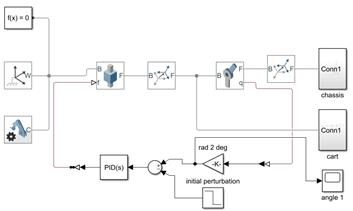 Figura 12
Implementacion del control PID.
Figura 12
Implementacion del control PID.
En la figura 12 se muestra la implementacion del control PID a nuestro sistema.
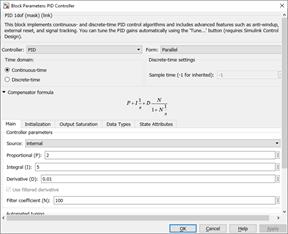 Figura 13
Parametros del PID
Figura 13
Parametros del PID
En la figura 13, se presentan los parámetros resultantes obtenidos a través del uso de PID Tuner. Esta herramienta se empleó para ajustar y optimizar los parámetros de un controlador PID, lo que es fundamental en el control de sistemas dinámicos. La figura proporciona una representación visual de los valores específicos de los parámetros, lo que es crucial para lograr un control eficaz y preciso en el sistema en cuestión. El uso de PID Tuner contribuye a la mejora del rendimiento del controlador y, en última instancia, a la estabilidad y respuesta deseada del sistema
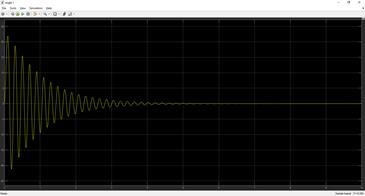 Figura 14
Representacion del control PID en el sistema con una perturvacion.
Figura 14
Representacion del control PID en el sistema con una perturvacion.
La figura 14 la respuesta obtenida con el control PID con una perturbacion.
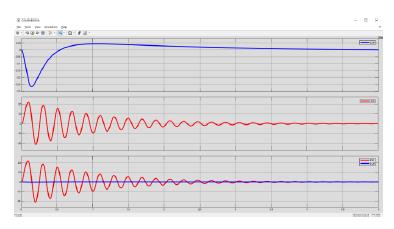 Figura 15
Comparacion entre el control PID y el LQR en el sistema con una perturvacion.
Figura 15
Comparacion entre el control PID y el LQR en el sistema con una perturvacion.
6. CONCLUSIONES
Es fundamental destacar que la implementación del control basado en el método LQR en el sistema lineal resulta en una estabilización más suave en comparación con un controlador PID. Durante el proceso de evaluación, se llevaron a cabo simulaciones exhaustivas que incluyeron la introducción de diversas fuentes de perturbaciones externas, como ruido en los actuadores y sensores. Particularmente, se prestó especial atención al sensor de unidad inercial, que a menudo es sensible a variaciones en el entorno.
Los resultados de estas pruebas arrojaron conclusiones significativas. En primer lugar, se observó que el controlador LQR conserva su eficacia en la estabilización del sistema, incluso cuando se enfrenta a diferentes perturbaciones que alejan al sistema de su punto de equilibrio. Este enfoque demostró una notable capacidad para mantener la estabilidad y el rendimiento del sistema en condiciones adversas.
Por otro lado, el controlador PID exhibió una mayor dificultad para cumplir con esta tarea en situaciones con perturbaciones significativas. Esto resalta la robustez y la eficiencia del control LQR al lidiar con condiciones adversas y perturbaciones, lo que lo convierte en una elección óptima para lograr una mayor eficiencia en el gasto de energía en sistemas autónomos, incluso en entornos desafiantes.
Referencias
Ogata, katsuhiko. ingenieria de control moderna. 5a. ed. madrid: prentice hall hispanoamericana,2010.
Braunl, Thomas. (2006). Embedded robotics: Mobile robot design and applications with embedded systems: Second edition. Embedded Robotics: Mobile Robot Design and Applications with Embedded Systems: Second Edition. 10.1007/3-540-34319-9.
Braunl, Thomas. (2006). Embedded robotics: Mobile robot design and applications with embedded systems: Second edition. Embedded Robotics: Mobile Robot Design and Applications with Embedded Systems: Second Edition. 10.1007/3-540-34319-9.
L. J. Pinto and D. Kim and J. Y. Lee and C. Han, 2012 IEEE/SICE International Symposium on System Integration (SII), Development of a Segway robot for an intelligent transport system
B. Shilpa and V. Indu and S. R. Rajasree 2017 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Design of an underactuated self-balancing robot using linear quadratic regulator and integral sliding mode controller.
I. D. Basnayake and T. W. U. Madhushani and D. H. S. Maithripala, 2017 IEEE International Conference on Industrial and Information Systems (ICIIS), Intrinsic PID controller for a Segway type mobile robot
Jorge Solis, Ryu Nakadate, Yuki Yoshimura, Yuichiro Hama, Atsuo Takanishi School of Creative Science and Engineering, Development of the two-wheeled inverted pendulum type mobile robot WV-2R for educational purposes
Muhammad Umar Draz, Mohsin Shaheer Ali, Maryam Majeed, Umair Ejaz, Umer Izhar, 2012 International Conference on Robotics and Artificial Intelligence (ICRAI 2012), Segway Electric Vehicle.
Muhammad Harris Khan, Mehak Chaudhry, Taimoor Tariq, Qurat-ul-Ain Fatima, Umer Izhar, International Conference on Mechatronics and Automation, Fabrication and Modelling of Segway.
Surachat Chantarachit, 2019 International Conference on Information and Communications Technology (ICOIACT), Development and Control Segway by LQR adjustable Gain.
Notes
Notes
Cómo citar Acosta, R. ., Díaz Téllez, . J. ., Muñoz Hernández, G. A. ., & Guerrero Castellanos, J. F. . Modelado y control óptimo de la estabilidad de un robot móvil de dos ruedas utilizando técnicas PID y LQR. Avances Investigación En Ingeniería, 20(2).
https://doi.org/10.18041/1794-4953/avances.2.10918